Изобретение относится к измерительной технике и может быть использовано для измерения формы и размеров поверхностей технологической оснастки и деталей точного машиностроения.
Известны измерительные роботы, содержащие манипулятор, блок управления, электромеханические приводы и датчики измерения линейных и угловых перемещений. Известные измерительные роботы имеют невысокую точность измерений, как правило, точность измерений определяется погрешностью позиционирования, которая составляет для большинства измерительных роботов порядка ±(0,2-0,4) мм. Это ограничивает перемещение измерительных роботов в точном машиностроении.
Наиболее близкое по назначению и технической сущности, принятое в качестве прототипа, является устройство для измерения перемещений по трем координатам, содержащее основание, базовую раму, выполненную в виде труб и скрепленную с основанием, не менее трех интерференционных измерителей перемещений, шарнирно скрепленных с базовой рамой, платформу с измерительным наконечником, установленную на основании с возможностью перемещения по трем координатным осям параллельно самой себе, отражатели, количество которых равно количеству измерителей и оптически связанные с существующими измерителями, телескопические трубы по числу отражателей, установленные между соответствующими отражателями и измерителями так, что одна из сторон скреплена с соответствующим отражателем, а другая с соответствующим измерителем. Известное устройство обладает существенным недостатком - не обеспечивает необходимую точность измерений, так как расстояние от плоскости платформы до объекта измерения всегда будет меняться, что не обеспечит точность измерения.
