(54) СПОСОБ ОПРЕДЕЛЕНИЯ МЕХАНИЧЕСКИХ ПАРАМЕТРОВ ЭЛЕКТРОМАГНИТНЫХ РЕЛЕ

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения механических параметров электромагнитных реле | 1982 |
|
SU1095262A2 |
| Устройство для контроля регулировочных параметров герметизированных электромагнитных реле | 1978 |
|
SU748354A1 |
| Устройство для определения электромагнитных постоянных времени обмоток синхронной электрической машины | 1983 |
|
SU1144061A1 |
| СПОСОБ КОНТРОЛЯ КОНТАКТНОГО ДАВЛЕНИЯ ПРУЖИН | 1967 |
|
SU193618A1 |
| УСТРОЙСТВО для КОНТРОЛЯ ПЕРЕМЕЩЕНИЯ ЯКОРЯ ЭЛЕКТРОМАГНИТНОГО РЕЛЕ | 1967 |
|
SU190484A1 |
| Устройство для измерения временныхпАРАМЕТРОВ элЕКТРОМАгНиТНОгО РЕлЕ | 1979 |
|
SU849154A1 |
| Устройство для контроля контактного нажатия размыкающего контакта электромагнитного реле | 1983 |
|
SU1117729A1 |
| Устройство для контроля рабочих зазо-POB элЕКТРОМАгНиТНОгО РЕлЕ | 1977 |
|
SU809069A1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ КОЭФФИЦИЕНТА СЦЕПЛЕНИЯ КОЛЕСА С ПОВЕРХНОСТЬЮ АЭРОДРОМНЫХ И ДОРОЖНЫХ ПОКРЫТИЙ | 2008 |
|
RU2369856C1 |
| Устройство для регулировки электромагнитной системы двухобмоточных поляризованных реле | 1982 |
|
SU1072135A1 |
1
Изобретение относится к технике измерения механических характеристик электромагнитных реле и может быть использовано при их разработке и изготовлении.
Известен способ измерения контактного нажатия путем сообщения корпусу геркона нарастающей угловой скорости до момента размыкания контактов и по ее величине судят о силе контактного нажатия 1.
Однако этот способ мало пригоден для определения жесткости упругих звеньев электромагнитного реле в виду различного конструктивного исполнения и отсутствия информации о величинах деформации.
Наиболее близким к предлагаемому по технической сущности является способ определения механических параметров электромагнитных реле путем приведения в движение якоря при подаче в обмотку реле постоянного тока и фиксации момента времени трогания якоря и подвижного контакта, момента замыкания контактов по изменению тока в зависимости от положения якоря 2.
Известный способ также не предусматривает непосредственного определения жесткости упругих элементов контактной и якорной системы, так как не позволяет определить силу притяжения в характерных точках траектории движения якоря.
Цель изобретения - расширение функциональных возможностей путем автомати5 ческого определения жесткости упругих элементов контактной и якорной систем реле.
Поставленная цель достигается тем, что согласно способу определения механических
,Q параметров электромагнитных реле путем приведения в движение якоря при подаче в обмотку реле постоянного тока и фиксации момента времени трогания якоря и подвижного контакта, момента замыкания контактов по изменению тока в зависимости от по15 ложения якоря, дополнительно реле сообщают угловое ускорение, противоположно направленное движению якоря, и фиксируют величину углового ускорения в момент трогания якоря и подвижного контакта и в момент замыкания контактов, и с учетом
20 момента инерции подвижных частей реле и величины хода якоря вычисляют коэффициенты жесткости упругих элементов.
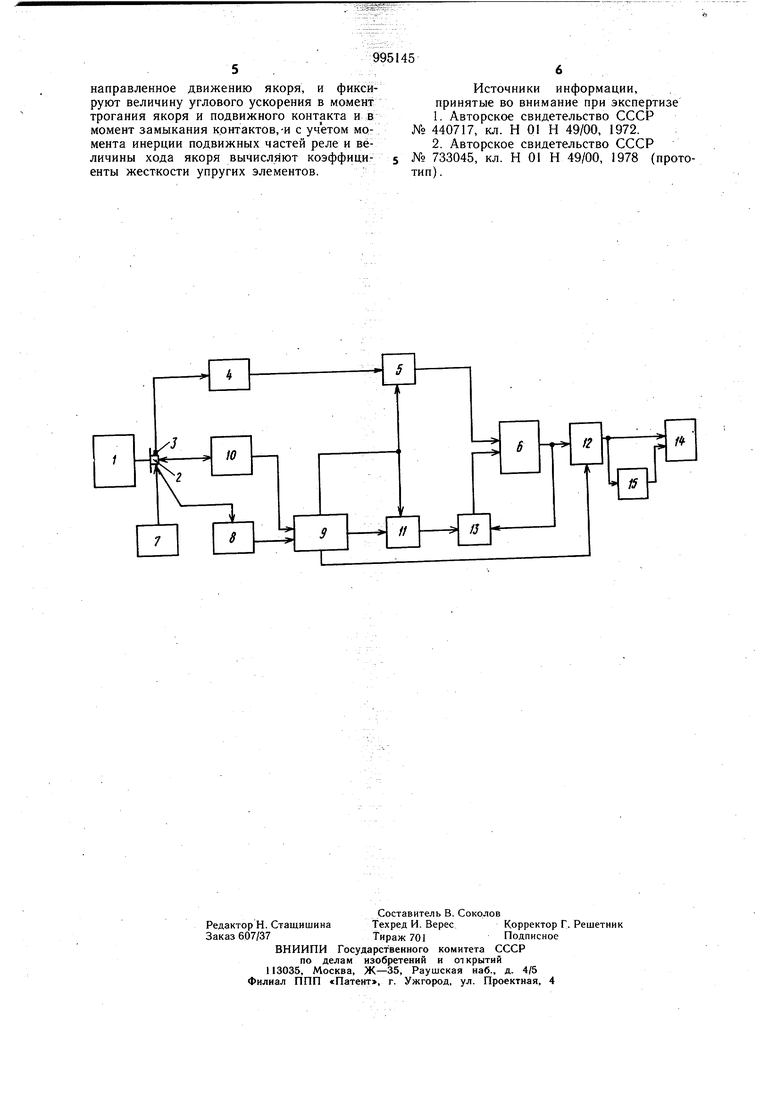
На чертеже представлена блок-схема устройства для реализации способа.
