Изобретение относится к электротехнике и контрольно-измерительной технике и может быть использовано для неразрушающего контроля усилия нажатия возвратных пружин электромагнитных коммутационных аппаратов (ЭМКА) без вскрытия корпуса.
Известен способ измерения усилия нажатия возвратной пружины при помощи граммометра, в. котором рычагом граммометра воздействуют в условную точку на якоре ЭМКА, визуально контролируя начало движения якоря и, зафиксировав граммометр в данном положении, по шкале граммометра определяют величину усилия возвратного нажатия.
Недостатками известного способа является трудоемкость процесса измерения, низкая точность измерения, невозможность автоматизации процесса и невозможность
контроля закрытого ЭМКА. Трудоемкость процесса измерения обуславливается тем. что при каждом измерении необходимо визуально производить контроль за началом движения якоря, по появлению минимального зазора между упором и якорем, который должен составлять сотые доли миллиметра.
Субъективная оценка величины зазора вносит дополнительную погрешность при измерениях. ГрамМометр необходимо удерживать в руке в определенном положении, так как изменение положения грзммометра относительно продольной оси якоря приводит к погрешности измерений.
Наиболее близким по технической сущности к предлагаемому изобретению является устройство для контроля нажатия возвратной пружины электромагнитного реле.
Способ контроля усилия нажатия возвратной пружины электромагнитного реле, используемый в известном устройстве, заключается в том, что к корпусу реле плотно прижимают пьезодатчик, подают в обмотку реле импульсы тока, заданные по амплитуде и длительности. Если импульс тока, подаваемый в обмотку, достаточен для движения якоря, то якорь отрывается от начального положения. По окончании импульса якорь возвращается, ударяясь при этом об упор. Если отрыв якоря происходит, то возникает акустический щелчок, который преобразуется пьезодатчиком в электрический сигнал, и по наличию сигнала судят о величине возвратного нажатия.
Недостатками такого способа контроля являются наличие пьезодатчика, его чувствительность к внешним акустическим помехам, а также необходимость при каждом измерении производить установку датчика в рабочее положение, а после измерения в исходное положение.
Способ контроля не позволяет измерять истинное значение величины контактного нажатия, а также производить контроль при регулировке реле.
Целькэ .изобретения является повышение производительности труда и достоверности контроля путем автоматизации процесса измерения.
Поставленная цель достигается тем, что в известном способе измерения усилия нажатия возвратной пружины ЭМКА путем подачи импульсов тока в обмотку ЭМКА, согласно изобретению, в обмотку ЭМКА подают нарастающий ток в виде ступенек, длительность которых достаточна для движения якоря до момента касания переключающего контакта, контролируют изменение напряжения на обмотке реле после каждой ступеньки тока, запоминают минимальное значение тока и определяют усилие нажатия возвратной пружины по соотношению:
Р 1 К,
где Р - усилие нажатия возвратной пружины, г;
I - ток трогания якоря, мА:
К - коэффициент пропорциональности, г/мА.
Результат вычислений выводят на экране дисплея.
При движении якоря появляется выброс напряжения на обмотке ЭМКА за счет ЭДС самоиндукции (при постоянной величине тока), вызванной изменением магнитного потока а обмотке ЭМКА. Продифференцированная величина ЭДС самоиндукции является сигналом, свидетельствующим о движении якоря.
