Изобретение относится к области измерительной техники, а именно к области измерения деформации с использованием электрических средств.
Известен способ измерения деформаций гибкой связи передачи, заключающийся в измерении расстояний между фиксированными-точками гибкой связи.
Известен также способ измерения деформации гибкой связи передачи, заключающийся в том, что на гибкой связи закрепляют сдвинутые одна относительно другой метки, размещают два датчика прохождения меток вблизи траекторий перемещения гибкой связи, измеряют интервалы времени прохождения меток.между датчиками.
Наиболее близким к предлагаемому является способ измерения деформации гибкой связи передачи, заключающийся в том, что на гибкую связь с заданным шагом наносят метки, а вблизи траектории перемещения гибкой связи размещают на заданном расстоянии два датчика прохождения меток, измеряют интервалы времени между характерными точками сигналов обоих датчиков, один из которых равен интервалу времени между срабатываниями
о чэ ю
00
второго датчика от предшествующей метки и первого датчика от последующей за ней метки и по этим данным определяют деформацию гибкой связи..
Недостатком данного способа является невозможность измерения деформаций в области более высоких частот измеряемых деформаций.
Целью изобретения является расширение области применения способа в,сторону более высоких частот измеряемых деформаций.,
Поставленная цель достигается тем, что по известному способу измерения деформации гибкой связи передачи, заключающемуся в том, что на гибкую связь с заданным шагом наносят метки, а вблизи траектории перемещения гибкой связи размещают на заданном расстоянии два датчика прохождения меток, измеряют интервалы времени между характерными точками сигналов обоих датчиков, один из которых равен интервалу времени между срабатываниями второго датчика от предшествующей метки и первого датчика от последующей за ней метки и по этим данным определяют деформацию гибкой связи, второй измеряемый интервал принимают равным интервалу времени между срабатываниями первого и второго датчиков от одной и той же метки, шаг между метками выбирают меньшим половины длины волны продольных колебаний в гибкой связи при измерении деформаций наиболее высокой измеряемой частоты, метки с таким шагом наносят по всей длине гибкой связи так, чтобы выбранное значение шага обеспечивало постоянство расстояния между каждыми двумя метками на гибкой связи, а расстояние между датчиками устанавливают равным разности между величиной шага и максимальной величиной измеряемой деформации.
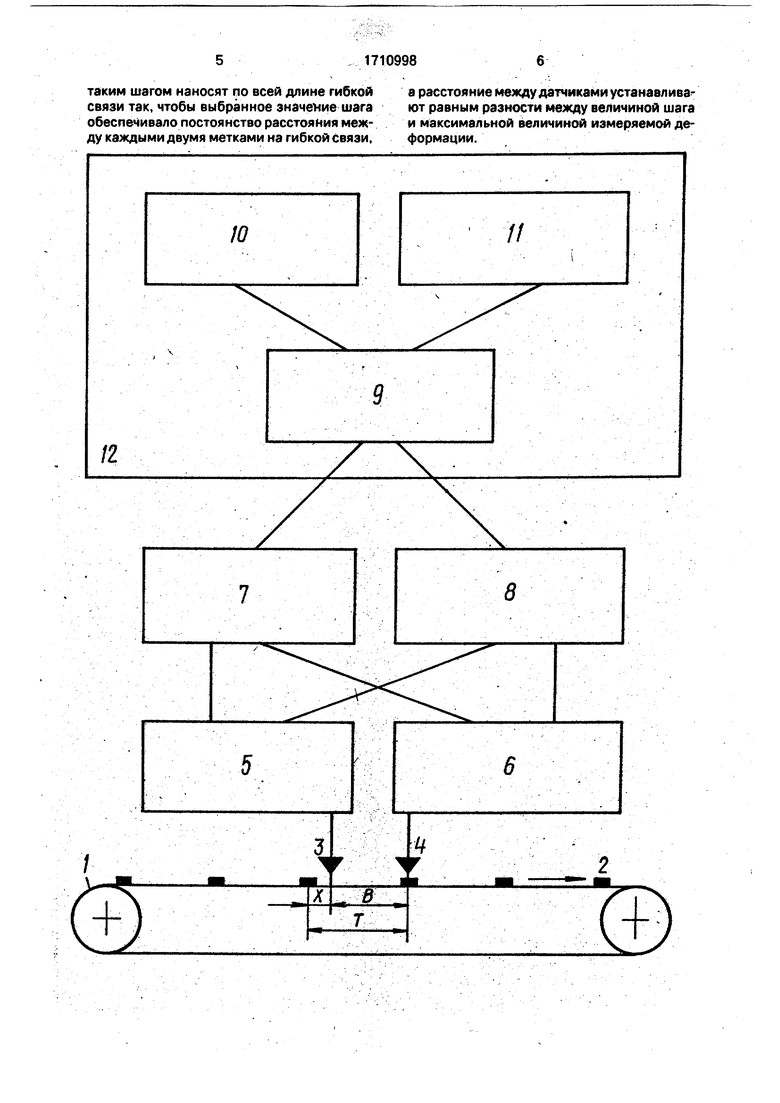
На чертеже представлена блок-схема устройства, реализующего предлагаемый способ.
