Изобретение относится к горной автоматике и может быть использовано в электромагнитных молотках для отбойки угля и пород в угольных шахтах, а также на рудниках, на гранитных карьерах и других областях.
Целью изобретения является повышение надежности работы за счет устранения ударовпо корпусу и увеличение производительности за счет увеличения разгонной силы бойка путем переключения секций при обратном ходе бойка.
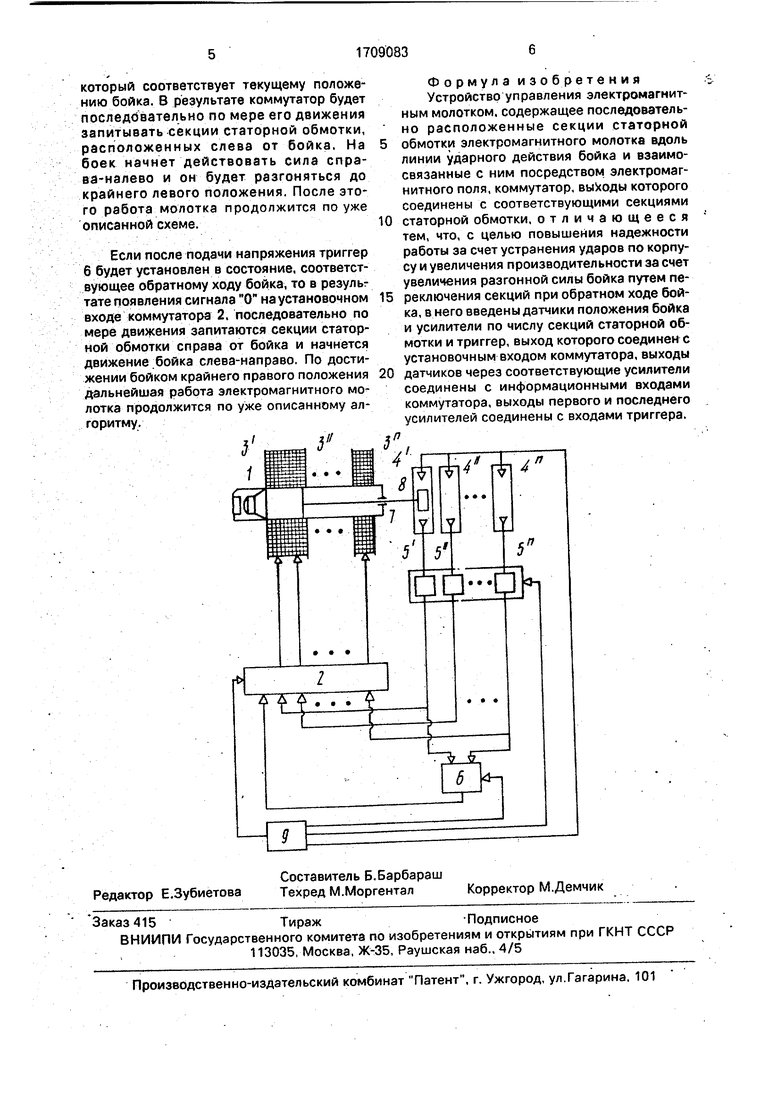
На чертеже приведена структурная схема устройства, где секции статорной обмотки электромагнитного молотка и боек даны в осевом разрезе.
Устройство содержит боек 1 с ферромагнитной частью и коммутатор 2, выходы которого соединены соответственно с секциями З, 3f..., 3 статорной обмотки электромагнитного молотка, 4, 4,...., 4 датчики положения бойка и усилители Б, б,...,5, триггером 6.
На чертеже также показано, что ударная часть бойка с помощью механической тяги 1 соединена с пластиной 8, воздействующей на чувствительный элемент того датчика, перед которым она находится в любой данный момент времени, Этим обеспечивается ерабатывание того датчика, перед секцией статорной электрической обмотки молотка которой находится в данный момент времени ферромагнитная часть бойка. С выходов блока 9 питания питающее напряжение подается на датчики положение, усилители, коммутатор и триггер.