Устройство содержит электродвигатель 1 с регулируемым угловым ускорением ротора, на валу которого закрепляется испытуемое реле 2 так, что оси вала ротора и якоря реле совпадают.
Совместно с реле 2 укреплен датчик 3 угловых ускорений, выход которого соединен с входом усилителя 4. Электронный ключ 5 одним входом подсоединен к выходу усилителя 4, а выходом - к одному из входов усилителя 6. Блок 7 постоянного напряжения соединен с обмоткой испытуемого реле 2 и поддерживает постоянство электромагнитной силы притяжения якоря реле 2.
Для регистрации напряжения и тока к обмотке реле 2 подсоединен вход блока 8, выход которого подсоединен к одному из входов программного блока 9. Командный импульс, соответствующий моменту замыкания контактов испытуемого реле 2, выдает блок 10, вход которого соединен с обмоткой реле 2, а выход - с другим входом блока 9. Блок 9 соединен выходом с входом ключа 11, с одним из входов блока 12 памяти и другим входом ключа 5. Один вход блока перемножения 13 соединен с ключом 11, другой вход - с выходом усилителя 6, а выход - с другим входом усилителя 6. Выход усилителя 6 одновременно соединен с другим входом блока 12 памяти. Выход блока 12 памяти подключен к одному входу индикатора 14 и входу блока 15, выход которого подключен к другому входу индикатора 14.
Параметры жесткости упругих элементов контактной и якорной системы определяются на основе аналитических функциональных зависимостей.
c , c-fC, -:j-|-e2
e.
01
L.
0
-, .z+ 1
i.
e.
где с - коэффициент жесткости пружины якоря; С; - коэффициент жесткости пружины
подвижного контакта; ©1 -угол поворота якоря до момента
касания контактов; -угол поворота якоря до момента
полного замыкания контактов; , - угловое ускорение при поворота
якоря на угол ©i; 2 угловое ускорение при повороте
якоря на угол
Т - момент инерции подвижных частей реле.
Способ определения механических параметров электромагнитных реле осуществляется следующим образом.
Регулируя величину ускорения , действующего на реле, достигают того момента, когда якорь поворачивается на угол©.. В этот момент блок 8 выдает импульс для программного блока, который вырабатывает сигналы для открытия электронных ключей 5 и 11, и сигналы пропорциональные iH ©1 поступают на входы усилителя 6, на выходе которого образуется сигнал пропорциональный коэффициенту жесткости С. Одновременно из программного блока 9 поступает управляющий сигнал для блока 12 памяти, который запоминает значение С и передает ее в регистр индикатора 14. При дальнейщем увеличении ускорения достигают того момента, когда контакты реле замыкаются. В этот момент блок 10 выдает импульс, который также поступает в программный
блок 9. Последовательность действия устройства повторяется, однако в этом случае на выходе усилителя 6 образуется сигнал, пропорциональный жесткости С +Cj, который запоминается блоком 12 памяти, а в блоке 15 определяется значение Ci, поступающее на другой регистр индикатора 14. После этого один цикл использования устройства заканчивается и на индикаторе 14 визуализируются значения коэффициентов упругих элементов контактной и якорной систем реле.
Изобретение позволяет полностью автоматизировать процесс измерения упомянутых механических характеристик реле, что, в свою очередь, повышает точность и быстродействие измерений.
Параметры жесткости возвратных пружин якоря и контактных пружин обуславливают функциональные воз.можности реле и его качество, непосредственно влияют, на
виброустойчивость и вибропрочность реле, на время дребеза контактных пружин и якоря при срабатывании и отпускании реле. Жесткость пружин сильно зависит от качества сборки. Поэтому предлагаемый способ может быть использован при выходном
неразрущающем контроле реле из производства для их сортировки, а также для автоматизации процесса виброиспытаний электрома гнитных реле.
Формула изобретения
Способ определения механических параметров электромагнитных реле путем приведения в движение якоря при подаче в обмотку реле постоянного тока и фиксации момента времени трогания якоря и подвижного контакта, момента замыкания контактов по изменению тока в зависимости от положения якоря, отличающийся тем, что, с целью расширения функциональных возможностей способа путем автоматического определения жесткости упругих элементов контактной и якорной систем, дополнительно реле сообщают угловое ускорение, противоположно
направленное движению якоря, и фиксируют величину углового ускорения в момент трогания якоря и подвижного контакта ив момент замыкания контактов,-и с учетом момента инерции подвижных частей реле и величины хода якоря вычисляют коэффициенты жесткости упругих элементов.
Источники информации, принятые во внимание при экспертизе
№ 733045, кл. Н 01 Н 49/00, 1978 (прототип).
