выполнены и установлены узлы 5-8 проверяемой машины. На каретке 3 образцовой машины закреплен лазерный интерферометр, состоящий из лазера 9, разделяющих призм 10 и 11 и приемного блока 12. По ходу лазера 9 к каретке 3 прикреплена призма 13, отклоняющая луч лазера 9 по оси Z,a к пиноли 4 - отражающая призма 14. По ходу луча в направлении X к порталу 2 прикреплена призма 15, отклоняющая луч по оси Y. Напротив направления луча по оси Y к станине 1 образцовой машины через стойку 16 прикреплен отражатель 17. К порталу 6 проверяемой машины прикреплена призма 18, отклоняющая луч лазера 9 по оси Y, а к станине 5 проверямой машины напротив призмы 18 - отражающая призма 19. К каретке 7 проверяемой машины прикреплены отклоняющая 20 и отражающая 22 призмы,
а к пиноли 8 - отражатель 21. Информация о измерении перемещения и управление приводами (не показаны) подсоединена к ЭВМ 23, а из нее - в регистрирующий прибор 24. Луч лазера 9 проходит систему отражателей 10-13-14-15-16-18-19-20- 21-22-11, закрепленных на подвижных органах образцовой и проверяемой машин, и интерферирует. В случае синхронного перемещения подвижных органов этих машин, путь луча лазера 9 остается постоянным. В случае отклонения величины перемещения проверяемой машины от образцовой появляется разность хода луча лазера и интерферометр показывает двойную погрешность этого перемещения. Знак и величина погрешности перемещения вычисляется в ЭВМ 23, подключенной к регистрирующему прибору 24. 