Устройство работает следующим образом.
При включении блока 9 питания напряжение начинает подаваться сразу на датчики положения, усилители, коммутатор и триггер.
Рассмотрим три случая начала работы молотка в зависимости от того, в каком положении находится боек. Будем рассматривать случаи, когда боек находится в крайнем левом, промежуточном и крайнем правом положении. При нахождении бойка в крайнем левом положении после подачи питания сработает датчик положения 4. В результате этого на выходе усилителя 5 появится сигнал, который установит триггер 6 в устойчивое положение, при котором на выходе триггера 6 установится, например, сигнал О. Сигнал с выхода триггера 6 поступит на установочный вход коммутатора 2, а не его информационный вход будет поступать сигнал с выхода усилителя 5. В результате коммутатор запитает 2-ю секцию статорной обмотки, находящуюся справа от бойка, что приведет к появленинэ силы, действующей на боек слева-направо. Вследствие этого боек начнет движение вправо в направлении датчиков 4, 4,..., 4. При пересечении линии срабатывания датчика 4 к информационному входу коммутатора поступит сигнал с выхода усилителя 5, Это вызовет пересоединение очередной секции статорной обмотки коммутатором. При этом будет обесточена 2-я секция, в то время как будет запитана следующая за ней 3-я секция. Такое переключение на следующую.секцию будет происходить каждый раэ, когда боек будет пересекать линию срабатывания очередного датчика положения.
В резулы-ате этого вместе с движением бойка .будет осуществляться синхронное с этим движением перемещение магнитного поля секций статорной обмотки. Это обесг1ечит движение бойка Ьод действием максимальной силы.
При пересечении бойком линии действия датчика .положения 4 на В1 1ходе усилителя 5 появится сигнал, который перебросит триггер 6 в новое состояние, которому соответствует сигнал 1 на его выходе. Этот сигнал, поступая на установочный еход коммутатора 2 вызовет запитывание (п - 1) секции статорной обмотки находящейся слева от бойка. В
результате на боек начнет действовать сила, направленная справа-налево, что сначала приведет к торможению бойка, а затем к его разгону влево. При движении влево боек будет последовательно пересекать линии действия датчиков положения , 4 ,...,4 , При пересечении линии действия очередного датчика с выходов соответствующего усилителя на информационный вход коммутатора будет поступать соответствующий сигнал. В результате этого коммутатор будет подключать поочередно секции статорной обмотки блоку питaffия так, что при движении бойка влево также будет осуществляться синхронное переключение секций статорной обмотки, но теперь справа-налево, а движение бойка также будет происходить под действием максимальной силы.
При достижении бойком крайнего левого положения произойдет его удар по наковальне с одновременным срабатыванием крайнего левого датчика положения 4. Дальнейшая работа будет происходить по уже описанной схеме.
Если боек после включения напряжения находится в крайнем правом положении, то порядок работы устройства несколько изменится. Сначала сработает датчик положения 4, в результате чего на выходе усилителя 5 появится сигнал, который перебросит триггер 6 в состояние, когда на его выходе появится сигнал 1, что соответствует прямому ходу бойка. Одновременно с этим сигнал с выхода усилителя 5 поступит на информационный вход коммутатора 2, а сигнал с выхода триггера 6 поступит на установочный вход коммутатора 2. После чего коммутатор будет запитывать по уже описанной схеме секции статорной обмотки, расположенных слева от бойка, появится сила, действующая на боек справа-налево и начнется прямой ход бойка.
Работа устройства при прямом ходе бойка будет происходить в уже ранее описанном порядке.
И, наконец, после подачи питающего напряжения боек может находиться в промежуточном положении, когда не задействован ни крайний правый, 4, ни крайний левый 4датчики положения. В этом случае триггер 6 после подачи напряжения может самоустановиться в любое из двух состояний, которые соответствуют либо прямому, либо обратному ходу бойка.
