3
ел
00
(
цилинд;;и ских держателей в виде подвижных 4 и неподвижных 5 штифтов, исполнением .: 1 управления в виде стер.ч-:ня круглого сеченая, а корпуса 3 -- цилиндрическим, закреплением стержня в корпусе 3 гибкой мембраной 2, особым расположением держателей на одинаковом расстоянии от мембраны 2 о дкух плоскостях, а также особой намоткой проволочных тензорези- стороо G и их охлючением о мосты постоянного тоха. 4 ил., 1 табл.

| название | год | авторы | номер документа |
|---|---|---|---|
| Телеграфный ключ | 1987 |
|
SU1436142A1 |
| Устройство для ввода информации | 1986 |
|
SU1361535A1 |
| ВЫСОКОТЕМПЕРАТУРНЫЙ ПОЛУПРОВОДНИКОВЫЙ ПРЕОБРАЗОВАТЕЛЬ ДАВЛЕНИЯ НА ОСНОВЕ СТРУКТУРЫ "ПОЛИКРЕМНИЙ-ДИЭЛЕКТРИК" | 2012 |
|
RU2531549C2 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ СТАТО - ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ФИЗИЧЕСКИХ ОБЪЕКТОВ | 2013 |
|
RU2562445C2 |
| ПОЛУПРОВОДНИКОВЫЙ ПРЕОБРАЗОВАТЕЛЬ ДАВЛЕНИЯ | 2013 |
|
RU2537517C1 |
| УНИВЕРСАЛЬНЫЙ МОДУЛЬ ЧАСТОТНОГО ИНТЕГРИРУЮЩЕГО РАЗВЁРТЫВАЮЩЕГО ПРЕОБРАЗОВАТЕЛЯ ДЛЯ ДАТЧИКОВ ФИЗИЧЕСКИХ ВЕЛИЧИН | 2016 |
|
RU2631494C1 |
| СШИВАЮЩИЕ РЕАГЕНТЫ И ИХ ПРИМЕНЕНИЕ | 2009 |
|
RU2503687C2 |
| Координатное устройство управления цветом | 1987 |
|
SU1648520A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДАВЛЕНИЯ | 1993 |
|
RU2139509C1 |
| Устройство для измерения составляющих векторов аэродинамической силы и момента | 2017 |
|
RU2657340C1 |
Изобретение относится к вычислительной технике, в частности к устройствам для ввода информации в ЭВМ, и может быть использовано для свода координатной, графической, текстовой информации, а также может найти применение в системах автоматики и телемеханики для дистанционного управления объектами. Целью изобретения является расширение области применения устройства зэ счет увеличения объема вводимой информ&ции и увеличения чувствительности к управляющему воздействию. Поставленная цель достигается введением
Изобретение относится к вычислительной технике, в частности к устройствам ручного информации в вычислительные системм, и может быть использовано для ввода координатной, графической и текстовой информации.
Извести.) устройство для евода информации, содержащей рукоятку двухкоорди- натного переключателя шарового типа, преобразующего телесный угол поворота рукоятки во вращательное движение перпендикулярно установленному подвесу, шторки с диафрагменными отверстиями, систему светодиодов и источников света.
К недостаткам устройства следует отнести наличие сложного механического узла, обладающего инерционностью, люфтами, что влияет на точность и скорость ввода информации. Кроме того, вводимая информация описывается только двумя координатами.
Известие устройство для всода информации, содержащее стержень подпружиненною рычага управления с двумя группами контактов, связанных с рычагом управления л его шарниром.
Недостатками этого устройства являются ниская скорость авода информации, связанная со свободными ходами рычага управления, ограниченный объем вводимой информации, обусловленный ограниченным количеством электрически/; контактов. Контакты обладают низкими эксплуатационными характеристиками.
Наиболее близким к предлагаемому по технической сущности и достигаемому результату я ел:,8, оя устройство для ваода ин- формЕции, содержащее корпус, рычаг управления, выполненный в аиде защемленном в корпусе балки с четырьмя взаимно перпендикулярным жертсенными ребрами, на которых расположены проволочные тензорззисторы, включенные во взаимно противоположные плечи двух мостов постоянного тока, ня лицевой сторон-э корпуса закреплена с информационными сиг волами.
