Изобретение относится к судостроению и может быть использовано для внутрипортовых перемещений или коррекции местоположения плавсредств и свободных платформ. [B63B 1/00, B63B 35/44].
Из уровня техники известно ДИНАМИЧЕСКИ ПОЗИЦИОНИРУЕМОЕ ПОЛУПОГРУЖНОЕ БУРОВОЕ СУДНО (US6378450 B1, опубл. 30.04.2002), состоящее из пары плавучих понтонов; множества вертикально простирающихся колонн, поддерживаемых указанными понтонами, причем верхние части указанных понтонов несут платформу, приспособленную для проведения с нее морских операций; пары параллельных горизонтальных раскосов, проходящих между каждой парой противоположных колонн, причем одна из указанной пары горизонтальных раскосов расположена между противолежащими передними колоннами, а другая из указанной пары горизонтальных раскосов расположена между противоположными задними колоннами, причем указанные распорки препятствуют растеканию и созданию крутящего момента силы, действующего на указанные колонны из-за бокового изгиба понтонов, причем каждая из указанных раскосов имеет в основном овальное поперечное сечение для минимизации сил сопротивления на каждой из указанных раскосов, вызванных волновыми движениями. Судно также содержит средства удержания стационарного положения с динамическим позиционированием, соединенные с указанными понтонами, для удержания указанного судна в желаемом месте в открытом море, которые содержат множество независимо управляемых подруливающих устройств.
Недостатком аналога является невозможность коррекции положения судна во всей горизонтальной плоскости.
Также из уровня техники известна БУРОВАЯ УСТАНОВКА (US6247421 B1, опубл. 19.06.2001), которая имеет понтонные корпуса, погружаемые под поверхность водоема для создания водоизмещения, опорные колонны, отходящие вертикально от указанных корпусов понтонов и ориентированные таким образом, чтобы пересекать поверхность водоема, рабочую палубу, поддерживаемую указанными опорными колоннами и расположенную в положении над поверхностью водоема. Также установка содержит надставку буровой установки содержащую надстройку корпуса понтона и соединенное с ним подруливающее устройство. Указанное подруливающее устройство выполнено с возможностью обеспечения динамического удержания установки.
Недостатком аналога является невозможность коррекции положения установки во всей горизонтальной плоскости.
Наиболее близким по технической сущности является САМОХОДНОЕ ПОЛУПОГРУЖНОЕ СУДНО ДВОЙНОГО НАЗНАЧЕНИЯ КАТАМАРАННОГО ТИПА С ГИДРОДИНАМИЧЕСКИМИ КОРПУСАМИ И КОЛОННАМИ (US9446825 B1, опубл. 20.09.2016) содержащее: (a) удлиненный корпус с балластом левого борта и удлиненный корпус с балластом правого борта, причем корпуса левого и правого бортов расположены по существу параллельно, на расстоянии друг от друга, и в котором каждый из указанных левого и корпус правого борта имеет внешнюю оболочку с закругленной носовой частью, сужающейся кормой и изогнутым поперечным сечением, две или более колонны левого борта, соединенные с корпусом левого борта и поддерживаемые им, при этом каждая из двух или более колонн левого борта проходит по существу перпендикулярно вверх от верхней поверхности корпуса левого борта, имеет внешнюю оболочку с горизонтальным поперечным сечением, две или более колонны правого борта, соединенные с корпусом правого борта и поддерживаемые им, при этом каждая из двух или более колонн правого борта проходит по существу перпендикулярно вверх от верхней поверхности корпуса правого борта, горизонтальная платформа, соединенная с колоннами левого и правого бортов и поддерживаемая ими и устроенная таким образом, чтобы удерживать корпуса левого и правого бортов в разнесенном положении, при этом судно устроено так, что, когда оно находится в воде, левый и правый борт корпуса по существу погружены в воду, платформа находится над поверхностью воды и по существу параллельна ей, а колонны левого и правого борта проходят через поверхность воды; и (e) подъемное устройство, установленное на платформе, причем корпуса по левому и правому борту, колонны по левому и правому борту, платформа и подъемное устройство расположены таким образом, чтобы подъемное устройство могло поднимать или опускать подводный объект снизу.
Основной технической проблемой прототипа является относительно грубая корректировка положения судна в горизонтальной плоскости только в двух направлениях (север-юг и запад-восток).