Если триггер 6 будет установлен в поло-, жение, соответствующее прямому ходу, то соответствующий этому положению сигнал Г. поступит на установочный вход коммутатора 2. На информационные входы коммутатора 2 поступят сигналы с выхода усилителя.
который соответствует текущему положению бойка. В результате коммутатор будет последбвательно по мере его движений запитывать секции статорной обмотки, расположенных слева от бойка. На боек начнет действовать сила справа-налево и он будет разгоняться до крайнего левого положения. После этого работа молотка продолжится поуже описанной схеме.
Если после подачи напряжения триггер 6 будет установлен в состояние, соответствующее обратному ходу бойка, то в резулытате появления сигнала О на установочном входе коммутатора 2. последовательно по мере движения запитаются секции статорНой обмотки справа от бойка и начнется движение .бойка слева-направо. По достижении бойком крайнего правого положения дальнейшая работа электромагнитного молотка продолжится по уже описанному алгоритму.
Формула изобретения Устройство управления электромагнитным молотком, содержащее последовательно расположенные секции статорной
обмотки электромагнитного молотка вдоль линии ударного действия бойка и взаимосвязанные с ним посредством электромагнитного поля, коммутатор, выводы которого соединены с соответствующими секциями
статорной обмотки, отличающееся тем, что, с целью повышения надежности работы за счет устранения ударов по корпусу и увеличения производительности за счет увеличения разгонной силы бойка путем переключения секций при обратном ходе бойка, в него введены датчики положения бойка и усилители по числу секций статорной обмотки и триггер, выход которого соединен с установочным входом коммутатора, выходы
датчиков через соответствующие усилители соединены с информационными входами коммутатора, выходы первого и последнего усилителей соединены с входами триггера.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрическая машина ударного действия | 1990 |
|
SU1710720A1 |
| ЭЛЕКТРОПРИВОД ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ ИМПУЛЬСНОГО ВИБРОИСТОЧНИКА | 2012 |
|
RU2491709C1 |
| Система регулирования электромагнитного молота | 1986 |
|
SU1388556A2 |
| Электромагнитный привод ударного действия | 1990 |
|
SU1745920A1 |
| Электромагнитный привод ударного действия | 1986 |
|
SU1394388A1 |
| Электромагнитный привод ударного действия | 1987 |
|
SU1495947A1 |
| Электромагнитный привод ударного действия | 1986 |
|
SU1432679A1 |
| Устройство для управления двухфазным электромеханическим преобразователем | 1974 |
|
SU647829A1 |
| Электромагнитный привод ударного действия | 1986 |
|
SU1352607A1 |
| Устройство для управления гидравлическим ковочным прессом | 1986 |
|
SU1412994A1 |
Изобретение относится к горной автоматике и может быть использовано в электромагнитных молотках для отбойки угля и пород в угольных шахтах, а также на рудни-ках, на гранитных карьерах и др. областях. Цель изобретения ~ повышение надежности работы за счет устранения ударов по кор- пусу и увеличения производительности за " счет увеличения разгонной силы бойка путем переключения секций при обратном ходе бойка. Последовательно расположенные секции 3^..3" статорной обмотки электромагнитного молотка вдоль линии ударного действия бойка 1 переключаются при помощи коммутатора 2. Управление коммутатором осуществляет триггер 6 таким образом, что в любой момент движения бойка коммутатором 2 от блока 9 питания будет запиты- ваться соседняя к бойку секция статорной обмотки. Информация о положении бойка поступает с датчиков его положения 4\.. 4", соединенных через усилители 5\..!5" с информационными входами коммутатора 2. ^ 1 ил.«fe
| ЭЛЕКТРОМАГНИТНЫЙ МОЛОТОК | 0 |
|
SU281340A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Теория, расчет и конструирование электромагнитных машин ударного действия | |||
| Наука, Новосибирск, с | |||
| Скоропечатный станок для печатания со стеклянных пластинок | 1922 |
|
SU35A1 |
