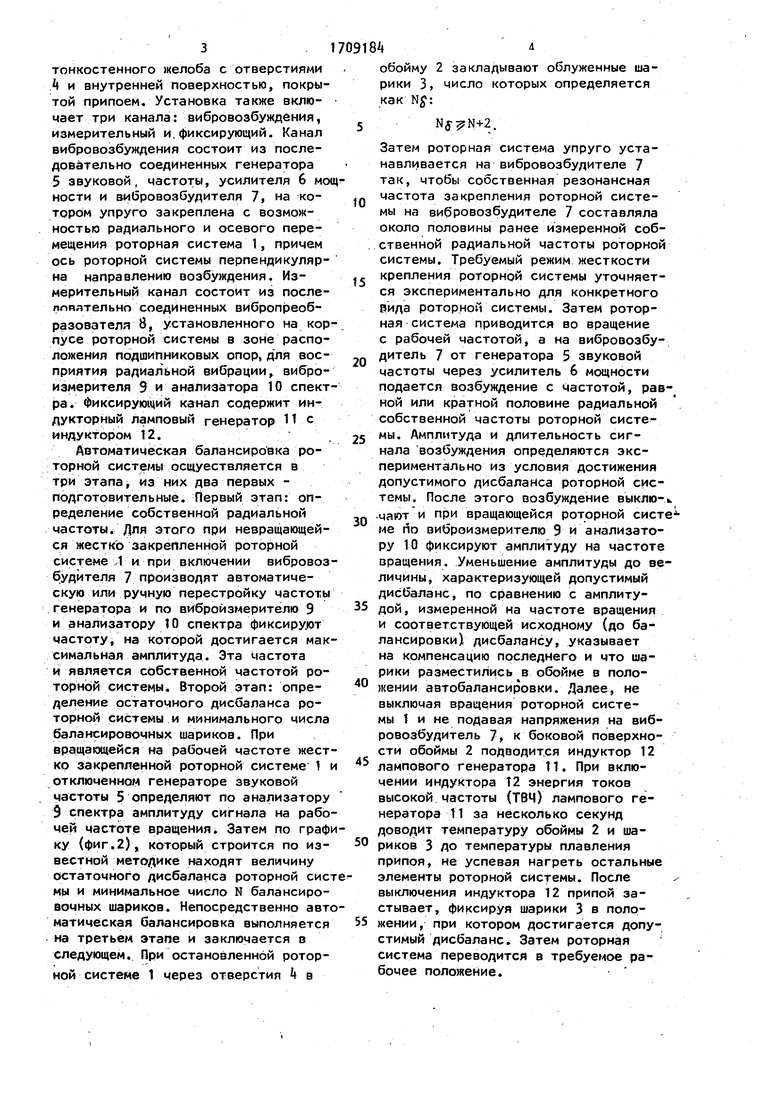
тонкостенного желоба с отверстиями Ц и внутренней поверхностью, покрытой припоем. Установка также включает три канала: вибровозбуждения, измерительный и фиксирующий. Канал вибровозбуждения состоит из последовательно соединенных генератора 5 звуковой, частоты, усилителя 6 мощности и вибровозбудителя 7, на которЬм упруго закреплена с возможностью радиального и осевого перемещения роторная система 1, причем ось роторной системы перпендикулярна направлению возбуждения. Измерительный канал состоит из послеповлтельно соединенных вибропреобразователя 8, установленного на корпусе роторной системы в зоне расположения Подшипниковых опор, для восприятия радиальной вибрации, виброизмерителя 9 и анализатора 10 спектра. Фиксирую1ций канал содержит индукторный ламповый генератор 1t с индуктором 12.
