Изобретение относится к радиолокации, в частности к радиолокационному оборудованию судов, и может быть использовано для автономной навигации судов различного водоизмещения и назначения в сложных метеоусловиях вплоть до полного отсутствия видимости.
Известен способ автономной выработки информации для проводки судов в узких фарватерах в условиях ограниченной видимости, заключающийся в том, что посредством бортовой РЛС (БРЛС) осуществляют обзор окружающего пространства с отображением радиолокационной информации на экране индикатора в координатах угол азимута дальность. При этом используют БРЛС со сравнительно низким разрешением (25 50 м) и значительной мертвой зоной по дальности (25 50 м), дающие информацию о координатах радиолокационных (РЛ) ориентиров, расположенных на значительном удалении от судна (береговая линия, отдельные РЛ буи-отражатели).
Недостатком этого способа является сравнительно низкая точность определения необходимой для проводки навигационно-пилотажной информации: координат центра судна относительно границ фарватера, угла разворота оси судна относительно фарватера, направления вектора скорости судна, просвета между границами фарватера и сводами судна, что не позволяет осуществлять проводку крупнотоннажных судов по узким фарватерам и каналам в условиях плохой видимости, особенно при наличии сильного бокового ветра и свальных течений.
В настоящее время предпринимаются попытки решить эту проблему путем создания береговых РЛС с высоким разрешением по дальности и азимуту с передачей информации на борт судна по радиоканалу. Практика показывает, что при наличии волнения средней дальности этот способ не обеспечивает необходимой точности измерения параметров указанной навигационно-пилотажной информации за один период обзора РЛС, что приводит к необходимости использования цифровой обработки РЛ информации по результатам нескольких периодов обзора со сложными алгоритмами фильтрации и экстраполяции (тема "Фарватер", включающая тему "Причал ТМ" разработка алгоритмов фильтрации и сопровождения трасс). Однако даже если задача получения необходимой точности указанной информации и будет решена таким путем, сохраняется необходимость объективного контроля получаемой информации на судне, так как возможные сбои в радиоканале при отсутствии такого контроля могут привести к катастрофе.
Целью изобретения является повышение точности выработки навигационно-пилотажной информации для проводки судов в узких фарватерах и объективного контроля ее достоверности.
Поставленная цель достигается тем, что в способе автономной выработки информации для проводки судов в узких фарватерах, включающем РЛ обзор по азимуту с выводом информации на экран индикатора, обозначают границы фарватера двумя рядами буев-отражателей, принимают и отображают на экране индикатора отраженные сигналы вплоть до нулевой дальности, вычисляют разность текущего курсового угла судна и курса оси фарватера, отображают величину этой разности на экране индикатора в виде угловой метки направления, изменяют траекторию судна так, чтобы метка направления располагалась между изображением линий буев-отражателей, измеряют по экрану индикатора смещение метки направления относительно оси симметрии изображения линий буев-отражателей для оценки смещения центра относительно оси фарватера, отображают на экране индикатора диаметральную метку нулевого азимутального угла антенны и измеряют по экрану индикатора угол между этой меткой и меткой направления для оценки отклонения текущего курса судна от курса фарватера, измеряют предварительно расстояния от антенны до бортов судна под различными азимутальными углами антенны и отображают эти расстояния на экране индикатора в процессе каждого периода обзора, формируя тем самым синтезированное изображение контура судна, контролируют положение этого контура относительно радиолокационного изображения контура судна, оценивают величину зазора между изображением линий буев-отражателей и ближайшим к ним точкам синтезированного изображения контура судна для определения необходимого воздействия на курс и скорость судна, для чего в бортовую РЛС, содержащую антенну, передатчик, циркулятор, приемник, индикатор, причем выход передатчика через циркулятор соединен с выходом антенны, выход приемника соединен с первым входом индикатора, второй вход которого является входом сигнала азимутального угла антенны, выход синхросигнала передатчика соединен с входом синхросигнала приемника и с третьим входом индикатора, введены вторая антенна, переключатель, первый и второй сумматоры, причем первый вход переключателя соединен с вторым выходом циркулятора, второй вход с выходом второй антенны, а выход с входом приемника, управляющий вход соединен с выходом синхросигнала передатчика, выход первого сумматора, один вход которого является входом сигнала курсового угла судна, а второй вход входом сигнала текущего курса фарватера, соединен с первым входом второго сумматора, второй вход которого является входом сигнала азимутального угла антенны, а выход соединен с четвертым входом индикатора.
На фиг. 1 изображена функциональная схема бортовой РЛС, используемой для автономной выработки информации для проводки судов в узких фарватерах по данному способу, где
1 первая антенна;
2 передатчик;
3 циркулятор;
4 приемник;
5 индикатор;
6 вторая антенна;
7 переключатель;
8 первый сумматор;
9 второй сумматор.
Сущность способа поясняется на примере работы данной БРЛС.
БРЛС работает следующим образом.
Широкополосный сигнал с выхода передатчика 2 через циркулятор 3 поступает на вход первой антенны 1 и излучается в пространство, определяемое ДНА.
