UK(t)
3
(Я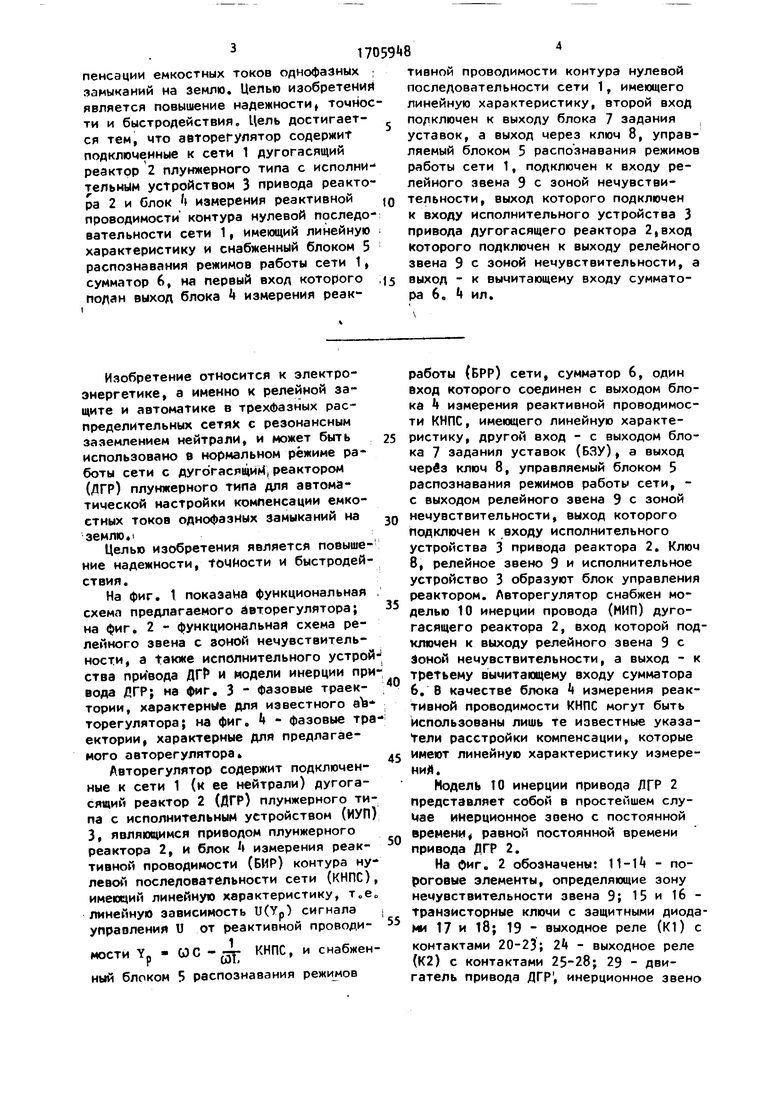
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматической настройки компенсации емкостных токов в кабельных сетях с дугогасящим реактором | 1984 |
|
SU1229898A1 |
| Способ компенсации токов однофазного замыкания в трехфазной сети с дугогасящим реактором в нейтрали | 1984 |
|
SU1264263A1 |
| Устройство для автоматической настройки компенсации емкостных токов в электрических сетях | 1984 |
|
SU1257745A1 |
| Устройство управления дугогасящим реактором с изменяемым воздушным зазором | 1988 |
|
SU1541707A1 |
| Устройство для компенсации ЭДС поврежденной фазы при однофазных замыканиях в сетях с незаземленной нейтралью | 1990 |
|
SU1737615A1 |
| Измеритель и всережимный автокомпенсатор токов однофазных замыканий в воздушных,кабельных и смешанных сетях | 1987 |
|
SU1443079A1 |
| Способ распознавания поврежденной фазы в сетях с компенсацией токов однофазного замыкания | 1990 |
|
SU1781644A1 |
| Автоматический регулятор резонанс-НОгО СОСТОяНия КОНТуРА НулЕВОйпОСлЕдОВАТЕльНОСТи СЕТи | 1979 |
|
SU813585A1 |
| Поисковый регулятор для резонансной настройки контура нулевой последовательности сети | 1982 |
|
SU1080231A1 |
| СПОСОБ АВТОНАСТРОЙКИ КОМПЕНСАЦИИ ЕМКОСТНОЙ И АКТИВНОЙ СОСТАВЛЯЮЩИХ ПРИ ДУГОВЫХ ЗАМЫКАНИЯХ НА ЗЕМЛЮ | 1994 |
|
RU2074473C1 |