Автоматическая балансировка роторной системы осщуествляется в три этапа, из них два первых подготовительные. Первый этап: определение собственной радиальной частоты. Для этого при невращающейся жестко закрепленной роторной системе .1 и при включении вибровозбудйтеля 7 производят автоматическую или ручную перестройку частоты генератора и по вибройзмерителю 9 и анализатору 10 спектра фиксируют частоту, на которой достигается максимальная амплитуда. Эта частота и является собственной частотой роторной системы. Второй этап: определение остаточного дисбаланса роторной системы и минимального числа балансировочных шариков. При вращающейся на рабочей частоте жестко закрепленной роторной системе 1 и отключенном генераторе звуковой частоты 5 определяют по анализатору 9 спектра амплитуду сигнала на рабочей частоте вращения. Затем по графику (фиг.2), который строится по известной методике находят величину остаточного дисбаланса роторной сист мы и минимальное число N балансировочных шариков. Непосредственно автоматическая балансировка выполняется на третьем этапе и заключается в следующем. При остановленной роторной системе 1 через отверстия в
обойму 2 закладывают облуженные шарики 3, число которых определяется как
.
Затем роторная система упруго устанавливается на вибровозбудителе 7 так, чтобы собственная резонансная частота закрепления роторной системы на вибровозбудителе 7 составляла около половины ранее измеренной собственной радиальной частоты роторной системы. Требуемый режим жесткости крепления роторной системы уточняется экспериментально для конкретного вида роторной системы. Затем роторная система приводится во вращение с рабочей частотой, а на вибровозбудитель 7 от генератора 5 звуковой частоты через усилитель 6 мощности подается возбуждение с частотой, равной или кратной половине радиальной собственной частоты роторной системы. Амплитуда и длительность сигнала возбуждения определяются экспериментально из условия достижения допустимого дисбаланса роторной системы. После этого возбуждение выключают и при вращающейся роторной сист ме по виброизмерителю 9 и анализатору 10 фиксируют амплитуду на частоте вращения. Уменьшение амплитуды до величины, характеризующей допустимый дисбаланс, по сравнению с амплитудой, измеренной на частоте вращения и соответствующей исходному (до балансировки) дисбалансу, указывает на компенсацию последнего и что шарики разместились в обойме в положении автобаЛансировки. Далее, не выключая вращения роторной системы 1 и не подавая напряжения на вибровозбудитель 7 к боковой поверхности обоймы 2 подводится индуктор 12 лампового генератора 11. При включении индуктора 12 энергия токов высокой частоты (ТВЧ) лампового генератора 11 за несколько секунд доводит температуру обоймы 2 и шариков 3 до температуры плавления припоя, не успевая нагреть остальные элементы роторной системы. После выключения индуктора 12 припой застывает, фиксируя шарики 3 в положении, при котором достигается допустимый дисбаланс. Затем роторная система переводится в требуемое рабочее положение,
Пример. Балансировку проводили для роторной системы электродвигателя МБ-22-23. На роторе электродвигателя устанавливалась обойма в виде диска с тороидальной проточкой внутри и отверстием для закладки балансировочных шариков. Корпус электродвигателя крепился на штоке вибровозОудителя 11076 (ГДР, фирма RFT) , вибровьзбудитель от генератора низкой частоты 03000 (фирма RFT через усилитель мощности LV-103 (фирма RFT).. На корпусе электродвигателя устанавливался вибропреобразователь КД- 91 (для контроля вибраций роторной системы в радиальном направлении), выход которого подключался к последовательно соединенным виброизмерителю 11003 (ГДР, фирма ВДТ) и анализатору спектра . Измеренная собственная радиальная частота роторной системы МБ-22-23 составляет 20 Гц. Частота вращения электродвигателя равна 80 Гц; т.е, меньше собственной частоты более чем в 5 рая.