С небольшим упреждением относительно начала высокочастотного импульса передатчика выдается синхроимпульс на управляющий вход переключателя 7 для перевода его в выключенное состояние (при этом вход приемника 4 отключен от второго выхода циркулятора 3 и подключен к выходу второй антенны 6), а также на синхровходы приемника 4 для запуска схемы ВАРУ и индикатора 5 для запуска развертки по дальности и генератора меток дальности.
Отраженные сигналы с выхода первой антенны 1 начинают поступать на вход приемника 4 только с момента включения переключателя 7 в нормальное состояние, а до этого момента отраженные сигналы поступают на вход приемника 4 с выхода второй антенны 6. Этим обеспечивается работа БРЛС в ближней зоне вплоть до нулевой дальности. При этом угловое разрешение по азимуту обеспечивается в основном за счет первой антенны, работающей в ближней зоне только в режиме излучения. Поэтому вторая антенна может иметь на порядок меньший горизонтальный размер, чем первая.
Таким образом обеспечивается работа БРЛС без мертвой зоны по дальности даже при излучении, например, длинных зондирующих импульсов с частотной модуляцией, но не превышающих длительность времени нахождения переключателя 7 в состоянии подключения к выходу второй антенны 6.
В приемнике 4 осуществляется усиление, временная автоматическая регулировка усиления, сжатие сигналов по длительности, детектирование. Если дальнейшая обработка сигнала производится в цифровом виде, то в состав приемника включается также аналого-цифровой преобразователь, например, типа "Варса 5".
Сигнал с выхода приемника 4 поступает на первый вход индикатора 5, где осуществляет яркостную или цветовую модуляцию его экрана, формируя тем самым изображение двух линий буев-отражателей и контура судна.
В первом сумматоре 8 производится вычитание из сигнала текущего курсового угла судна α, поступающего от курсового датчика судна на первый вход сумматора, сигнала текущего курса фарватера b, поступающего на второй вход сумматора с пульта управления штурмана.
Полученный сигнал разности поступает на вход второго сумматора 9, где суммируется с сигналом текущего азимутального угла антенны g, поступающим от датчика азимутального угла антенны.
Полученный сигнал суммы поступает на четвертый вход индикатора 5.
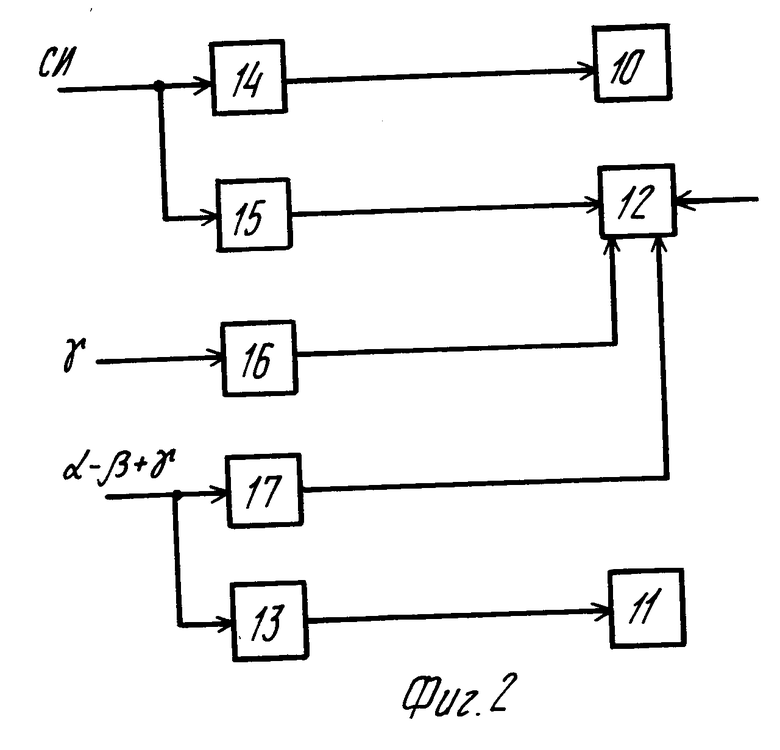
На фиг. 2 изображена функциональная схема варианта выполнения индикатора, отображающего информацию в прямоугольных координатах азимут-дальность, где
10 отклоняющий блок по вертикали;
11 отклоняющий блок по горизонтали;
12 модулятор;
13 преобразователь сигнала горизонтальной развертки;
14 генератор сигнала вертикальной развертки;
15 генератор меток дальности;
16 и 17 первый и второй компараторы соответственно.
В индикаторе сигнал суммы a - β + γ поступает на входы преобразователя сигнала горизонтальной развертки 13, выполненного, например, в виде усилителя мощности, и компаратора 17, выполненного, например, в виде схемы сравнения.
Сигнал с выхода преобразователя 13 поступает на вход отклоняющего блока по горизонтали 11, а сигнал с выхода второго компаратора 17 на вход модулятора 12, формируя метку направления в момент равенства нулю сигнала на входе компаратора 17, а также серию угловых меток в моменты времени, когда входной сигнал приобретает соответствующие заданные значения.