К недостатками этого известного устройства следует отнести ограниченное количество вводимой информации, обусловленное тем, что устройство работает о одной плоскости (перпендикулярной оси рычага управления), жесткость рычага управления
неравномерна в различных направлениях нажатия, что вызывает неравномерность выходного электрического сигнале при одинаковом усилии нажатия на руч%/.у управления в различных направлениях, чго
приводит к низкой чувствительности и усилению нажатия. Кроме того, для получения максимально возможного выходного сигнала (ограниченного упругой деформацией тензорезисторос) требуется относительно
большое усилие для преодоления жесткости рычага и его ребер.
Цель изобретения - расширение обл э- сти применения устромстез за счет увеличения объема вводимой информации и
увеличения чувствительности к управляющему воздействию.
Поставленная цель достигается введением цилиндрических держателей в устрой- CTto для взодэ информации, содержащее
корпус, на лицевой стороне которого закреплена шкала с информационными символами, рычаг управления и тензодатчики на проволочных тензорезисторэх, выполнением рычага управления в виде стержня
круглого сеченил, а корпуса - цилиндрическим, закреплением стержня в корпусе гибкой мембраной, особы.-i рзспо.-юхением цилиндрических дерлателей на одинаковом расстоянии от гибкой мзмбраны и двух плоскостях, а также особой намоткой проволочных тенэорезистороа и их включением в мосты постоянного тока.
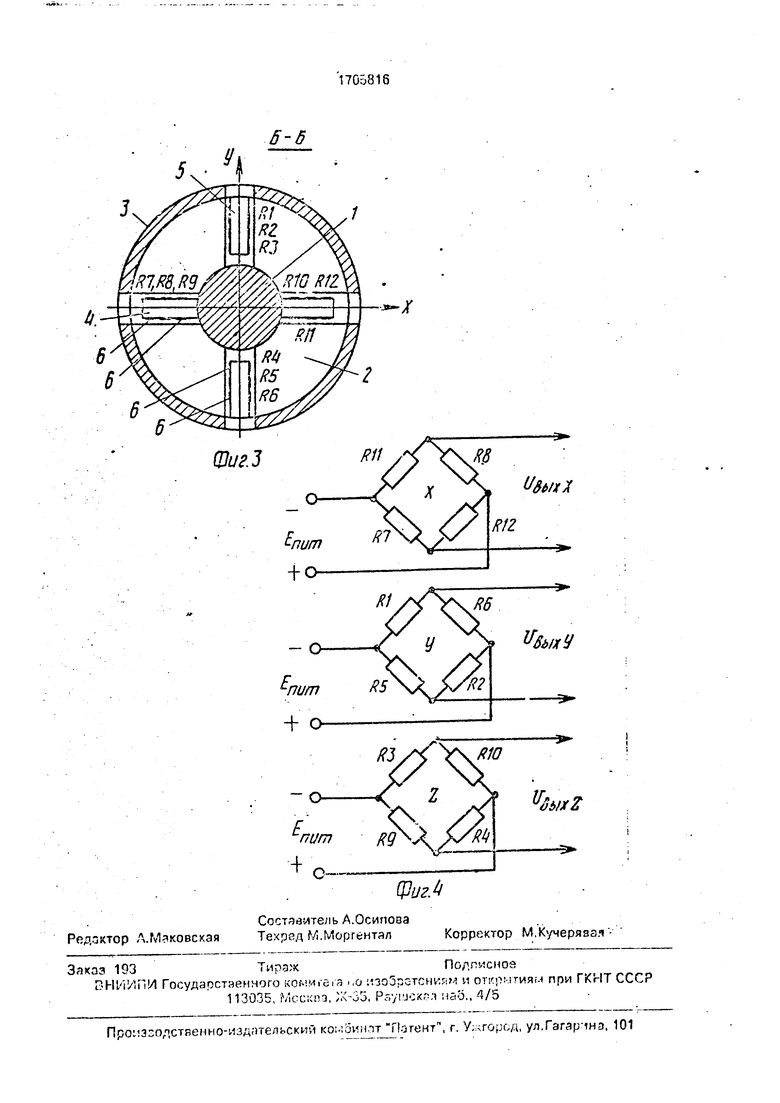
Ча фиг.1 представлена конструкция устройства; на фиг.2 - разрез А-А на фиг.1; на
фиг,3-разрез В -Б из фиг.1; на фиг.4- схема вч - очеимя теизоргглстороБ в мосты постоянного тока.