Амплитуда на частоте вращения 80 Гц составляла по анализатору спектра 80 мВ. По предварительно построенной зависимости амплитуды радиальной вибрации на частоте вращения от величины дисбаланса и числа корректирующих шариков для электродвигателя МБ-22-23 (фиг.2) определялись величина остаточнрго дисбаланса (Q,kS Т.мм) и требуемое число (N « 12) корректирующих шариков В качестве шариков использовались облуженныё июрики от подшипника, каждый с массой 0, г и .диаметром 1 мм. Далее упруго крепили электродвигатель на вибровозбудителе так, чтобы ось вращения занимала вертикальное положение. В отверстия обоймы (диаметр 40 мм) были заложены 12 шариков. Затем электродвигатель приволился во вра1чение и на вибровозбудитель подавался сигнал частотой 210 Гц, амплитудой 12 м/с и дли-С
09184
тельностью 5 с. После снятия напряжения с вибровозбудителя осуществлялся контроль дисбаланса иа рабочей частоте вращения по показаниям анализатора спектра. Резкое падение амплитуды сигнала до величины, соответствующей допустимому /дисбалансу, свидетельствует об уравновешивании ро.- торной системы. После подачи сигнала амплитуда радиальной вибрации на частоте вращения 80 Гц составила 10 мВ., что соответствует дисбалансу 0,09 Г мм (фиг.2). Эта величина составляет
J, 1/5 часть от первоначального дисбаланса и характеризует сбалансированность роторной системы, так как по ; паспор.тным данным электродвигатели МБ 22-23 допустимый остаточный дисбаланс равен 0,3 Г-мм.
20
Согласно результатам 11сп||1таний предлагаемый способ обеспечивает снижение остаточного дисбаланса pOTopiHoft системы в 5 раз на рабочей частоте )
25 вращения, что в 5 раз ниже критице. ской.,
Формула изобрете ни я
Способ автоматической балансиров30ки роторных систем, заключающийся в том, что ориентируют ось роторной системы вeptикaльнo, устанабливаЮт на ротор соосно обойму с корректирующими массами, вращают роторную систему и фиксируют положение корректирующих масс после достижения допустимого дисбаланса, отличаю щи и с я тем, что, с целью расширения технологичес(сих -зозможностей путем снижения частоты вращения роторной системы в процессе автобалансировки, систему закрепляют упруго, вращают на рабочей частоте и одновременно воздействуют на нее внешней синусоидаль 5 ной силой, перпендикулярной оси ро-г торной системы на частоте, равной или кратной половине ее радиальной собственной частоты до достижения допустимого дисбаланса роторной системы.

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО ИЗМЕНЕНИЯ ДИСБАЛАНСА ВРАЩАЮЩЕЙСЯ СИСТЕМЫ | 2002 |
|
RU2237118C2 |
| Способ обеспечения автоматической балансировки статически неуравновешенного ротора | 2021 |
|
RU2766945C1 |
| Способ балансировки ротора газоперекачивающего агрегата | 2017 |
|
RU2658597C1 |
| СПОСОБ БАЛАНСИРОВКИ ЭЛЕМЕНТОВ РОТОРНЫХ СИСТЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2485467C2 |