Изобретение относится к электроэнергетике, а именно к релейной защите и автоматике в трехфазных распределительных сетях с резонансным заземлением нейтрали, и может быть использовано в нормальном режиме работы сети с дугогасящим реактором плунжерного типа для автоматической настройки ком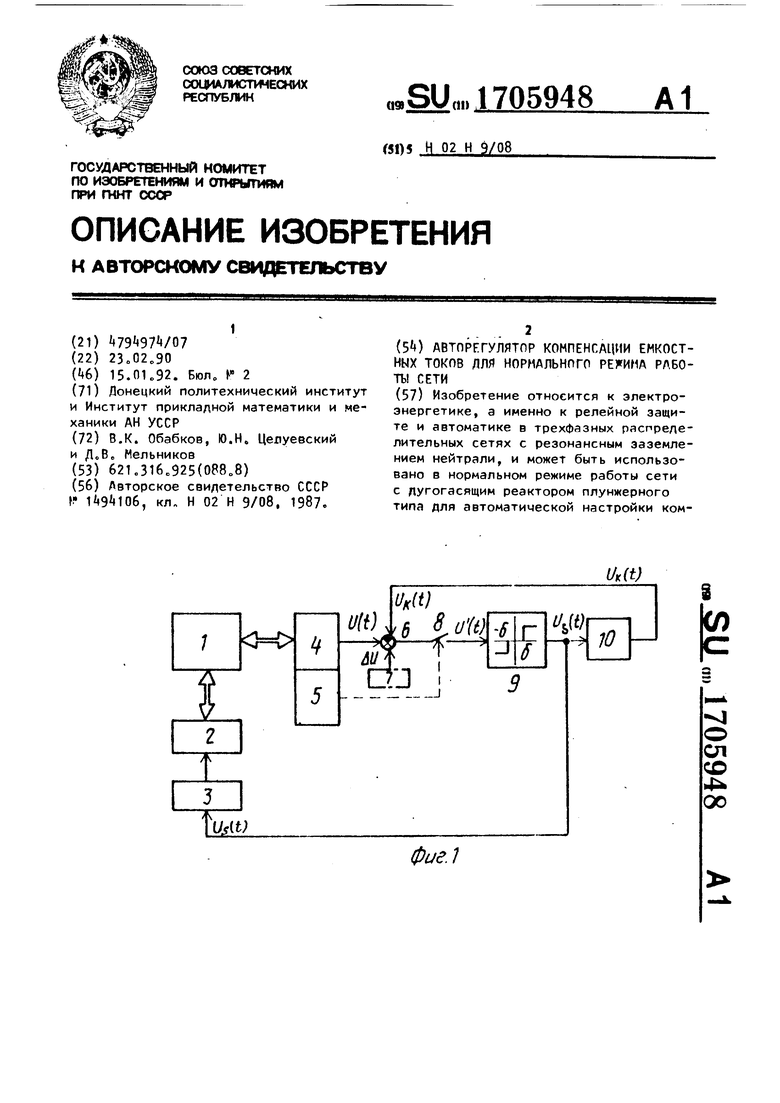
ел
со
Ј
00
фие.1
пенсации емкостных токов однофазных : замыканий на землю. Целью изобретений является повышение надежности, точности и быстродействия. Цель достигается тем, что авторегулятор содержит подключенные к сети 1 дугогасящий реактор 2 плунжерного типа с исполнительным устройством 3 привода реактора 2 и блок измерения реактивной проводимости контура нулевой прследо-: вательности сети 1, имеющий линейную i характеристику и снабженный блоком 5 распознавания режимов работы сети 1, сумматор 6, на первый вход которого , подан выход блока измерения реакИзобретение относится к электроэнергетике, а именно к релейной защите и автоматике в трехфазных распределительных сетях с резонансным заземлением нейтрали, и может быть использовано в нормальном режиме работы сети с дугогасящиМ реактором (ДГР) плунжерного типа для автоматической настройки компенсации емкостных токов однофазных замыканий на
землю, i
Целью изобретения является повыше-1 ние надежности, томности и быстродействия.