2 ил.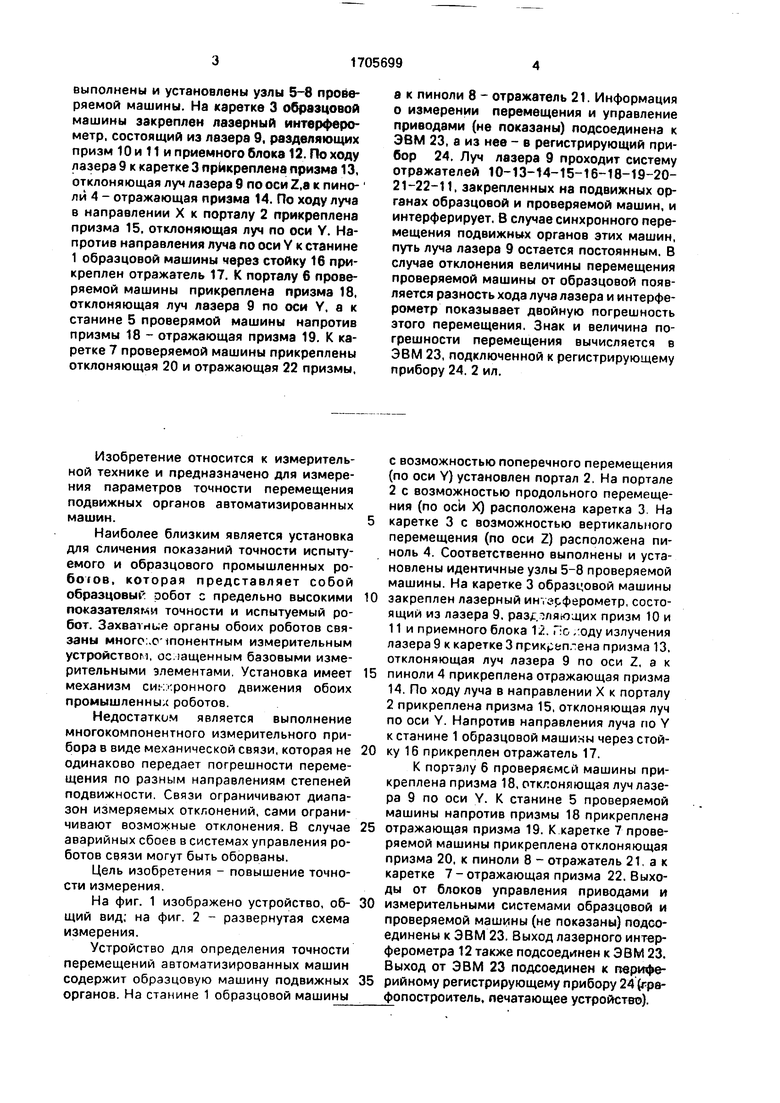
| название | год | авторы | номер документа |
|---|---|---|---|
| Координатная измерительная машина | 1990 |
|
SU1795264A1 |
| ШИРОКОДИАПАЗОННЫЙ КОМПАРАТОР ДЛЯ ПОВЕРКИ И КАЛИБРОВКИ КООРДИНАТНЫХ СРЕДСТВ ИЗМЕРЕНИЙ | 2009 |
|
RU2401985C1 |
| УНИВЕРСАЛЬНЫЙ МЕТРОЛОГИЧЕСКИЙ ГЕОДЕЗИЧЕСКИЙ СТЕНД | 2006 |
|
RU2362978C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ ТОЧЕК ПОВЕРХНОСТИ ИЗДЕЛИЙ | 1990 |
|
SU1795704A1 |
| Интерферометр для измерения перемещений двухкоординатного стола | 1979 |
|
SU861932A1 |
| ПОВЕРОЧНЫЙ КОМПЛЕКС КООРДИНАТНЫХ ПРИБОРОВ И ИЗМЕРИТЕЛЬНЫХ СИСТЕМ | 2012 |
|
RU2494346C1 |
| Способ калибровки мобильных 3D-координатных средств измерений и устройство для его реализации | 2018 |
|
RU2710900C1 |
| Устройство для измерения шага точных винтов | 1980 |
|
SU953452A1 |
| СТЕНД ДЛЯ ПОВЕРКИ И КАЛИБРОВКИ ИЗМЕРИТЕЛЬНЫХ СИСТЕМ "ЦИФРОВОЙ НИВЕЛИР+КОДОВАЯ РЕЙКА" | 2015 |
|
RU2584725C1 |
| Прибор для контроля механизмов подачи станков | 1981 |
|
SU986612A1 |
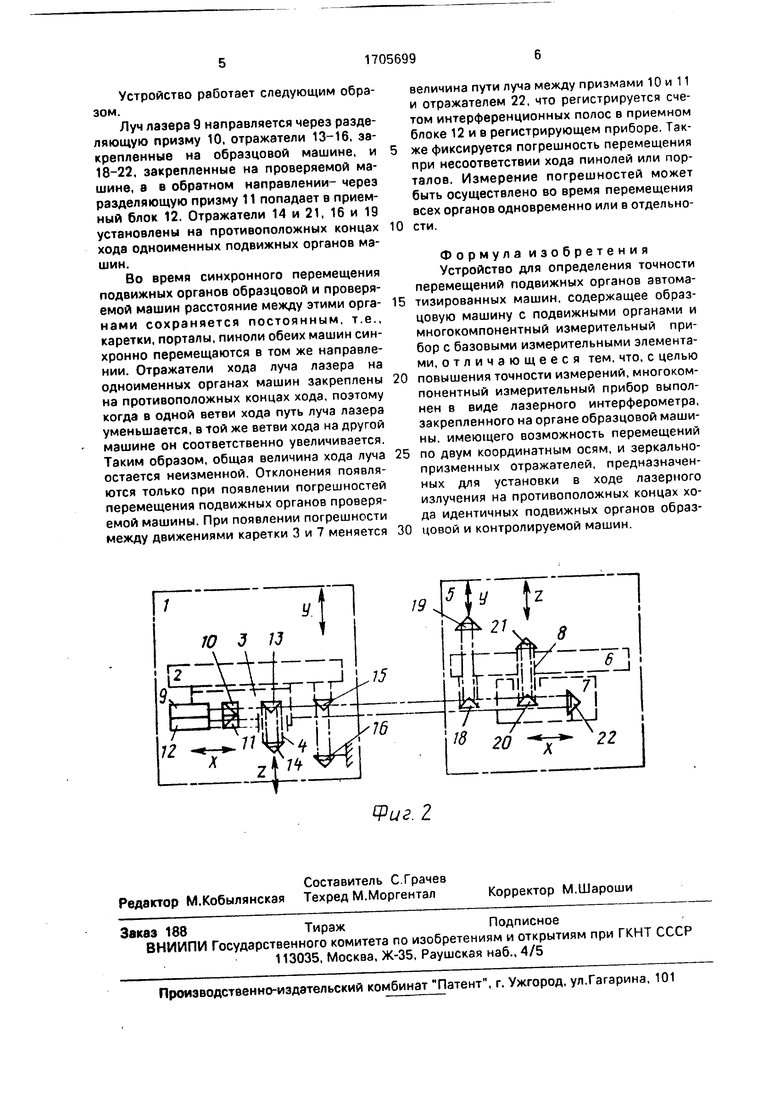