Устройство (фиг.1) содержит подои ясный рычаг 1 управления о виде стержня
круглого сечения, который посредством гибкой момбраны 2 соединен с корпусом 3, выполненным цилиндрическим. На рычаге 1 на одинаковом р-- -Стояи;:и с дг/х сторон о двух плоскостях от мембраны 2 yKpenfleiitJ
по два цилиндрических дчржзпеля в вг.де подвижных штифтов 4. На корпусе устройства, на том же расстоянии от мембраны 2 укреплены по два цилиндрических делателя D виде неподвижных штифтов 5. Между подвижными 4 и неподвижными 5 штифтами вдог.ь рычага 1 намотаны по три прополочных тензодэтчика в виде тенгоре- зисторов 6 (на фчг.2-4 текзорезисторы 6 обозначены R1-R12). Темзорезисторм включены в плечи трех мостов постоянного тока. На лицевой стороне корпуса закреплена шкала 1 с информационными символами.
Штифтн 4, расположенные с одной стороны от мембраны 2, находятся под углом 90° по отношению к подвижным штифтам 4 с другой стороны, что позволяет расположить с противоположных сторон от мембраны 2, напротив подвижных 4 неподвижные штифты 5. Подвижные 4 и неподвижные 5 штифты, расположенные с одной стсрок.и от мембраны 2, находятся под углом 90° один к другому по той же причине. Таким образом, с каждой стороны от мембраны 2 подвижные 4 и неподвижные 5 штифты расположены ортогонально, что соответствует располсх:сни:о осей коорпмнат X и Y (фиг.2,
3).
Устройство работает следующим обрз- зом.
В исходном состоянии усилие к рычагу 1 не приложено, все прооолочные тензоре- зисторы б (R1-R12, фиг.2) намотаны с одинаковым натягом и имеют одинаковое электрическое сопротивление (далее - сопротивление). При это мосты постоянного тока сбалансированы, выходные напряжения на их выходах отсутствуют (выходной сигнал равен нулю Unwx.x О, UBWX.Y О, UBWX.Z 0),
Рассмотрим работу устройства на примере ввода координатной информации при, перемещении рычага 1 в пределах 360° (в направлениях X, -X; Y, -Y; -М, М; -К, К, фиг.2), при нажатии на рычаг 1 только в вертикальном направлении, а также при одновременном нажатии на рычаг 1 в вертикальном направлении и перемещении рычага 1 в указанных направлениях в горизонтальной плоскости.
Работа устройства поясняется таблицей.
При перемещении рычага 1 в горизонтальной плоскости (перпендикулярно оси рычага-1 управления) в направлении определенного символа, например +Х, происходит перемещение верхнего конца рычага 1 управления R сторот нажатия, а нижнего ого конца - в противоположную. Так KJS при этом расстояние между подвижными и ье0 подписными штифтами 4 и 5 изменяется, происходит дополнительное оастяжение или сжатие (в пределах упругих деформаций) намотанных с предварительным натягом проволочных тензорезисторов 6,
5 причем Тензорезисторы R7--R9 (фиг.З) сжимаются, аТензорезисторы R10-R12 растягиваются. Так кэк тонзорезистори R7-R9 сжимаются, то их сопротивление уменьшается (М - меньше, см. таблицу), а тен орези- сторы R10-R12 растягиваются и увеличивают свое сопротивление (Г больше). Тензорезистсры R11, R12 и R7, R8 включены соответственно в противоположные плечи моста X. Увеличение сопротивления тензорезисторовR11, R12и уменьшение R7, R8 приводит к появлению на выходе (верхнем по схеме, см. фмг.4а) моста постоянного тока сигнала положительной полярности ( в таблице). Тензорезисторы R1 -R3 и R40 R6 находятся п плоскости миним шьного перемещения и сопротивление п них не изменяется (О в таблице), эти тензорззи- стопы включены соответствующим образом в плечи моста Y (фиг.46). Из выходе моста