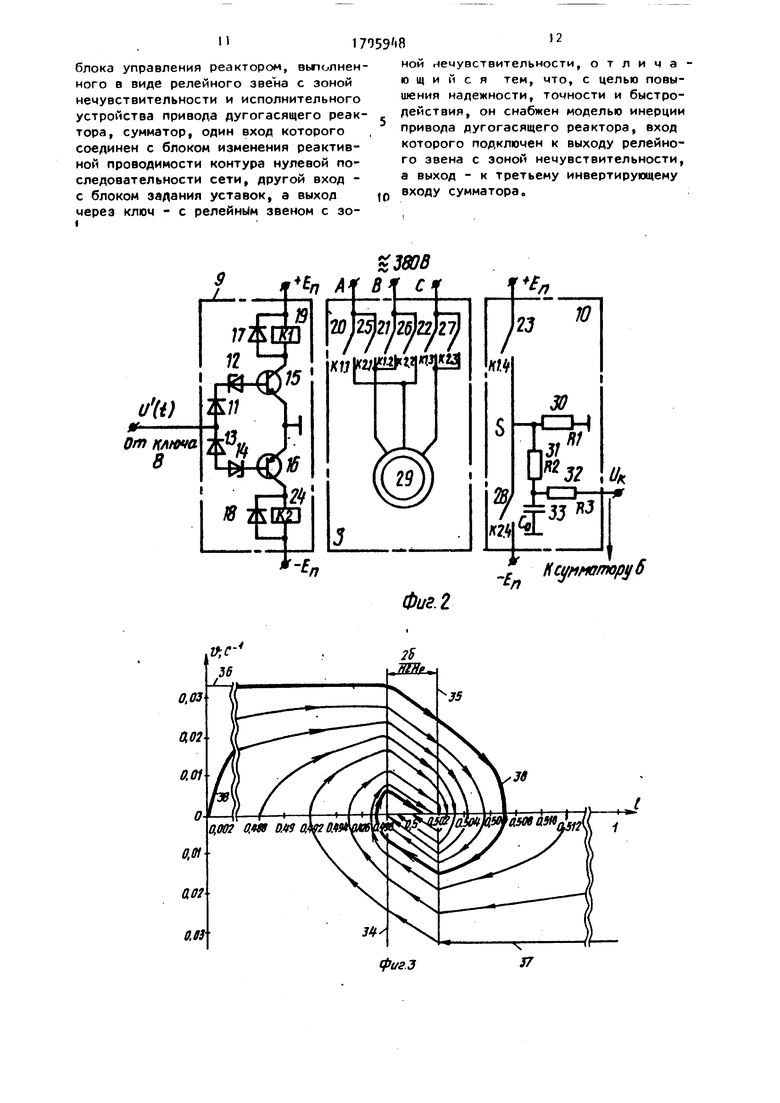
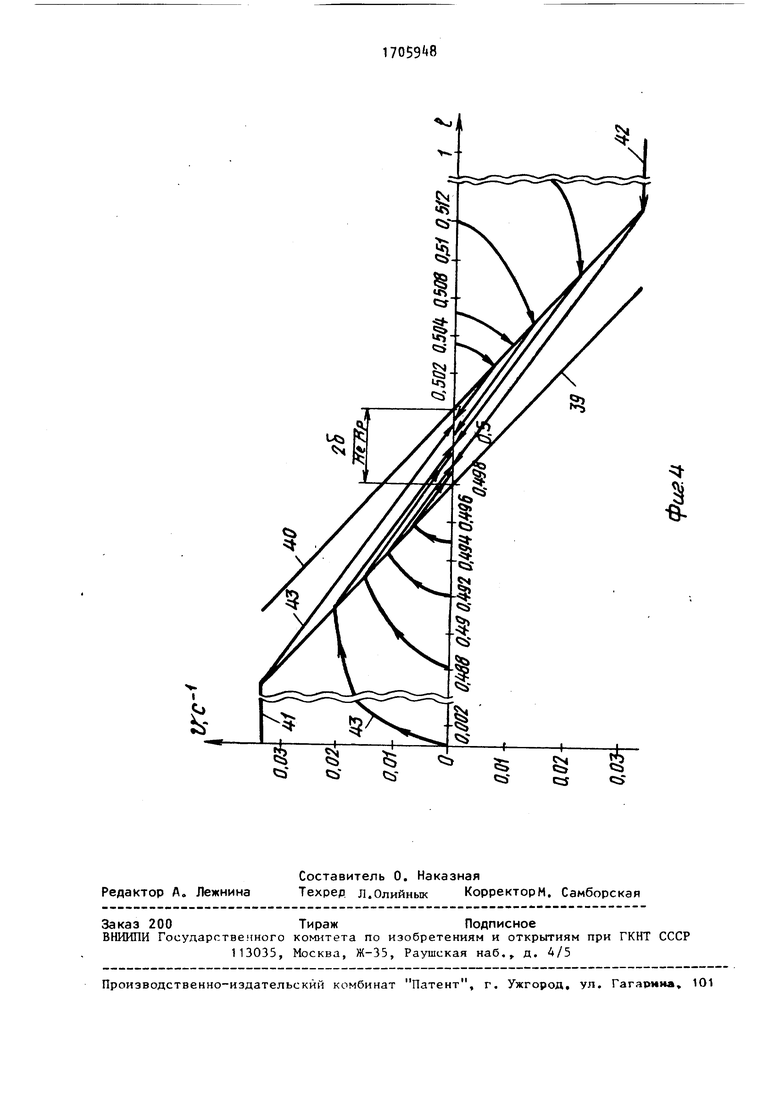
На фиг. 1 показана функциональная , схема предлагаемого авторегулятора; на фиг. 2 - функциональная схема релейного звена с зоной нечувствительности, а Также испблнительного устройства привода ДГР и модели инерции привода ДГР; на фиг. 3 - фазовые траек- тории, характерные для известного аЪ торегулятора; на фиг. k - фазовые траектории, характерные для предлагаемого авторегулятора
Авторегулятор содержит подключенные к сети 1 (к ее нейтрали) дугогасящий реактор 2 (ДГР) плунжерного типа с исполнительным устройством (ИУП) 3, являющимся приводом плунжерного реактора 2, и блок измерения pea к- тивной проводимости (ВИР) контура нулевой последовательности сети (КНПС), имеющий линейную характеристику, т0ес линейную зависимость U(Yp) сигнала управления U от реактивной проводи-
мости Yn « 03С - ,7kT КНПС, и снабжен1Р
ный блоком 5 распознавания режимов