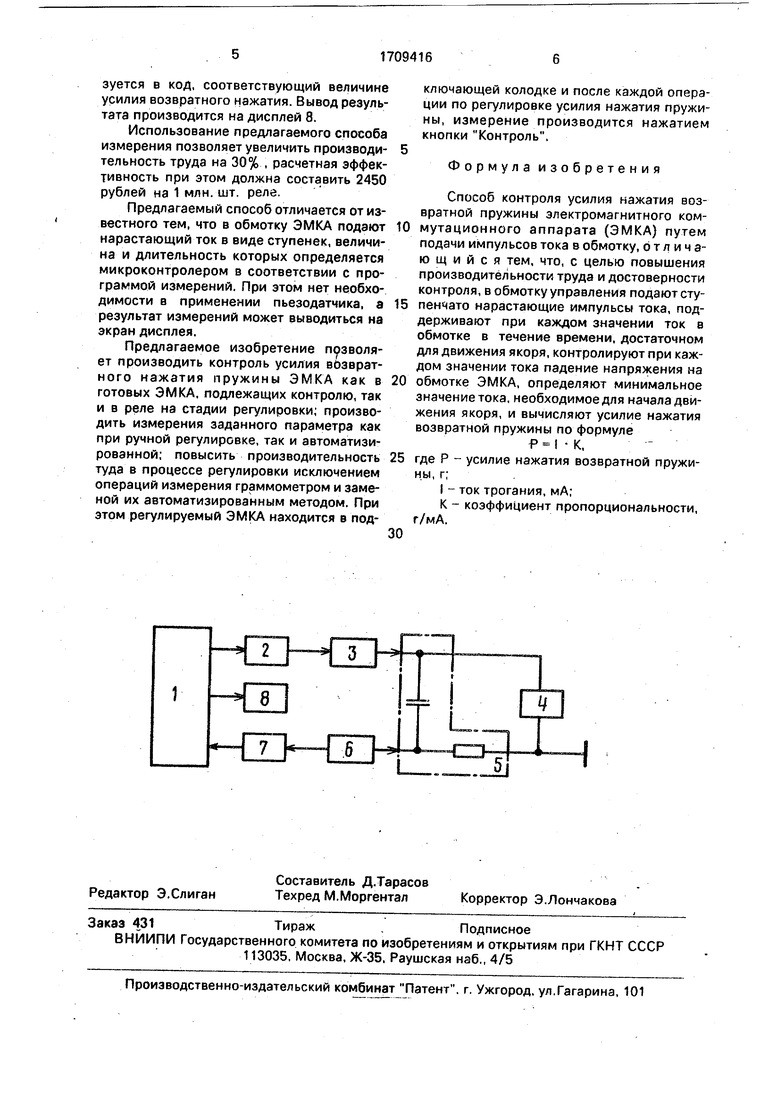
На чертеже приведена схема устройства для реализации предлагаемого способа.
Устройство (фиг. 1) состоит из микроконтролера 1. шины которого соединены с входами цифроаналогового преобразователя (ЦАП) 2. Выход ЦАП 2 соединен с входом управляемого стабилизатора 3 тока, выход
0 которого соединен с выводами для подключения контролируемого ЭМКА 4. Последний через дифференцирующую цепочку 5 соединен с входом усилителя Ь, который соединен с входом триггера 7. выход которого соеди5 иен с микроконтролером 1. Выход микроконтролера 1 соединен с дисплеем 8.
Цифровой код на шине данных микроконтролера 1 преобразуется ЦАП 2 в аналоговый сигнал, который подается на вход
0 управляемого стабилизатора 3 тока. В начале измерений на шине данных микроконтролера 1 выставляется код, соответствующий току, равному 1 % от паспортного значения тока срабатывания, на
5 выходе стабилизатора 3 тока. Приращение тока каждой последующей ступеньки выбирается таким, чтобы ЭДС самоиндукции обмотки ЭМКА 4 не приводила к срабатыванию триггера 7. Нагрузкой стабилизатора 3 тока является обмотке реле 4. После подачи каждого следующего импульса тока производится временная выдержка, необходимая для перемещений якоря. При неподвижном якоре напряжение на обмотке
5 реле определяется проходящим через обмотку током и ее активным сопротивлением и остается постоянным в течение действия импульса. При движении якоря напряжение на обмотке изменяется за счет ЭДС самоиндукции. вызванной изменением магнитного тока в обмотке ЭМКА. Изменение напряжения на обмотке ЭМКА, через дифференцирующую цепочку 5 подается на усилитель б, где напряжение усиливается до величины.