Целью изобретения является повышение точности устройства для измерения координат точек поверхности изделий.
Указанная цель достигается тем, что устройство, содержащее измерительный робот, блок управления роботом, измерительный щуп, блок обработки информации и не менее трех датчиков перемещений, каждый из которых выполнен в виде лазерного интерферометра, шарнирно закрепленного на опорном элементе и механически связанного со своим уголковым отражателем через полые телескопические стержни, снабжено дисками, соосно установленными на головке робота с возможностью вращения вокруг ее вертикальной оси, отражатель одного из интерферометров жестко соединен с измерительным щупом и установлен на головке робота с возможностью перемещения по оси, совпадающей с осью вращения дисков, отражатель каждого из остальных интерферометров жестко скреплен с соответствующим диском. Устройство позволяет осуществить измерение координат точек поверхности методом трилатерации, т.е. таким методом, в котором положение измерительного узла, в данном случае головки робота, производится путем непосредственного измерения расстояний до нее из трех точек пространства. Это обеспечивает более высокую точность измерения.
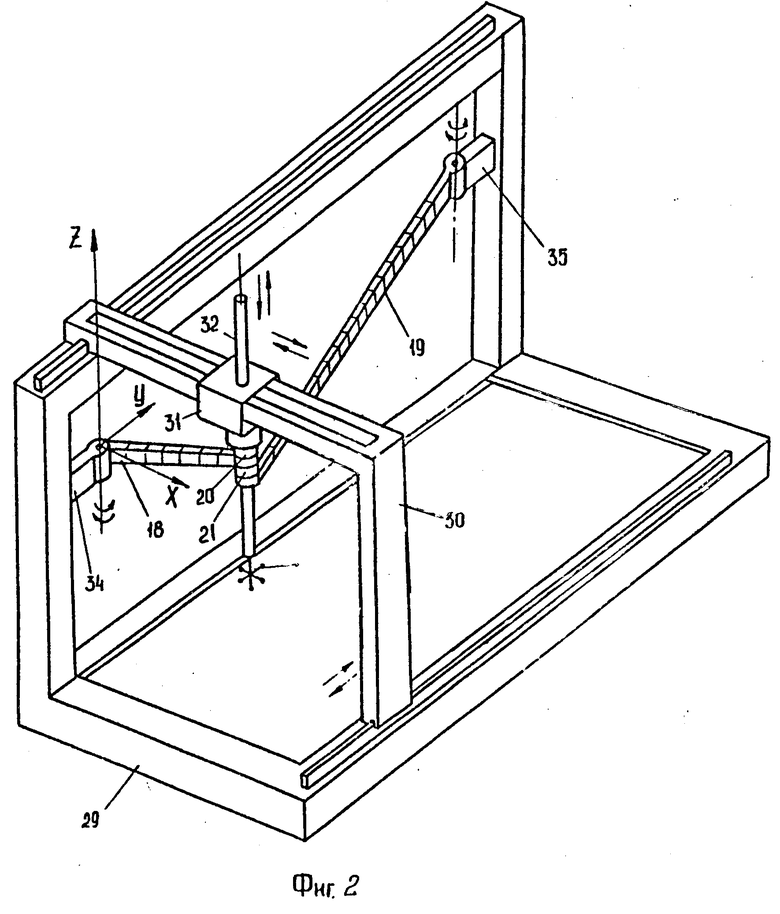
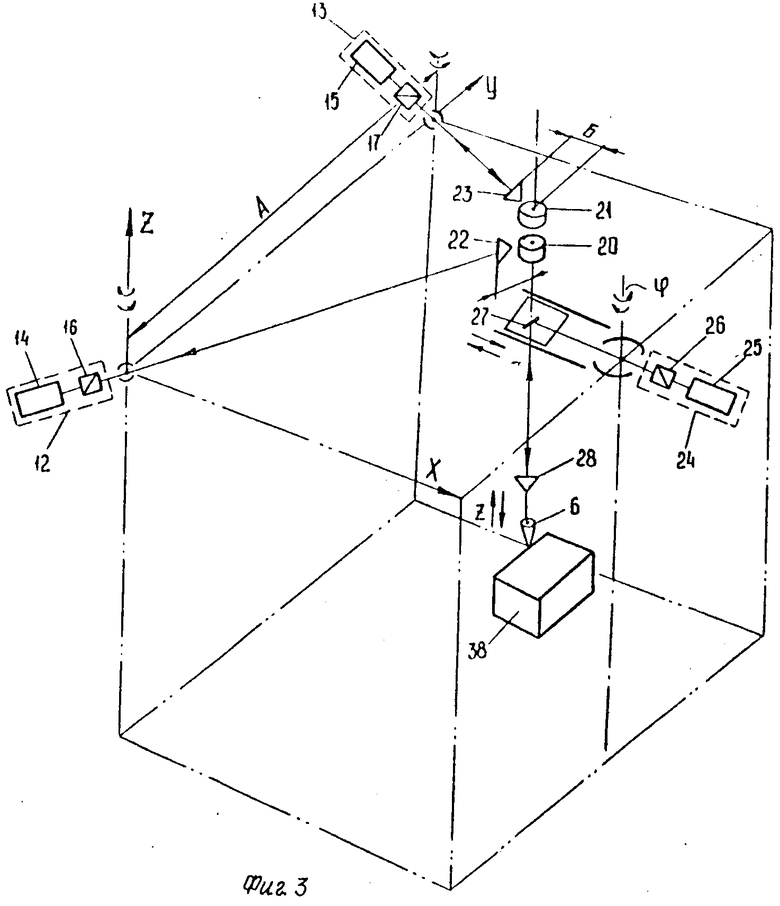
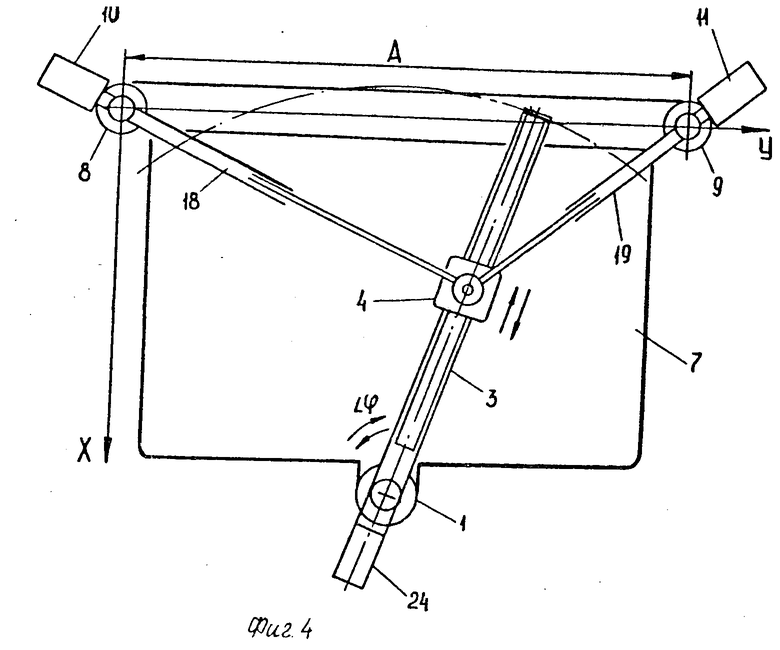
На фиг. 1 изображено устройство, осуществленное на базе робота консольного типа; на фиг. 2 - то же, план; на фиг. 3 - возможный вариант реализации технического решения на базе робота полупортальной схемы; на фиг. 4 - структурная оптическая схема варианта технического решения, приведенного на фиг. 1; на фиг. 5 - конструкция дисков с отражателями интерферометров, закрепленных неподвижно на головке робота.