тивной проводимости контура нулевой последовательности сети 1, имеющего линейную характеристику, второй вход по/гключен к выходу блока 7 задания уставок, а выход через ключ 8, управляемый блоком 5 распознавания режимов работы сети 1, подключен к входу релейного звена 9 с зоной нечувствительности, выход которого подключен к входу исполнительного устройства 3 привода дугогасящего реактора 2,вход которого подключен к выходу релейного звена 9 с зоной нечувствительности, а выход - к вычитающему входу сумматора 6, ил.
работы {ВРР) сети, сумматор 6, один вход которого соединен с выходом блока 1 измерения реактивной проводимости КНПС, имеющего линейную характеристику, другой вход - с выходом блока 7 задания уставок (БЗУ), а выход через ключ 8, управляемый блоком 5 распознавания режимов работы сети, - с выходом релейного эвена 9 с зоной нечувствительности, выход которого подключен к входу исполнительного устройства 3 привода реактора 2. Ключ 8, релейное звено 9 и исполнительное устройство 3 образуют блок управления реактором. Авторегулятор снабжен моделью 10 инерции провода (МИП) дугогасящего реактора 2, вход которой подключен к выходу релейного звена 9 с зоной нечувствительности, а выход - к третьему вычитающему входу сумматора 6. В качестве блока Ь измерения реактивной проводимости КНПС могут быть использованы лишь те известные указатели расстройки компенсации, которые имеют линейную характеристику измерений.
Модель ТО инерции привода ДГР 2 представляет собой в простейшем случае инерционное звено с постоянной времени равной постоянной времени привода ДГР 2.
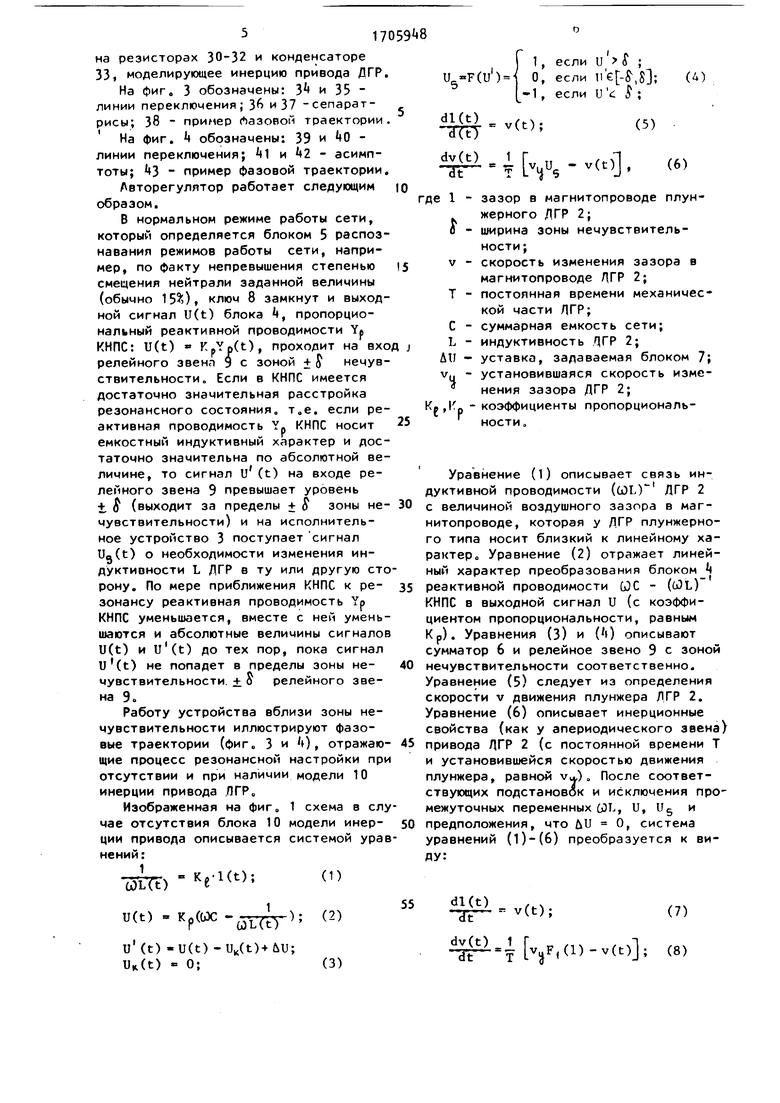
На фиг. 2 обозначены: - пороговые элементы, определяющие зону нечувствительности эвена 9; 15 и 16 - транзисторные ключи с защитными диодами 17 и 18; 19 - выходное реле (К1) с контактами 20-23; 2 - выходное реле (К2) с контактами 25-28; 29 - двигатель привода ДГР , инерционное звено
5170
на резисторах 30-32 и конденсаторе
33, моделирующее инерцию привода ДГР.
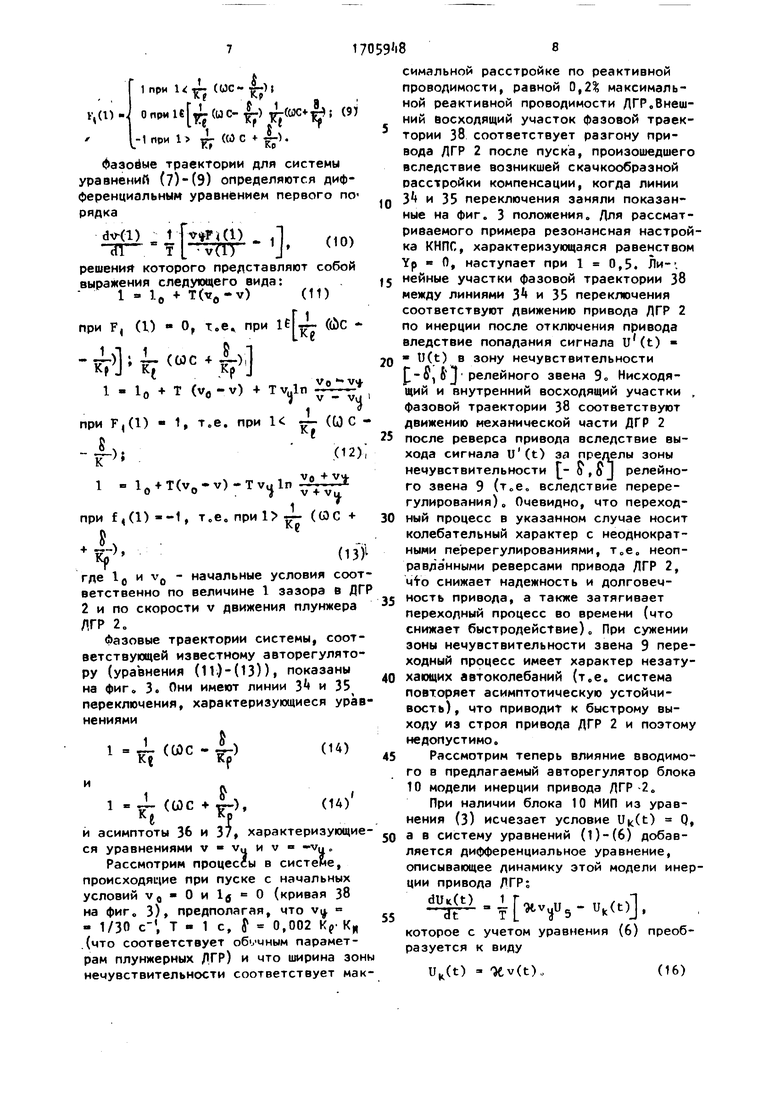
На фиг о 3 обозначены: З и 35 линии переключения; 36 и 37 -сепарат- рисы; 38 - пример базовой траектории.