5 необходимой для срабатывания триггера 7. В процессе измерения ток нарастает ступенчато до момента начала движения якоря. После каждой ступеньки микроконтролером 1 производится опрос состояния триггера 7. Если исходное состояние триггера 7 не ме0 няется, то на выходе шины данных микроконтролера 1 устанавливается код. соответствующий приращению тока на 1% паспортного значения тока срабатывания. Когда величина в обмотке ЭМКА 4 становится достаточной для движения якоря, преодоления нажатия возвратной пружины, состояние триггера 7 изменяется и процесс наращивания тока прекращается. Код, соответствующий токутрогания якоря, преобрэзуется в код, соответствующий величине усилия возвратного нажатия. Вывод результата производится на дисплей 8.
Использование предлагаемого способа измерения позволяет увеличить производительность труда на 30% , расчетная эффективность при этом должна составить 2450 рублей на 1 млн. шт. реле.
Предлагаемый способ отличается от известного тем, что в обмотку ЭМКА подают нарастающий ток в виде ступенек, величина и длительность которых определяется микроконтролером в соответствии с программой измерений. При этом нет необходимости в применении пьезодатчика, а результат измерений может выводиться на экран дисплея.
Предлагаемое изобретение п зволяет производить контроль усилия возвратного нажатия пружины ЭМКА как в готовых ЭМКА, подлежащих контролю, так и в реле на стадии регулировки; производить измерения заданного параметра как при ручной регулировке, так и автоматизированной; повысить производительность туда в процессе регулировки исключением операций измерения граммометром и заменой их автоматизированным методом. При этом регулируемый ЭМКА находится в подключающей колодке и после каждой операции по регулировке усилия нажатия пружины, измерение производится нажатием кнопки Контроль.
Формула изобретения
Способ контроля усилия нажатия возвратной пружины электромагнитного коммутационного аппарата (ЭМКА) путем подачи импульсов тока в обмотку, отличающийся тем, что, с целью повышения производительности труда и достоверности контроля, в обмотку управления подают ступенчато нарастающие импульсы тока, поддерживают при каждом значении ток в обмотке в течение времени, достаточном для движения якоря, контролируют при каждом значении тока падение напряжения на обмотке ЭМКА, определяют минимальное значение тока, необходимое для начала движения якоря, и вычисляют усилие нажатия возвратной пружины по формуле
Р I К,
где Р - усилие нажатия возвратной пружины, г;.
I - ток трогания, мА;
К - коэффициент пропорциональности, г/мА.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения контактного нажатия размыкающего контакта электромагнитного нейтрального реле | 1990 |
|
SU1781725A1 |
| Устройство для контроля контактного нажатия размыкающего контакта электромагнитного реле | 1983 |
|
SU1117729A1 |
| Устройство для контроля нажатия возвратных пружин электромагнитных реле | 1983 |
|
SU1229852A1 |
| Способ определения усилия нажатия контактов в двухобмоточных электромагнитных реле | 1977 |
|
SU610067A1 |
| Устройство для снятия характеристик электромагнитного коммутационного аппарата | 1988 |
|
SU1561123A1 |
| Устройство для проверки поляризованных реле | 1960 |
|
SU132301A1 |
| Способ измерения нажатия возвратной пружины электромагнитного реле | 1987 |
|
SU1417059A1 |
| Способ измерения хода якоря двухоб-МОТОчНОгО элЕКТРОМАгНиТА | 1976 |
|
SU828174A1 |
| Способ определения механических параметров электромагнитных реле | 1981 |
|
SU995145A1 |
| Электронный граммометр | 1990 |
|
SU1783609A1 |
Изобретение относится к контрольно- измерительной технике и может быть использовано для неразрушающего контроля усилия нажатия возвратной пружины герметичных реле. Цель изобретения • повышение производительности труда и достоверности контроля. В обмотку испытуемого реле подают нарастающий ток в виде ступенек с выдержкой, необходимой для движения якоря, и фиксируют минимальную величину тока трогания якоря по соотношению Р =^ I -К, где Р - усилие нажатия возвратной пружины. К - коэффициент пропорциональности, определяют величину усилия нажатия возвратной пружины. 1 ил.елС
| Витенбер М.И | |||
| Расчет электромагнитных реле | |||
| М..-Л., Энергия, 1966.Ступель Ф.А | |||
| Электромеханические реле | |||
| Изд-во Харьковского университета, 1956.Авторское свидетельство СССР N? 1229856, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