Задача изобретения заключается в устранении недостатков прототипа.
Технический результат изобретения заключается в обеспечении возможности коррекции положения плавучего средства по всей горизонтальной плоскости с большой точностью.
Указанный технический результат достигается за счет того, что способ коррекции местоположения плавучего средства, характеризуется тем, что вокруг подводной части плавучего средства в одной горизонтальной плоскости размещают и жестко закрепляют несколько десятков движителей, использующих для создания реактивной силы энергию сжатого воздуха, который проходит через систему форсунок и уже в виде мелкодисперсной пены воздействует на закрепленную внутри каждого движителя наклонную плоскость, при этом вся совокупность движителей создает реактивную силу, результирующий вектор которой может быть направлен в любом направлении в горизонтальной плоскости, а управление указанными движителями осуществляется посредством компьютерной системы, которая оценивает отклонение от заданной точки и формирует управляющие сигналы для точной коррекции местоположения плавучего средства, при этом управление движителями осуществляется за счет того, что компьютерная система задает абсолютные значения импульса для каждого движителя, которые прямо пропорциональны пропущенному объему воздуха.
Краткое описание чертежей
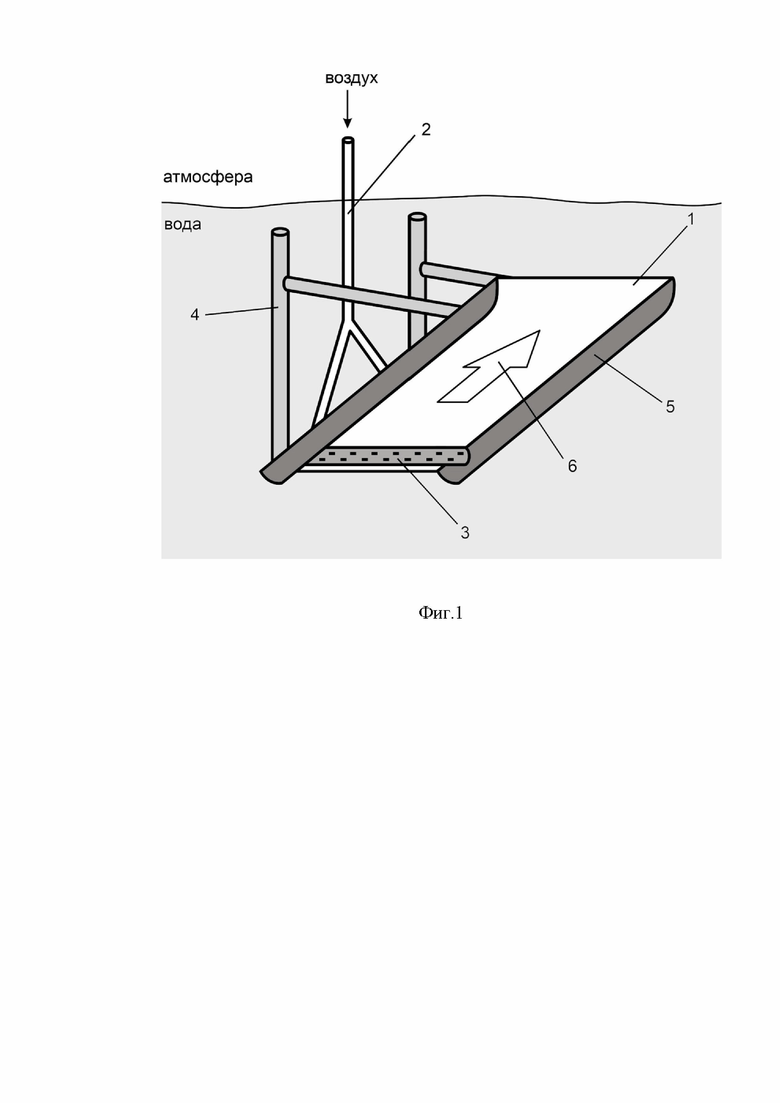
На фиг. 1 представлен общий вид движителя.