| СПОСОБ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРА ЦБН, ОСНАЩЕННОГО СИСТЕМОЙ МАГНИТНОГО ПОДВЕСА, В СОБСТВЕННЫХ ОПОРАХ | 2021 |
|
RU2803403C2 |
| Способ определения величины дисбаланса роторов | 1983 |
|
SU1145253A1 |
| Устройство для автоматической балансировки роторов гироскопов | 1988 |
|
SU1649275A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ | 1995 |
|
RU2070479C1 |
| СПОСОБ ПРОВЕРКИ КАЧЕСТВА ФУНКЦИОНИРОВАНИЯ НИЗКОЧАСТОТНОГО ДИНАМИЧЕСКОГО БАЛАНСИРОВОЧНОГО СТЕНДА | 2010 |
|
RU2434212C1 |
| МАХОВИКОВАЯ СИСТЕМА НАКОПЛЕНИЯ ЭНЕРГИИ | 2002 |
|
RU2291541C2 |
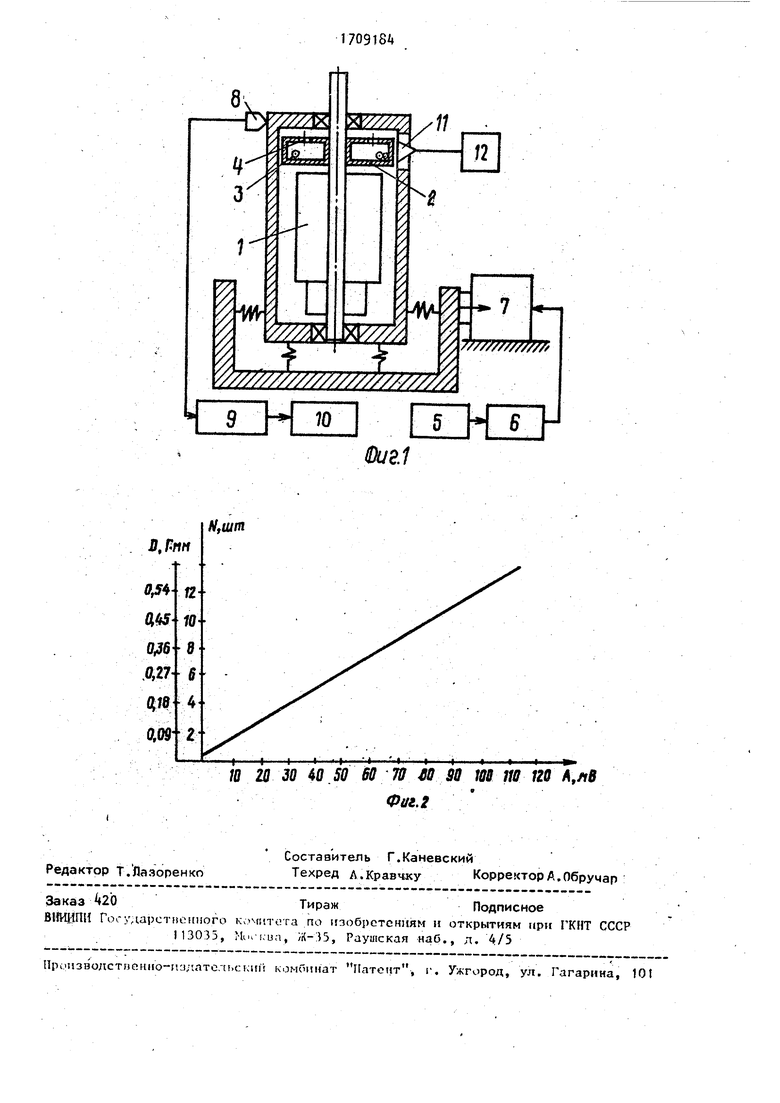
Изобрет(ение относится к балансировочной технике и может быть использовано для проведения автобалан- сироаки на докритимеских частотах. \ Цель изобретения - расширение технологических вбзможностей путем сниже- •ния частоты вращения ротора системы в процессе автобалансировки за счет дополнительного воздействия на систему вибрацией. Для реализации способана ротор системы с вертикально ориентированной осью соосно с ним устанавливают обойму с корректирующими массами в виде свободно перемещающихся облуженных шариков, систему упруго закрепляют, вращают на рабочей частоте и воздействуют на нее внешней синусоидальной силой, перпендикулярной оси ее ротора, на частоте, равной или кратной половине радиальной собственной частоты роторной системы, с амплитудой, обеспеииващек! перемещение корректирующих масс, ив течение времени, необходимого для достижения допустимого дисбаланса. Далее обойма с корректирующими массами быстро разогревается внешним электромагнитным полем ло температуры плавления припоя, которым произведено облуживание внутренней поверхности обоймы и корректирующих масс« и при охлаждении они фиксируются в требуемом положении. 2 ил.g(ЛсИзобретение относится к способам автобалансировки роторных систем и может быть использовано для уравновешивания на докритических частотах вращения.Целью изобретения является расши- • рение технологических возможностей балансировки путем снижения частоты- вращения роторной системы в процессе балансировки.На фиг. 1 представлена схема установки, реализующей предлагаемый способ автоматической балансировки роторных систем; на фиг.2 - график зависимости остаточного дисбаланса D-электродвигателя НБ-22-23 и числа N корректирующих шариков (масса шарика равна 0,04 г,диаметр 1 мм) от величины амплитуды вибрации по показаниям анализатора спектра, измеренной на частоте вращения. ^Установка (фиг.1) включает балансируемую роторную систему 1 с закрепленной на ней соосно обоймой 2, в которую помещены корректирующие шарики 3. Обойма выполнена в виде•viоQOSo4^
| Автоматическое балансировочное устройство | 1975 |
|
SU555309A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