5 Y выходной сигнал также- будет равен нулю.
Тензорезисторы R3, R4, R9. R10, включенные в мост Z (фиг.4в), при это1-, работают следующим образом: R9 сжимается и
0 уменьшает свое сопротивление (М). R10 растягивается и увеличивает свое сопротивление (Б), a R3 и R4 находятся вне плоскости деформации и сопротивление не изменяют (0). Тензорезисторы R9 и Р10(котор( с- изме5 няют сзое сопротивление) включены в противоположные плечи моста Z, изменяют свое сопротивление одновременно и на одинаковую величину, компенсирую друг друга; R3 и R4 остаются постоянными. В .
0 результате баланс моста Z не нарушается, сигнал на выходе моста равен нуг.ю.
Таким образом, при нажатии ча рычаг 1 в сторону символа +Х на выходах трех -мостов появляются выходные сигналы : поло5 .-тигельной полярности только на выходе моста X и отсутствие сигналов на мостах Y и Z, что однозначно соответствует направлению нажатия.
Аналогично работает устройство при
0 нажатии в произвольном направлении в пределах 360°. При нажатиях в направлениях,отличны:; от осей X и Y.например в сторону символов +К. н М. -К. -М (фиг.2), будут работать мосты X и Y. По таблице можно
5 прогледмть работу устройства ь этих направлениях нзжзтия.
Рассмотри работу устройства при вертикальном нажатии (по оси Z) усилием Р. При этом гензорозисторы R7-R13 рзстягиваются все HJ одну длину и угеличивают спое сопротивление из одну величину, а тен- зорезисторы R1--R6 снимаются и уменьшают сопротивление также на одну величину. Тензорсзисторы R7, RO, R11. R12, включенные в мост X, одновременно увеличивают сопротивление на одинаковую величину, что не приводит к разбалансу моста X, т.е. выходной сигнал 11аых.х 0. Тензорезисторы R1, R2, R5, R6, включенные в мост Y, одновременно на о л.и на ко ву о величину уменьшают сопротивление, что также не приводит к изменению выходного сигнала с моста Y.
Тензорезисторы, включенные в мост Z, изменяют сопротивление следующим образом: R9 и R10 увеличивают сопротивление, a R3, R4 уменьшают, что приводит к разбалансу v.-.ста Z и появлению на его выходе сигнала положительной полярности.
По таблице можно проследить работу устройства при одновременном нажатии в вертикальном и соответствующих горизонтальных направлениях.
Комбинация полярности, а также величина выходного сигнала из трех мостов однозначно несет информацию о направлении и усилии нажатия на рычаг управления.