Изобретение относится к измерительной технике. Цель изобретения - повышение точности измерений. На станине 1 образцовой машины с возможностью перемещения по оси Y установлен портал 2. на нем с возможностью перемещения по оси X размещена каретка 3. На каретке 3 по оси Z перемещается пиноль 4. Соответственно - г w fe WW Фи&1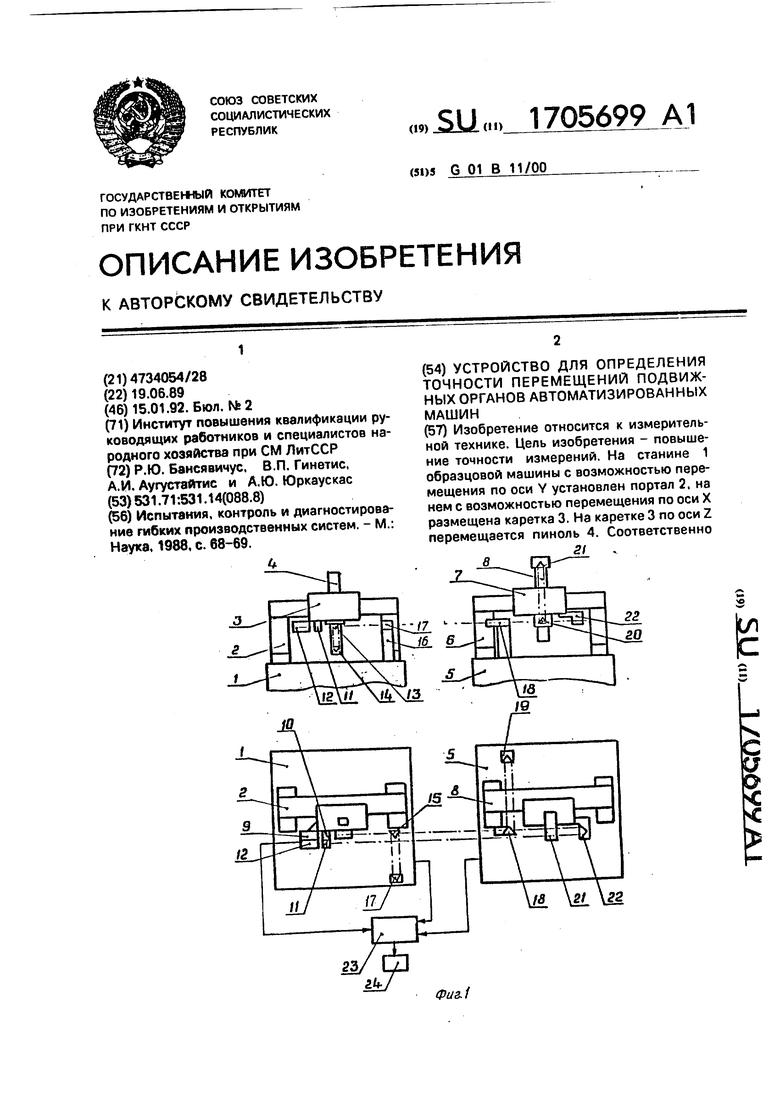
Изобретение относится к измерительной технике и предназначено для измерения параметров точности перемещения подвижных органов автоматизированных машин.
Наиболее близким является установка для сличения показаний точности испытуемого и образцового промышленных ро- богов, которая представляет собой образцовый робот с предельно высокими показателями точности и испытуемый робот. Захватите органы обоих роботов связаны многокомпонентным измерительным устройством, оснащенным базовыми измерительными элементами. Установка имеет механизм синхронного движения обоих промышленных роботов.
Недостатком является выполнение многокомпонентного измерительного прибора в виде механической связи, которая не одинаково передает погрешности перемещения по разным направлениям степеней подвижности. Связи ограничивают диапазон измеряемых отклонений, сами ограничивают возможные отклонения. В случае аварийных сбоев в системах управления роботов связи могут быть оборваны.