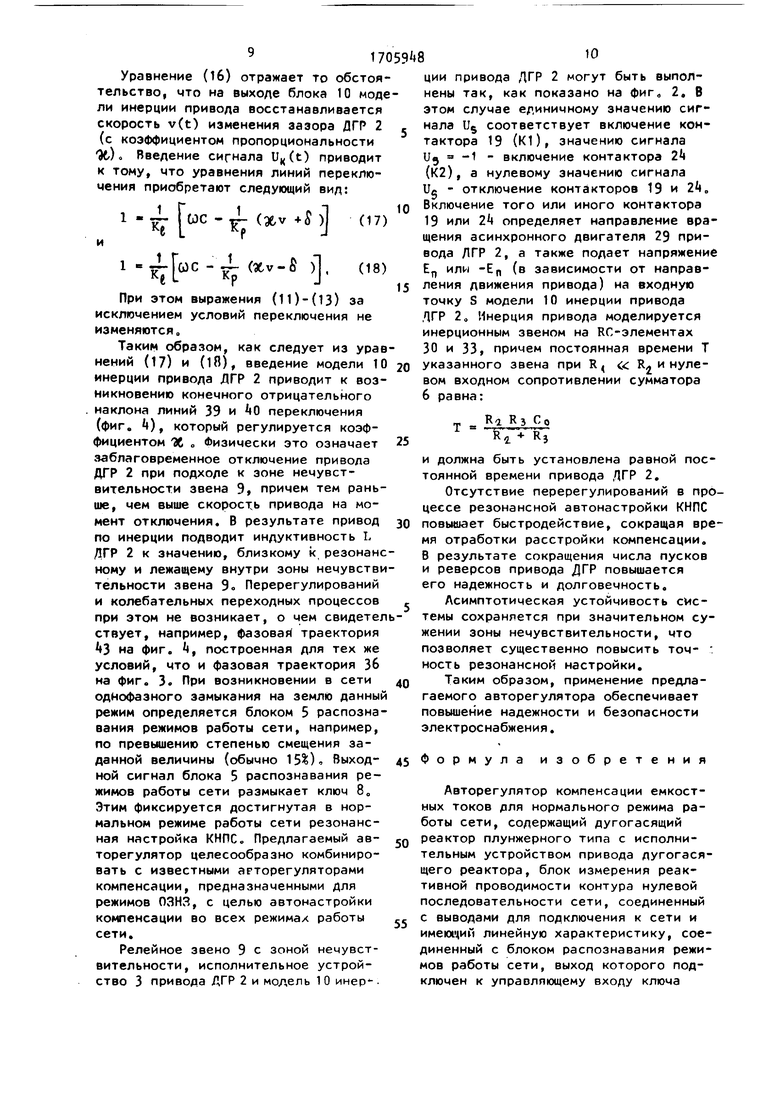
На фиг. обозначены: 39 и 0 - линии переключения; 41 и А2 - асимп- тоты; пример фазовой траектории.
Авторегулятор работает следующим образом.
В нормальном режиме работы сети, который определяется блоком 5 распоз
навания режимов работы сети, например, по факту непревышения степенью смещения нейтрали заданной величины (обычно 15)), ключ 8 замкнут и выходной сигнал U(t) блока kt пропорциональный реактивной проводимости Y КНПС: U(t) KpYp(t), проходит на вхо релейного звено 9 с зоной + J нечувствительности. Если в КНПС имеется достаточно значительная расстройка резонансного состояния, т.е. если реактивная проводимость Y. КНПС носит емкостный индуктивный характер и достаточно значительна по абсолютной величине, то сигнал и (t) на входе релейного звена 9 превышает уровень + 8 (выходит за пределы + 8 зоны нечувствительности) и на исполнительное устройство 3 поступает сигнал Ug(t) о необходимости изменения индуктивности L ДГР в ту или другую сторону. По мере приближения КНПС к резонансу реактивная проводимость Yp КНПС уменьшается, вместе с ней уменьшаются и абсолютные величины сигналов U(t) и U (О до тех пор, пока сигнал u (t) не попадет в пределы зоны нечувствительности. + о релейного звена 9.