Устройство содержит робот 1, состоящий из корпуса 2, на котором закреплена консоль 3, способная вращаться вокруг корпуса 2 и несущая головку робота 4, которая способна перемещаться вдоль консоли 3. В головку робота 4 встроена полая пиноль 5, имеющая возможность вертикального перемещения и несущая на конце измерительных щуп 6. Робот 1 снабжен электрическими приводами (на чертеже не показаны): углового (ϕ) перемещения консоли 5, линейного перемещения R головки робота 4 и пиноли 5 по оси Z, а также блоком управления роботом (на чертеже не показан). Через базовую плиту 7 робот 1 соединен с двумя опорными колоннами 8 и 9, на которых шарнирно закреплены датчики перемещений 10 и 11, конструктивно выполненные в виде лазерных интерферометров 12 и 13, содержащих стабилизированные по частоте лазеры 14 и 15, оптические делители 16 и 17 и другие оптико-электронные узлы, обеспечивающие работу интерферометров. Лазерные интерферометры 12 и 13 соединены посредством полых телескопических стержней 18 и 19 с дисками 20 и 21, соосно закрепленными на головке робота 4 с возможностью вращения вокруг ее вертикальной оси. На дисках 20 и 21 жестко закреплены отражатели интерферометров 22 и 23, способные оставаться параллельными к входным граням оптических делителей 16 и 17 при перемещении головки робота 4. На консоли 3 закреплен третий интерферометр 24, состоящий из стабилизированного лазера 25, оптического делителя 26 и других оптико-электронных узлов. Интерферометр 24 через зеркало 27 оптически связан с отражателем 28, жестко закрепленным со щупом 6.
На фиг. 3 показан второй возможный вариант осуществления изобретения на базе робота полупортальной схемы, не изменяющей сущность изобретения.
Устройство содержит каркас 29, на котором расположен полупортал 30, способный перемещаться по направляющим вдоль оси Х. На полупортале 30 закреплена головка робота 31, способная перемещаться вдоль оси Х и пиноль 32, несущая щуп 33 и способная перемещаться вдоль оси Z. На каркасе 29 жестко закреплены кронштейны 34 и 35, на которых шарнирно установлены лазерные интерферометры (на фиг. 3 не показаны), соединенные посредством полых телескопических стержней 18 и 19 (фиг. 3) с дисками 20 и 21, соосно закрепленными на головке робота 31 и способными свободно вращаться вокруг ее вертикальной оси. На дисках 20 и 21 жестко закреплены отражатели интерферометров 22 и 23, способными оставаться параллельными к выходным граням оптических делителей 16 и 17 при перемещении головки робота 31. Полые телескопические стержни 18 и 19 могут быть выполнены в виде скручивающейся на барабане широкой ленты (не показаны).
Интерферометры 12, 13 и 24 электрически соединены с блоком обработки информации 36, выполненным в виде персональной ЭВМ, с печатающим устройством 37 и с блоком управления роботом (не показан).
Устройство работает следующим образом.
На базовую плиту 7 устанавливают объект измерения 36. Включают электрическую сеть интерферометры 12, 13 и 24. Введя в блок управления роботом программу, задают перемещения головке робота 4, отвечающие характеру процесса измерения. При этом, диски 20 и 21, следя за перемещением головки робота 4, ориентируют отражатели 22 и 23 параллельно входным граням оптических делителей 16 и 17. В процессе перемещения головки робота 4 с интерферометров 12 и 13 поступает в ПЭВМ 36 информация о расстояниях оси головки робота 4 до интерферометров 12 и 13 (в плоскости Х и Y) и с интерферометра 24 (в момент контакта щупа с контролируемым объектом 38) - координата Z. ПЭВМ 36 перерабатывает информацию в плоскости Х, Y по известным геометрическим зависимостям
I12=x2+y2
I22=x2+(A-y)2 , где I1 и I2 - расстояние от оси головки робота 4 до интерферометров 12 и 13;
А - фиксированное расстояние между осями шаровых опор интерферометров 12 и 13.