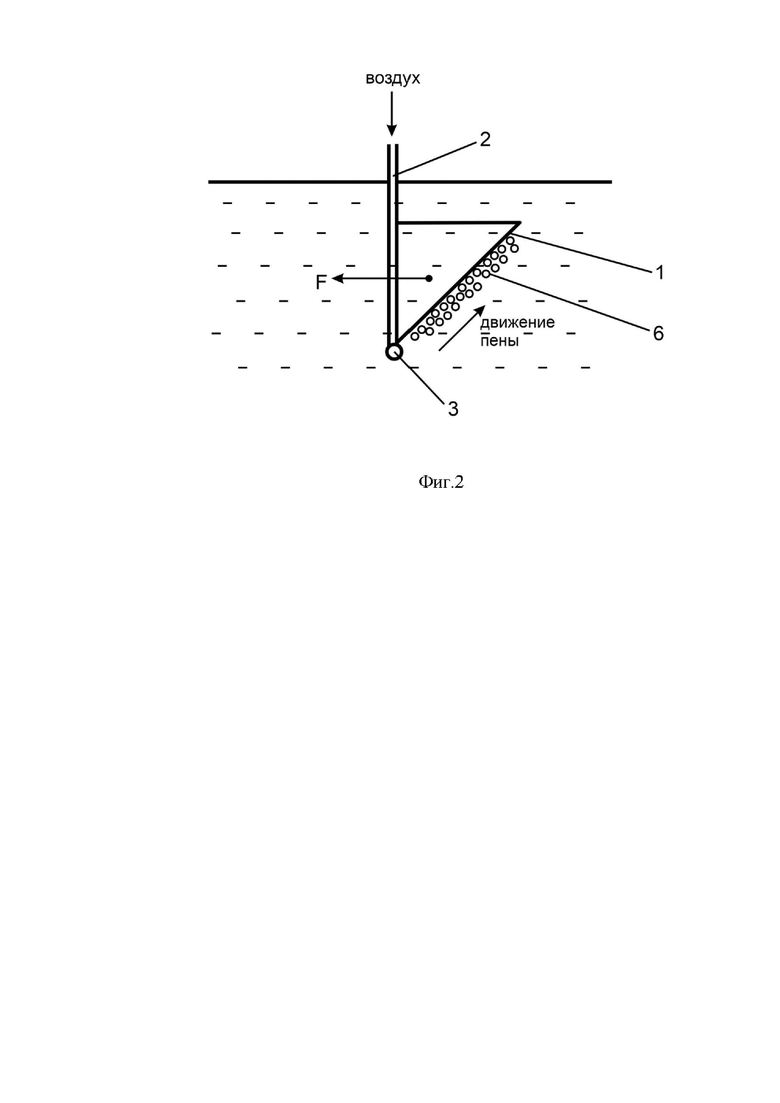
На фиг. 2 представлена схема работы движителя.
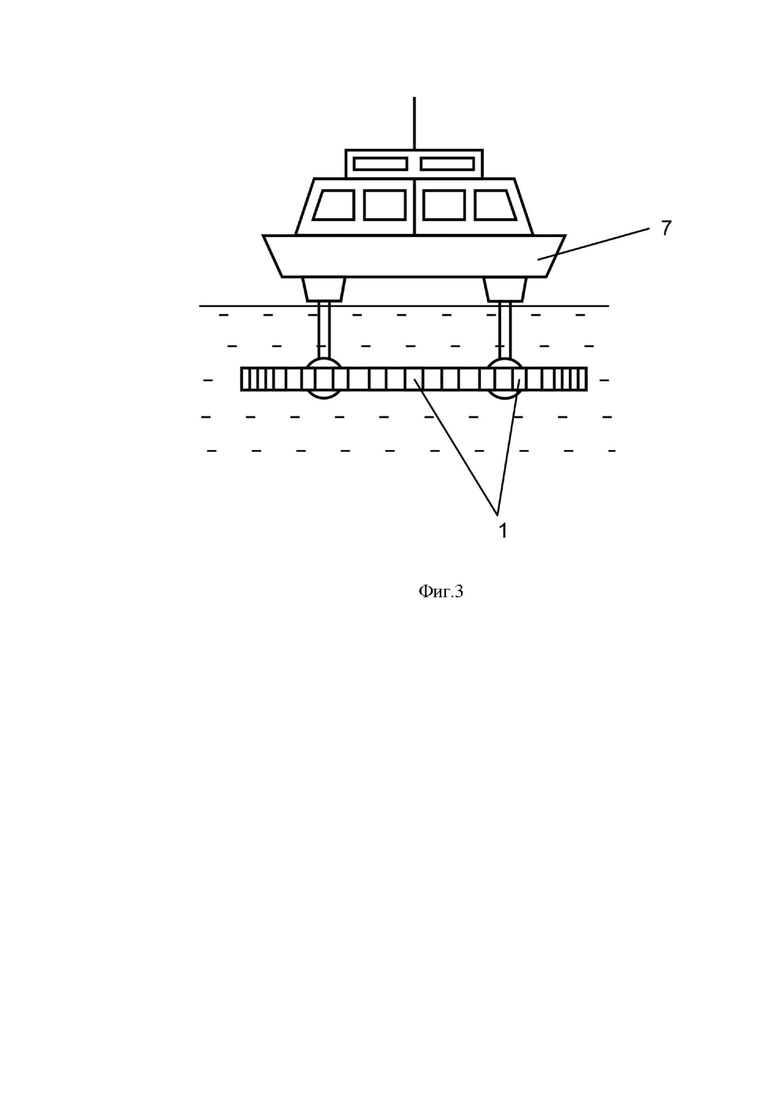
На фиг. 3 представлен общий вид платформы с установленными движителями для коррекции месторасположения.