Устройство, реализующее предлагаемый способ, содержит размещенные на заданном расстоянии В вблизи траектории движения гибкой связи 1, на которой нанесены с заданным шагом Т метки 2, например светоотражающие, импульсные датчики 3 и 4, например оптические, формирователи 5 и 6 импульсов, измерители 7 и 8 временных интервалов с входами Старт и Стоп, вычислительные устройства 9-11, Датчики через формирователи 5 и в импульсов соединены с входами измерителей 7 и 8 временных интервалов, причем так, что первый по ходу движения ремня датчик 3 соединен с входом Старт индикатора 7 времени и
одновременно с входом Стоп индикатора 8 времени. Второй по ходу Движения ремня датчик 4 соединен с входом Стоп индикатора 7 времени и одновременно с входом
Старт индикатора 8 времени. Выходы из- мерителей временных интервалов подсоединены к вычислительному устройству. При этом шаг между метками выбирают меньшим половины длины волны продольных ко0 лебаний в гибкой связи при измерении деформаций наиболее высокой измеряемой частоты. Для этого вычисляют оценку шага в миллиметрах по формуле Т1- V/F,
5 где V - скорость движения гибкой связи, мм/с;
F - максимальная частота измеряемых продольных колебаний гибкой связи, 1/с. Далее определяют приблизительное ко0 личество меток
У L/T1, где L - длина гибкой связи, мм.
Количество меток N и шаг Т (миллиметры) определяют по формулам
5N-IN l+l:
T L/N. где Nl - целая часть числа N.
Метки с таким шагом наносят по всей длине гибкой связи так, чтобы выбранное
0 значение шага обеспечивало постоянство расстояния между каждыми двумя метками на гибкой связи. Расстояние В между двумя датчиками устанавливают равным разности между величиной шага Т и максимальной
5 величиной измеряемой деформации X. Формул а изобретения Способ измерения деформации гибкой связи передачи, заключающийся в том, что на гибкую связь с заданным шагом наносят
0 метки, а вблизи траектории перемещения гибкой связи размещают на заданном расстоянии два датчика прохождения меток, измеряют интервалы времени между характерными точками сигналов обоих датчиков,
5 один из которых равен интервалу времени между срабатываниями второго датчика от предшествующей метки и первого датчика от последующей за ней метки, и по этим данным определяют деформацию гибкой
0 связи, о т л и ч а ю щ и и с я тем, что, с целью расширения области применения способа в сторону более высоких частот измеряемых деформаций, второй измеряемый интервал принимают равным интервалу времени
5 между срабатываниями первого и второго датчиков от одной и той же метки, шаг между метками выбирают меньшим половины длины волны продольных колебаний в гибкой связи при измерении деформаций наи- более высокой измеряемой частоты, метки с
таким шагом наносят по всей длине гибкой связи так, чтобы выбранное значение шага обеспечивало постоянство расстояния между каждыми двумя метками на гибкой связи.
а расстояние между датчиками устанавливают равным разности между величиной шага и максимальной величиной измеряемой деформации.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения деформаций гибкой связи передачи | 1978 |
|
SU688820A1 |
| Способ изготовления круговой шкалы | 1980 |
|
SU855398A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ПОВЕРХНОСТНОГО ПОКРЫТИЯ С ТИСНЕНОЙ ПЕЧАТНОЙ ПОВЕРХНОСТЬЮ | 2015 |
|
RU2687453C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ ПРИВОДКИ КРАСОК В МНОГОКРАСОЧНОЙ ПЕЧАТНОЙ МАШИНЕ | 1991 |
|
RU2015029C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ПОЛОЖЕНИЯ КЛАПАНА | 2010 |
|
RU2431071C1 |
| МЕТОЧНЫЙ ДАТЧИК АЭРОДИНАМИЧЕСКОГО УГЛА И ВОЗДУШНОЙ СКОРОСТИ | 2010 |
|
RU2445634C2 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ДВИЖЕНИЯ ОБЪЕКТА | 2015 |
|
RU2593442C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ КОНСТРУКЦИИ ЗДАНИЯ ИЛИ ИНЖЕНЕРНО-СТРОИТЕЛЬНОГО СООРУЖЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2678109C2 |
| СПОСОБ АВТОНОМНОЙ ВЫРАБОТКИ ИНФОРМАЦИИ ДЛЯ ПРОВОДКИ СУДОВ В УЗКИХ ФАРВАТЕРАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2097784C1 |
| Устройство для измерения длины,скорости и ускорения | 1985 |
|
SU1352184A1 |
Изобретение относится к технике измерения деформаций на подвижных объектах и может быть использовано для исследования в рабочих условиях гибких элементов ременных передач. Цель изобретения - расширение области применения способа в сторону более высоких частот измеряемых, деформаций. В способе наносят метку с ша го ой- И еах ваов ас в ых, а том, меньшим половины длины волны продольных колебаний в гибкой связи, по всей длине этой связи так, чтобы выбранное значение шага обеспечивало постоянство расстояния между каждыми двумя метками на гибкой связи. Датчики устанавливают на расстоянии, равном разности между величиной шага и максимальной величиной измеряемой деформации. При движении гибкой связи измеряют интервалы времени между срабатыванием второго датчика от предшествующей метки и первого датчика от последующей за ней метки, а также между срабатываниями первого и второго датчиков от одной и той же метки. Отношение этих двух величин умножают на расстояние между датчиками и вычисляют из него расстояние между метками для получения значения абсолютной текущей деформации. Дальнейшей обработкой результатов измерений выделяют статическую и динамическую составляющие деформации. 1 ил. ,- сл
ю
12
7
II
| СПОСОБ ПОТЫЛЯКО ЛЕЧЕНИЯ СКОЛИОЗА | 1995 |
|
RU2071310C1 |
| Способ измерения деформаций гибкой связи передачи | 1978 |
|
SU688820A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