Цель изобретения - повышение точности измерения.
На фиг. 1 изображено устройство, общий вид; на фиг. 2 - развернутая схема измерения.
Устройство для определения точности перемещений автоматизированных машин содержит образцовую машину подвижных органов. На станине 1 образцовой машины
с возможностью поперечного перемещения (по оси Y) установлен портал 2. На портале 2 с возможностью продольного перемещения (по оси X) расположена каретка 3. На
каретке 3 с возможностью вертикального перемещения (по оси Z) расположена пи- ноль 4. Соответственно выполнены и установлены идентичные узлы 5-8 проверяемой машины. На каретке 3 образцовой машины
закреплен лазерный интерферометр, состоящий из лазера 9, разделяющих призм 10 и 11 и приемного блока 12. По -:оду излучения лазера 9 к каретке 3 прикрйп-ена призма 13, отклоняющая луч лазера 9 по оси Z, а к
пиноли 4 прикреплена отражающая призма 14. По ходу луча в направлении X к порталу 2 прикреплена призма 15, отклоняющая луч по оси Y. Напротив направления луча по Y к станине 1 образцовой машины через стойку 16 прикреплен отражатель 17.
К порталу 6 проверяемой машины прикреплена призма 18, отклоняющая луч лазера 9 по оси Y. К станине 5 проверяемой машины напротив призмы 18 прикреплена
отражающая призма 19. К каретке 7 проверяемой машины прикреплена отклоняющая призма 20, к пиноли 8 - отражатель 21, а к каретке 7 - отражающая призма 22. Выходы от блоков управления приводами и
измерительными системами образцовой и проверяемой машины (не показаны) подсоединены к ЭВМ 23. Выход лазерного интерферометра 12 также подсоединен к ЭВМ 23. Выход от ЭВМ 23 подсоединен к периферийному регистрирующему прибору 24 (графопостроитель, печатающее устройство).
Устройство работает следующим образом.
Луч лазера 9 направляется через разделяющую призму 10, отражатели 13-16, закрепленные на образцовой машине, и 18-22, закрепленные на проверяемой машине, а в обратном направлении- через разделяющую призму 11 попадает в приемный блок 12. Отражатели 14 и 21, 16 и 19 установлены на противоположных концах хода одноименных подвижных органов машин.
Во время синхронного перемещения подвижных органов образцовой и проверяемой машин расстояние между этими орга- нами сохраняется постоянным, т.е., каретки, порталы, пиноли обеих машин синхронно перемещаются в том же направлении. Отражатели хода луча лазера на одноименных органах машин закреплены на противоположных концах хода, поэтому когда в одной ветви хода путь луча лазера уменьшается, в той же ветви хода на другой машине он соответственно увеличивается. Таким образом, общая величина хода луча остается неизменной. Отклонения появляются только при появлении погрешностей перемещения подвижных органов проверяемой машины. При появлении погрешности между движениями каретки 3 и 7 меняется
величина пути луча между призмами 10 и 11 и отражателем 22, что регистрируется счетом интерференционных полос в приемном блоке 12 и в регистрирующем приборе. Также фиксируется погрешность перемещения при несоответствии хода пинолей или порталов. Измерение погрешностей может быть осуществлено во время перемещения всех органов одновременно или в отдельности.
Формула изобретения Устройство для определения точности перемещений подвижных органов автоматизированных машин, содержащее образцовую машину с подвижными органами и многокомпонентный измерительный прибор с базовыми измерительными элементами, отличающееся тем, что. с целью повышения точности измерений, многокомпонентный измерительный прибор выполнен в виде лазерного интерферометра, закрепленного на органе образцовой машины, имеющего возможность перемещений по двум координатным осям, и зеркально- призменных отражателей, предназначенных для установки в ходе лазерного излучения на противоположных концах хода идентичных подвижных органов образцовой и контролируемой машин.
1
| Испытания, контроль и диагностирование гибких производственных систем | |||
| - М.: Наука, 1988, с | |||
| Способ получения смеси хлоргидратов опийных алкалоидов (пантопона) из опийных вытяжек с любым содержанием морфия | 1921 |
|
SU68A1 |