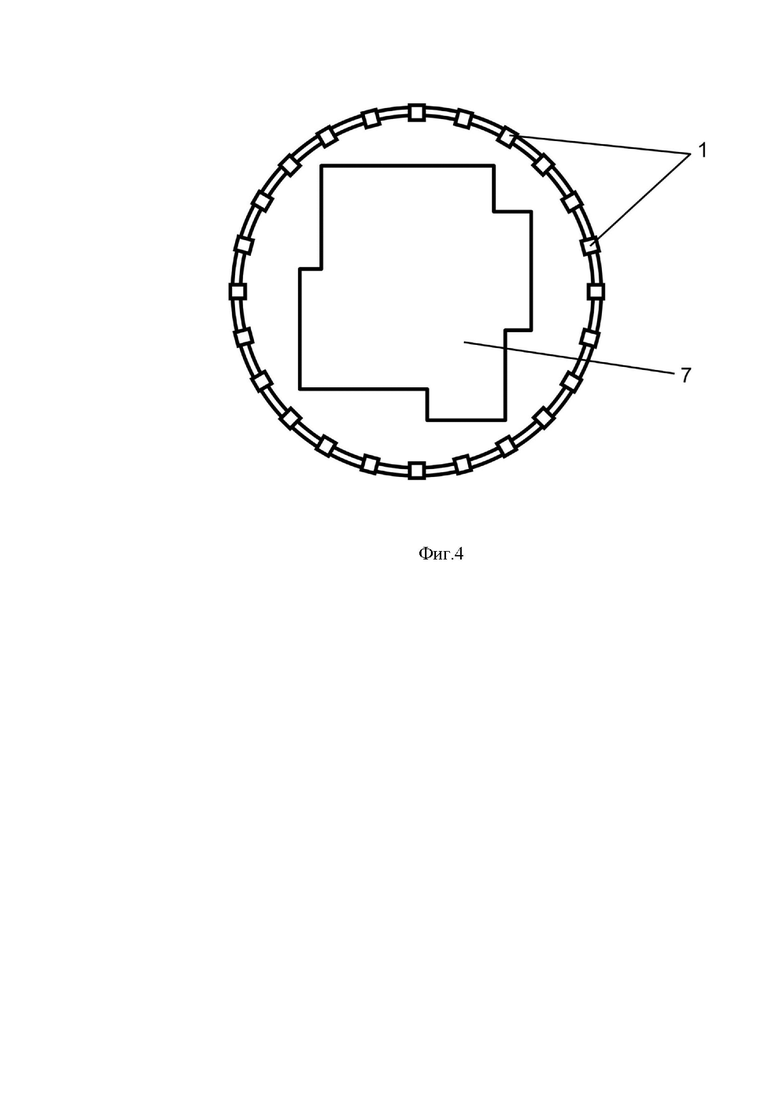
На фиг. 4 представлена схема установки движителей на платформе со сложным периметром подводной части.