Информация о координатах точек поверхности Х, Y и Z отображается на дисплее ПЭВМ 36 и печатается принтером 37. Кроме того, в процессе перемещения головки робота 4 интерферометр 24 при верхнем неподвижном положении пиноли 5 выдает информацию о расстояниях от вертикальной оси корпуса 2 робота до вертикальной оси головки робота 4, которая при обработке в ПЭВМ36 корректирует показания интерферометров на погрешность возможных отклонений отражателей 22 и 23 от параллельного расположения их относительно выходных граней оптических делителей 16 и 17.
Применение предложенного устройства обеспечит повышение точности измерения объектов контроля и качества продукции.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРЕХКОМПОНЕНТНЫЙ ЛАЗЕРНЫЙ ИЗМЕРИТЕЛЬ МИКРОПЕРЕМЕЩЕНИЙ ОБЪЕКТА | 2008 |
|
RU2383854C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ФОРМЫ ПОВЕРХНОСТИ | 1990 |
|
SU1708053A1 |
| Трехкоординатный лазерный измеритель перемещений объектов | 1988 |
|
SU1781536A1 |
| КООРДИНАТНОЕ ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 1990 |
|
SU1795699A1 |
| Координатная измерительная машина | 1990 |
|
SU1795264A1 |
| Измерительное устройство | 1989 |
|
SU1714321A1 |
| Устройство для многоточечного контроля геометрии сложного профиля | 2024 |
|
RU2825540C1 |
| Метрологический стенд по поверке, калибровке уровнемеров и сигнализаторов уровня | 2018 |
|
RU2690701C2 |
| СПОСОБ ИЗМЕРЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ПОВЕРХНОСТЕЙ СЛОЖНОПРОФИЛИРОВАННЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2243503C2 |
| Устройство для определения точности перемещений подвижных органов автоматизированных машин | 1989 |
|
SU1705699A1 |

Изобретение относится к измерительной технике и может быть использовано для измерения формы и размеров поверхностей технологической оснастки и деталей точного машиностроения. Цель изобретения - повышение точности измерения. Устройство содержит робот 1, состоящий из корпуса 2, на котором закреплена консоль 3, несущая головку 4 робота 1. В головку 4 робота 1 встроена полая пиноль 5, несущая на конце измерительный щуп 6. Через базовую плиту 7 робот 1 соединен с двумя опорными колоннами 8 и 9, на которых шарнирно закреплены датчики перемещений 10 и 11, конструктивно выполненные в виде лазерных интерферометров, соединенные с помощью полых телескопических стержней 18 и 19 с дисками 20 и 21, соосно укрепленными на головке 4 робота 1 с возможностью вращения вокруг ее вертикальной оси. На дисках 20 и 21 жестко закреплены отражатели интерферометров, способные оставаться параллельными к выходным граням оптических делителлей при перемещении головки робота 4. На консоли 3 закреплен третий интерферометр, оптически связанный с отражателем и жестко закрепленный со щупом 6. Положительный эффект: повышение точности измерения объектов контроля и качества продукции. В процессе перемещения головки 4 с интерферометров в ПЭВМ 36 поступает информация о расстояниях головки 4 до интерферометров (в плоскости XY) и с интерферометра 24-координата Z (в момент касания щупа 6 с контролируемым объектом). Устройство измеряет координаты точек поверхности методом трилатерации, что обеспечивает повышение точности измерения. 5 ил.
УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ ТОЧЕК ПОВЕРХНОСТИ ИЗДЕЛИЙ, содержащее измерительный робот, блок управления роботом, измерительный щуп, блок обработки информации и не менее трех датчиков перемещений, каждый из которых выполнен в виде лазерного интерферометра, шарнирно закрепленного на опорном элементе и механически связанного со своим уголковым отражателем через полые телескопические стержни, отличающееся тем, что, с целью повышения точности измерений, оно снабжено дисками, соосно установленными на головке робота с возможностью вращения вокруг ее вертикальной оси, отражатель одного из интерферометров жестко соединен с измерительным щупом и установлен на головке робота с возможностью перемещения по оси, совпадающей с осью вращения диска, отражатель каждого из остальных интерферометров жестко скреплен с соответствующим диском.
| Управляющее устройство для теневого проецирования движущейся модели местности | 1987 |
|
SU1427410A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