Работу устройства вблизи зоны нечувствительности иллюстрируют фазовые траектории (фиг. 3 и ), отражающие процесс резонансной настройки при отсутствии и при наличии модели 10 инерции привода ,ПГР„
Изображенная на фиг„ 1 схема в случае отсутствия блока 10 модели инер- ции привода описывается системой урав
Kg-l(t); (1)
КР(ЫС-(ЗШГ); (2)
U(t) -UK(t)+Ы); 0;(3)
(4)
(6)
е 1
v Т зазор в магнитопроводе плунжерного ДГР 2;
о - ширина зоны нечувствительности ;
скорость изменения зазора в магнитопроводе ДГР 2; постоянная времени механической части ДГР; суммарная емкость сети; индуктивность ДГР 2; уставка, задаваемая блоком 7; установившаяся скорость изменения зазора ДГР 2; .,. - коэффициенты пропорциональности
С
L
ди
v
Уравнение (1) описывает связь индуктивной проводимости (COL)1 ДГР 2 с величиной воздушного зазора в магнитопроводе, которая у ДГР плунжерного типа носит близкий к линейному характер,, Уравнение (2) отражает линейный характер преобразования блоком
реактивной проводимости (ОС - ((OL) КНПС в выходной сигнал U (с коэффициентом пропорциональности, равным Кр). Уравнения (3) и () описывают сумматор 6 и релейное звено 9 с зоной
нечувствительности соответственно. Уравнение (5) следует из определения скорости v движения плунжера ЛГР 2. Уравнение (6) описывает инерционные свойства (как у апериодического звена)
привода ДГР 2 (с постоянной времени Т и установившейся скоростью движения плунжера, равной . После соответствующих подстановок и исключения промежуточных переменных ОЭЬ, U, Ug и предположения, что UU 0, система уравнений (1)-(6) преобразуется к ви- ДУ:
55 -(t);
(7)
3Ј4kF,( (8)
v,d)
1при (WC- |)t ОпрмнГ(иС-|) (UC+J-Э; (9 -1 при 1 YJ (() с + -).
Фазовые траектории для системы уравнений ()-(9) определяются дифференциальным уравнением первого по- рядка
JUKI) (l) , Л ,1{П
-ЗГ т L ;vW Т ( °
решений которого представляют собой
выражения следующего вида:
- 1-U T(vn-v) (11)
F, (I) - О, т.е при leLL ((ЬС
н(uc+tyi
20
1о + Т (ve -v) + Tvjti
v о yfr
у
v - v
F,(l)
). У
1
Ч
1, т.е. при К ((О С к« 25
1 l0 + T(v0-v),lrt
1 при f,(l)--1, т.е. ((ОС +
+ где 10 и v0 - начальные условия соответственно по величине 1 зазора в ДГР 2 и по скорости v движения плунжера ЛГР 2.
Фазовые траектории системы, соответствующей известному авторегулятору (уравнения (11.) -(13)), показаны на фиг. 3. Они имеют линии 3 и 35 переключения, характеризующиеся уравнениями
1
Ч
()
(14)
Ч
ft, (СОС+Ј-), (14)
I 36 и 37, характеризующие-
и асимптоты
ся уравнениями v Vu и v vif°
Рассмотрим процессы в системе, происходяьчие при пуске с начальных условий v0-0nltf 0 (кривая 38 на фиг. 3), предполагая, что v - 1/30 с 1, Т - 1 с, У 0,002 .(что соответствует объ-чным параметрам плунжерных ЛГР) и что ширина зоны нечувствительности соответствует мак
10
15
20
25
;
30
Р35
45
- 5Q
ны к55
симальной расстройке по реактивной проводимости, равной 0,2% максимальной реактивной проводимости ЛГР.Внешний восходящий участок фазовой траектории 38 соответствует разгону привода ДГР 2 после пуска, произошедшего вследствие возникшей скачкообразной расстройки компенсации, когда линии 3 и 35 переключения заняли показанные на фиг. 3 положения. Для рассматриваемого примера резонансная настройка КНПС, характеризующаяся равенством Yp 0, наступает при 1 0,5. Ли--, нейные участки фазовой траектории 38 между линиями 3k и 35 переключения соответствуют движению привода ДГР 2 по инерции после отключения привода вледствие попадания сигнала u (t) - U(t) в зону нечувствительности Ј-S, 6%J релейного звена 9« Нисходящий и внутренний восходящий участки , фазовой траектории 38 соответствуют движению механической части ДГР 2 после реверса привода вследствие выхода сигнала U (t) за пределы зоны нечувствительности Ј- о ,$1 релейного звена 9 (т.е. вследствие перерегулирования). Очевидно, что переходный процесс в указанном случае носит колебательный характер с неоднократными перерегулированиями, т.е. неоп- равданными реверсами привода ЛГР 2, что снижает надежность и долговечность привода, а также затягивает переходный процесс во времени (что снижает быстродействие). При сужении зоны нечувствительности звена 9 переходный процесс имеет характер незатухающих автоколебаний (т.е. система повторяет асимптотическую устойчивость), что приводит к быстрому выходу из строя привода ЛГР 2 и поэтому недопустимо.
Рассмотрим теперь влияние вводимого в предлагаемый авторегулятор блока 10 модели инерции привода ЛГР -2.