Предлагаемое устройство позволяет расширить обпасть применения устройства путем увеличения объема вводимой информации за счет в с ода пространственной информации а системе трех координат X, Y, Z. Кроме информации, соответствующей нажатию на рычаг 1 управления в горизонтальном направлении в пределах 360° в координагахХ, Y устройство позволяет получить сигнал, пропорциональный усилию нажатия на рыч-;г 1 управления в вертикальном направлении по оси Z. Так, например, при.вводе текстовой информации сигнал, соответствующий нажатию нз 1 уп- реолеимя а вертикальном направлении, может служить управляющим сигналом переключения регистра (количество регистров/ложет соответствовать определенному усилию нажатия на ручку управления), перевода каретки (курсора) на новую строку или получения другой вспомогательной информации. Крсмз того, устройстао обладает большой чувствительностью к управляющему воздзйствию за счет меньшего усилия нажатил па рычаг 1 управления для получения определенного уровня сигнала. Так как в прототипе рычаг одним концом жестко закреплен ч корпусе устройства и жесткость рычага определяется жертвенными ребрч- ми (которые является ребрами жесткости), то уровень выходного сигнала неравномерен (при одинаковом усилии нажатия) в различных направлении нл.ъатня и опре- де- яется упругими свойствами рычага управления при его изгибе. В предложенном устройстве оба конца рычага управления перемещаются и уро- вень выходного сигнала зависит от других СБОЙСТП тензорезист.ороп, что о итоге приводит к одинаковому урооню выходного смгна0 ла при одинаковом усилии нажатия на рычаг управления в произвольном направлении. Формула изобретения Устройство для ввода информации, содержащее корпус, на лицевой стороне
5 которого закреплена шкала с информационными символами, рычаг управления и тензодатчики на проволочных тензорези- сточах, отличающееся тем, что. с целью расширения области применения устройст0 ва за счет увеличения обьема вводимой ин- ( эрмации и увеличения чувствительности к управляющему воздействию, оно содержит цилиндрические держатели, рычаг управления выполнен в виде стержня круглого сече5 ния, закрепленного в середине внутри корпуса, выполненного цилиндрическим, гибкой мембраной, цилиндрические держатели расположены по четыре на одинаковом расстоянии от гибкой мемОр;-1пы гыи0 скостях, перпендикулярных продольной оси стержня, причем в первой плоскости два цилиндрических держателя закреплены диаметрально противоположно на стержне, два других диаметрально расположенных
5 цилиндрических держателя перпендикулярны к первым и закреплены на цилиндрическом корпусе, во второй плоскости два диаметрально расположенных цилиндрических держателя закреплены нз стер/хне пен0 пердикулярно цилиндрическим держателям. закрепленным на стержне в перзой плоскости, а два других цилиндрических держателя «о второй плоскости расположен:. диаметрально и закреплены на цилиндриче5 ском корпусе перпендикулярно цилиндри- чЈ..ким держателям, закрепленном на стержне, и цилиндрическим держателям. закрепленным на цилиндрическом корпусе в парной плоскости, но цилиндрических де0 ржэтелях. расположенных в разных плоскостях, параллельно продол; по- оси стержня. намотаны по три проволочных техзорези- стора, включенных в три моста лостонннсго тока, при этом по даа проволочных текчоре5 зисторз. намотанных на диаметрально р-зс- пс-юженные цилиндрические держатечи. закрепленные в первой плоскости на стс-о- ;кне, а во второй плоскости - на цилиндрическом корпусе, включены в первый-мест псстаян-юго :с1сз, по д.а проволочных гензорс.зисторэ, измотанных на диаметрально расположенные цилиндрические держатели, закрепленные в первой плоскости на ..млиндрическом корпусе, а по второй плоскости - на стержне, включены во второй 5 и второй плоскостях.
Прнмеч«ии«: М -(мшьше). тензорезисторы уменьшают свое -спрэтияленке; Б -(больше), текзорезистооы уведкчиоают с&с-е сспсютивлеиие:
+ - положительна полярность моста (положительное напряжение на черхкем пв схеме tunee моста): - -отрицательная попяркЪсть моста; О - течзорезисторы м мосты не изменяют своего состояния.
-М
мост постоянного тока,в третий мост постоянного тока включены четыре проволочных тензорезистора, намотанных по одному на пары цилиндрических держателей в первой
У. А-А
+К
Wuz.l
ОЗиг.З
Vfo/xX
| Томашевский Д.И | |||
| и др | |||
| Графические средства сстомзт /ззц и проектирования РЭА | |||
| -М.: Советское радио, 1980, с.65 | |||
| УСТРОЙСТВО ДЛЯ ВВОДА ИНФОРМАЦИИ | 0 |
|
SU370602A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Устройство для ввода информации | 1986 |
|
SU1361535A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