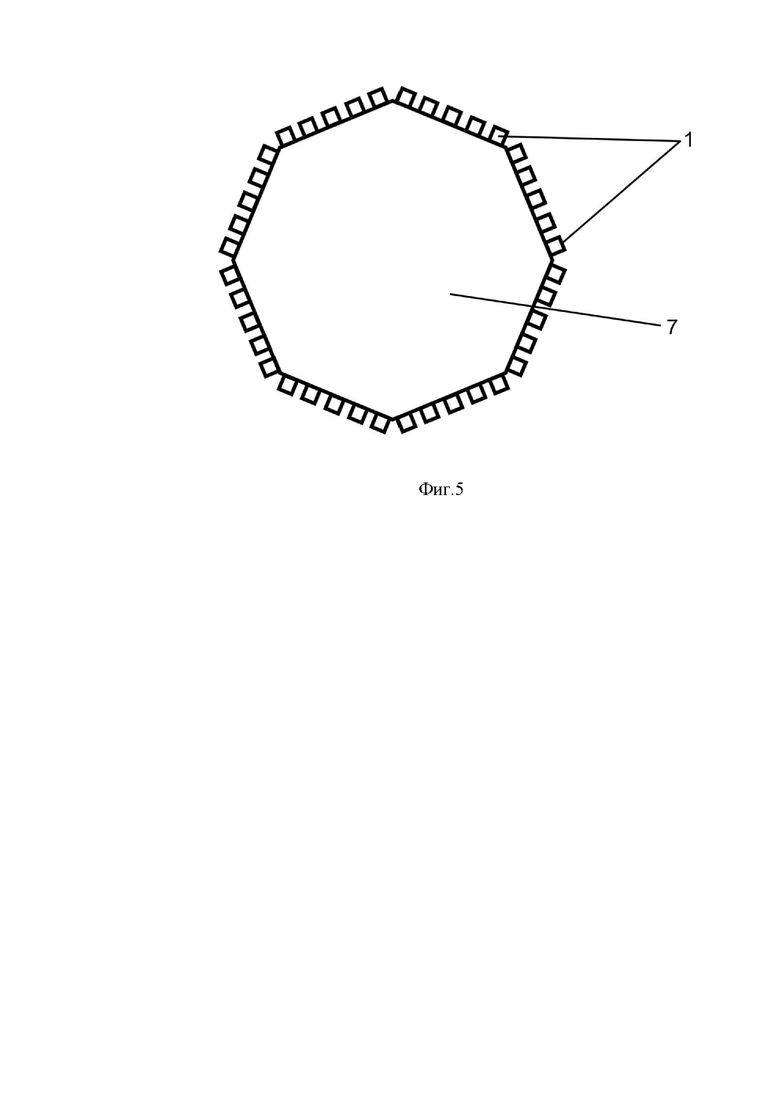
На фиг. 5 представлена схема установки движителей на платформе с простым периметром подводной части.
На фигурах обозначено: 1 - плоскость движителя, 2 - воздушный канал, 3 - форсунка, 4 - стойки крепления, 5 - ограничитель потока пены, 6 - поток пены, 7 - платформа (плавучее средство).
Каждый движитель содержит рабочую наклонную плоскость 1, выполненную в виде прямоугольной пластины и наклоненную к горизонтальной плоскости под некоторым углом (угол настраивается индивидуально, обычно от 30 до 60 градусов). У нижней грани пластины закреплена форсунка 3 для создания из воздуха и воды мелкодисперсной пены. Форсунка представляет собой трубку диаметром 10-20 мм с большим числом отверстий (60-90) диаметром до 0,1 мм, а длина ее составляет 90-95% ширины пластинки. В форсунку 3 через канал 2 подается сжатый воздух, который выходит через отверстия в форсунке с образованием пены. Для повышения эффективности и устойчивости работы движителя вдоль краев пластины устанавливаются пластинки-ограничители 5 (3-5% от ширины пластины) для удержания движущегося потока жидкости и пены. При этом движитель имеет стойки крепления 4 для фиксации его на плавучем средстве.
Схема работы движителя показана на фиг. 2.