При наличии блока 10 МИП из уравнения (3) исчезает условие U|((t) Q, а в систему уравнений (1)-(6) добавляется дифференциальное уравнение, описывающее динамику этой модели инерции привода ЛГР:
.i v4U5-Mt.
которое с учетом уравнения (6) преобразуется к виду
UK(t)
ttv(t)
(16)
Уравнение (16) отражает то обстоятельство, что на выходе блока 10 модели инерции привода восстанавливается скорость v(t) изменения зазора ДГР 2 , (с коэффициентом пропорциональности ЭбК Введение сигнала UK(t) приводит к тому, что уравнения линий переключения приобретают следующий вид:
(ХУ+П
(v-fi ),
(17)
(18)
Ч L р
При этом выражения (11)-(13) за исключением условий переключения не изменяются„
Таким образом, как следует из уравнений (17) и (18), введение модели 10 инерции привода ДГР 2 приводит к возникновению конечного отрицательного наклона линий 39 и 0 переключения (фиг. ), который регулируется коэффициентом б о Физически это означает заблаговременное отключение привела ДГР 2 при подходе к зоне нечувствительности звена 9, причем тем раньше, чем выше скорость привода на момент отключения. В результате привод по инерции подводит индуктивность L ДГР 2 к значению, близкому к резонансному и лежащему внутри зоны нечувствительности звена 9 о Перерегулирований и колебательных переходных процессов при этом не возникает, о чем свидетелствует, например, фазовая траектория на фиг. , построенная для тех же условий, что и фазовая траектория 36 на фиг. 3. При возникновении в сети однофазного замыкания на землю данный режим определяется блоком 5 распознавания режимов работы сети, например, по превышению степенью смещения заданной величины (обычно 15%) Выходной сигнал блока 5 распознавания режимов работы сети размыкает ключ 8. Этим фиксируется достигнутая в нормальном режиме работы сети резонансная настройка КНПС. Предлагаемый авторегулятор целесообразно комбинировать с известными агторегуляторами компенсации, предназначенными для режимов ОЗНЗ, с целью автонастройки компенсации во всех режимах работы сети.
Релейное звено 9 с зоной нечувствительности, исполнительное устройство 3 привода ДГР 2 и модель 1 0 инер .
,
10
15
2025ь
ции привода ДГР 2 могут быть выполнены так, как показано на фиг„ 2. В этом случае единичному значению сигнала Us соответствует включение контактора 19 (К1), значению сигнала Ug -1 - включение контактора 2 (К2), а нулевому значению сигнала Ug - отключение контакторов 19 и 2k, Включение того или иного контактора 19 или определяет направление вращения асинхронного двигателя 29 привода ЛГР 2, а также подает напряжение Еп или -Ер (в зависимости от направления движения привода) на входную точку S модели 10 инерции привода ДГР 20 Инерция привода моделируется инерционным звеном на КС-элементах 30 и 33, причем постоянная времени Т указанного звена при R « нулевом входном сопротивлении сумматора б равна:
Ra R3 Co
R4 +
3
и должна быть установлена равной постоянной времени привода ДГР 2.
Отсутствие перерегулирований в процессе резонансной автонастройки КНПС повышает быстродействие, сокращая время отработки расстройки компенсации. В результате сокращения числа пусков и реверсов привода ДГР повышается его надежность и долговечность.
Асимптотическая устойчивость системы сохраняется при значительном сужении зоны нечувствительности, что позволяет существенно повысить точ- : ность резонансной настройки.
Таким образом, применение предлагаемого авторегулятора обеспечивает повышение надежности и безопасности электроснабжения.
20 25 45 Формула изобретения
Авторегулятор компенсации емкостных токов для нормального режима работы сети, содержащий дугогасящий реактор плунжерного типа с исполнительным устройством привода дугогася- щего реактора, блок измерения реактивной проводимости контура нулевой последовательности сети, соединенный с выводами для подключения к сети и имеющий линейную характеристику, соединенный с блоком распознавания режимов работы сети, выход которого подключен к управляющему входу ключа
блока управления реактором, выполненного в виде релейного звена с зоной нечувствительности и исполнительного устройства привода дугогасящего реактора, сумматор, один вход которого соединен с блоком изменения реактивной проводимости контура нулевой последовательности сети, другой вход - с блоком задания уставок, а выход через ключ - с релейным звеном с зоZ380Bп А В Ч С
гЩ
wfi&faf №
ной нечувствительности, отличающийся тем, что, с целью повышения надежности, точности и быстродействия, он снабжен моделью инерции привода дугогасящего реактора, вход которого подключен к выходу релейного звена с зоной нечувствительности, а выход - к третьему инвертирующему входу сумматора.:
Фиг.2
-i
п
Ксупматоруб
37
I
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