Каждый пузырек воздуха, до соприкосновения с пластиной 1 испытывает действие двух сил: силы Архимеда (действует вверх) и силы Стокса (вязкое сопротивление воды и направлено вниз). При контакте с наклонной плоскостью суммарная сила действует в двух направлениях: горизонтальном и вертикальном. Для задачи управления в горизонтальной плоскости вертикально направленными компонентами можно пренебречь. Так как пузыри поднимаются вверх, то это означает, что сила Архимеда доминирует над силой Стокса, а её горизонтально направленная компонента дает реактивную силу F, направленную в сторону, противоположную уходящему потоку пены. В результате каждый движитель дает импульс F в предписанном горизонтальном направлении пропорциональный силе Архимеда, т.е. объему воздуха, пропущенного форсункой. Суммарный импульс всей совокупности движителей лежит в горизонтальной плоскости и равен векторной сумме импульсов каждого движителя.
Данные движители в количестве 36-48 штук могут быть размещены в одной горизонтальной плоскости вокруг подводной части плавсредства. В частности, на фиг. 3 изображена платформа 7 типа SWATH (Small Waterplane Area Twin Hull) вокруг поплавков которой размещены движители. Воздух во все форсунки движителей подается через индивидуальные управляющие клапаны, связанные с центральным процессором, а источником воздуха могут быть локальные ресиверы или общий баллон с давлением порядка 3-5 атмосфер. Насос, нагнетающий воздух (для большого баллона или локальных ресиверов), может использовать электроэнергию, получаемую от солнечных панелей. Кроме того, подводная часть плавсредства сама может выступать в качестве основы для крепления движителей. Так, в том случае, если подводная часть плавучего средства имеет сложный периметр, то движители могут крепиться на круглом основании (см. фиг. 4), а если подводная часть плавучего средства имеет простой периметр (например, симметричный по двум осям), то движители могут крепиться непосредственно к его подводной части (см. фиг. 5).
Платформа имеет систему точного позиционирования, которая позволяет определять отклонение от заданной точки в каждый момент времени. По этому отклонению компьютерная программа вычисляет управляющий сигнал для каждого движителя. В результате движители передают платформе суммарный импульс, необходимый и достаточный для её возвращения в исходную точку. Компьютерное управление каждым движителем в отдельности, и их свойство легко переключаться, позволяет очень точно управлять суммарным импульсом и корректировать положение плавучего средства.
Таким образом, за счет того, что вокруг подводной части плавучего средства в одной горизонтальной плоскости размещают и жестко закрепляют несколько десятков движителей, использующих для создания реактивной силы энергию сжатого воздуха, который проходит через систему форсунок и уже в виде мелкодисперсной пены воздействует на закрепленную внутри каждого движителя наклонную плоскость, при этом вся совокупность движителей создает реактивную силу, результирующий вектор которой может быть направлен в любом направлении в горизонтальной плоскости, а управление указанными движителями осуществляется посредством компьютерной системы, которая оценивает отклонение от заданной точки и формирует управляющие сигналы для точной коррекции местоположения плавучего средства, при этом управление движителями осуществляется за счет того, что компьютерная система задает абсолютные значения импульса для каждого движителя, которые прямо пропорциональны пропущенному объему воздух, обеспечивается возможность коррекции положения плавучего средства по всей горизонтальной плоскости с большой точностью.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СОЗДАНИЯ КРУТЯЩЕГО МОМЕНТА НА ВАЛУ | 2023 |
|
RU2816858C1 |
| МОБИЛЬНОЕ ПОДВОДНОЕ ХРАНИЛИЩЕ ДЛЯ ЖИДКИХ НЕФТЕПРОДУКТОВ | 2023 |
|
RU2820362C1 |
| ВОЛНОСТОЙКИЙ САМОХОДНЫЙ КАТАМАРАННЫЙ КОМПЛЕКС | 2008 |
|
RU2398705C2 |
| Плавучий пирс | 1990 |
|
SU1770211A1 |
| САМОХОДНАЯ ПОЛУПОГРУЖНАЯ ОКЕАНОЛОГИЧЕСКАЯ ИССЛЕДОВАТЕЛЬСКАЯ ПЛАТФОРМА И СПОСОБ ЕЕ ИСПОЛЬЗОВАНИЯ | 2006 |
|
RU2343084C2 |
| Плавучая платформа, совмещенная с малыми судами на сжатом пневмопотоке | 2021 |
|
RU2835223C2 |
| СПОСОБ ОСУЩЕСТВЛЕНИЯ ПОДЪЕМНО-ТРАНСПОРТНОЙ ОПЕРАЦИИ И ПОДВОДНОЕ СУДНО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2478517C2 |
| СПОСОБ ПЕРЕМЕЩЕНИЯ ВОДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2021 |
|
RU2764312C1 |
| Плавучее волностойкое крановое судно универсального типа | 2018 |
|
RU2712486C2 |
| Способ приведения в движение плавательного средства с подводной частью усечённой формы | 2021 |
|
RU2760353C1 |
Изобретение относится к судостроению и может быть использовано для точного перемещения и коррекции местоположения плавсредств. Способ коррекции местоположения плавучего средства основан на том, что вокруг подводной части плавучего средства размещаются однотипные движители, которые использует энергию сжатого воздуха для создания реактивной тяги, причем все векторы тяги движителей лежат в одной горизонтальной плоскости. Компьютерная система управляет только величиной импульса конкретного движителя, что позволяет быстро сформировать суммарное усилие в любом горизонтальном направлении. Технический результат изобретения заключается в возможности с большой точностью изменять положение плавучего средства по всем направлениям в горизонтальной плоскости. 5 ил.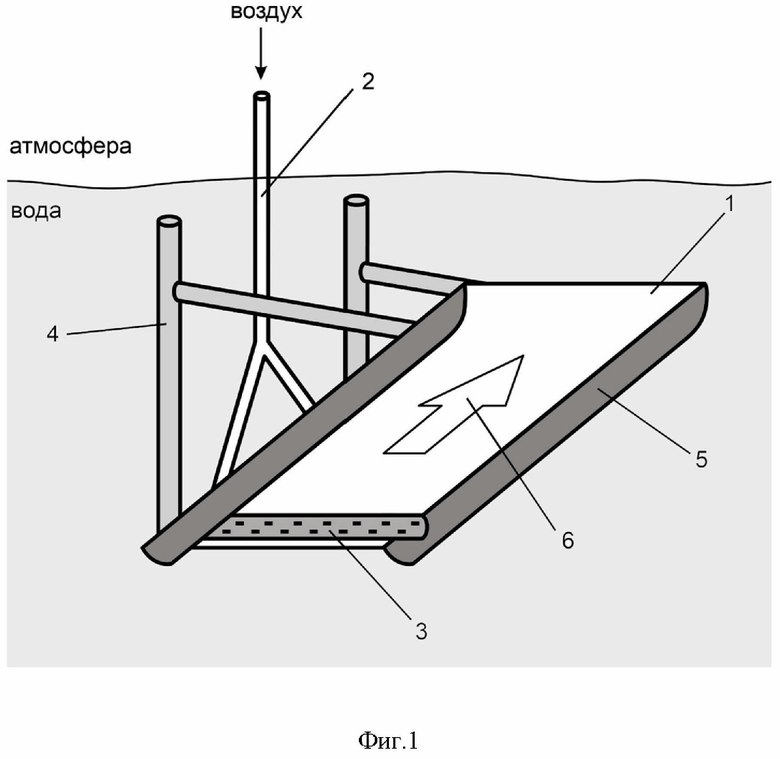
Способ коррекции местоположения плавучего средства, характеризующийся тем, что вокруг подводной части плавучего средства в одной горизонтальной плоскости размещают и жестко закрепляют несколько десятков движителей, использующих для создания реактивной силы энергию сжатого воздуха, который проходит через систему форсунок и уже в виде мелкодисперсной пены воздействует на закрепленную внутри каждого движителя наклонную плоскость, при этом вся совокупность движителей создает реактивную силу, результирующий вектор которой может быть направлен в любом направлении в горизонтальной плоскости, а управление указанными движителями осуществляется посредством компьютерной системы, которая оценивает отклонение от заданной точки и формирует управляющие сигналы для точной коррекции местоположения плавучего средства, при этом управление движителями осуществляется за счет того, что компьютерная система задает абсолютные значения импульса для каждого движителя, которые прямо пропорциональны пропущенному объему воздуха.
| US 6848382 B1, 01.02.2005 | |||
| ВКЛАДНАЯ СТЕЛЬКА ДЛЯ ОБУВИ | 2009 |
|
RU2399356C1 |
| DE 19840078 A1, 16.03.2000 | |||
| US 9446825 B1, 20.09.2016 | |||
| Автоматические весы для сыпучих тел | 1925 |
|
SU2795A1 |
| US 2010294189 A1, 25.11.2010 | |||
| Морская полупогружная платформа | 1990 |
|
SU1705180A1 |