Сигнал азимутального угла антенны g поступает на вход первого компаратора 16, являющийся вторым входом индикатора, в котором формируется угловая метка нулевого азимутального угла антенны в момент, когда входной сигнал компаратора приобретает нулевое значение (эта метка представляет на индикаторе изображение оси судна), и серия меток, дальности которых являются заданной функцией g в моменты времени, когда текущее значение сигнала g приобретает заданные значения.
Таким образом, на экране индикатора представлена неподвижная метка, совпадающая с вертикальной осью экрана индикатора, серия угловых меток, расположенных симметрично относительно осевой линии, подвижная метка нулевого азимутального угла, формирующего на экране индикатора изображение продольной оси судна, и серия меток, формирующих изображение контура судна в данном периоде обзора РЛС.
В том случае, если антенна БРЛС судна находится точно в вертикальной плоскости, совпадающей с осью фарватера, то РЛ изображение буев-отражателей симметрично относительно осевой линии экрана индикатора, а метка нулевого азимутального угла антенны показывает угол разворота продольной оси судна относительно оси фарватера. Это утверждение справедливо при отсутствии ошибок в измерении курсового угла судна соответствующим датчиком (компасом) или в установке значения курса фарватера в данной точке штурманом или автоштурманом.
Если изображение линий булев-отражателей симметрично относительно любой вертикальной линии экрана индикатора, а эта линия не совпадает с меткой направления (осевой линией индикатора), то это означает, что в курсовой системе или в системе установки текущего значения курса фарватера существует систематическая ошибка, которая должна быть устранена соответствующим корректором, например корректором курсовой системы, путем совмещения метки направления с осью симметрии РЛ изображения линий буев-отражателей. Таким образом, данный способ обеспечивает не только автономную выработку информации для проводки судов по узким фарватерам, но и корректировку курсовой системы.
Синхросигнал поступает на вход генератора сигнала вертикальной развертки 14, управляющего работой отклоняющего блока по вертикали 10, и на вход генератора меток дальности 15, являющиеся третьим входом индикатора.
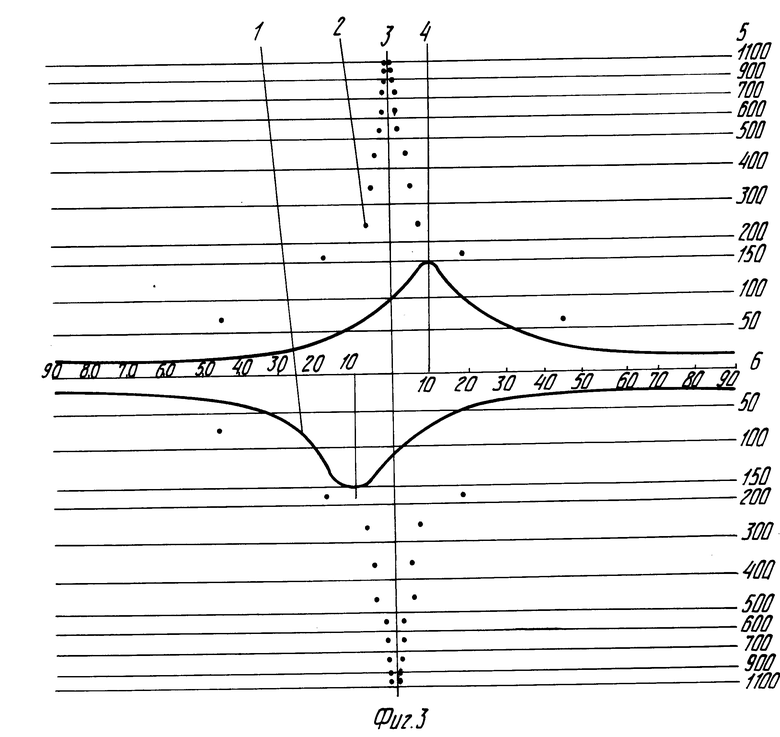
На фиг. 3 дан пример представления информации на экране индикатора для случая, когда БРЛС установлена в эпицентре судна длиной 300 м, шириной 50 м, идущего строго по оси фарватера шириной 100 м, обозначенного буями-отражателями, установленными с шагом 100 м, со сносом 10o, где
1 синтезированное изображение контура судна;
2 РЛ изображение буев-отражателей;
3 метка направления;
4 метка нулевого азимутального угла антенны БРЛС (синтезированное изображение оси судна);
5 шкала дальностей;
6 шкала азимутальных углов.
Развертка индикатора по дальности имеет семь линейных участков по 300 м каждый с масштабами, изменяющимися в два раза при переходе от одного участка к другому по мере возрастания дальности. При этом зона обзора по дальности составляет 2200 м.
Развертка индикатора по азимуту в данном примере линейна. Однако с целью повышения точности отсчета относительно курса судна и точности извлечения информации о боковом отклонении от оси фарватера развертка может быть выполнена также нелинейной с повышенной крутизной в зоне малых углов азимута.
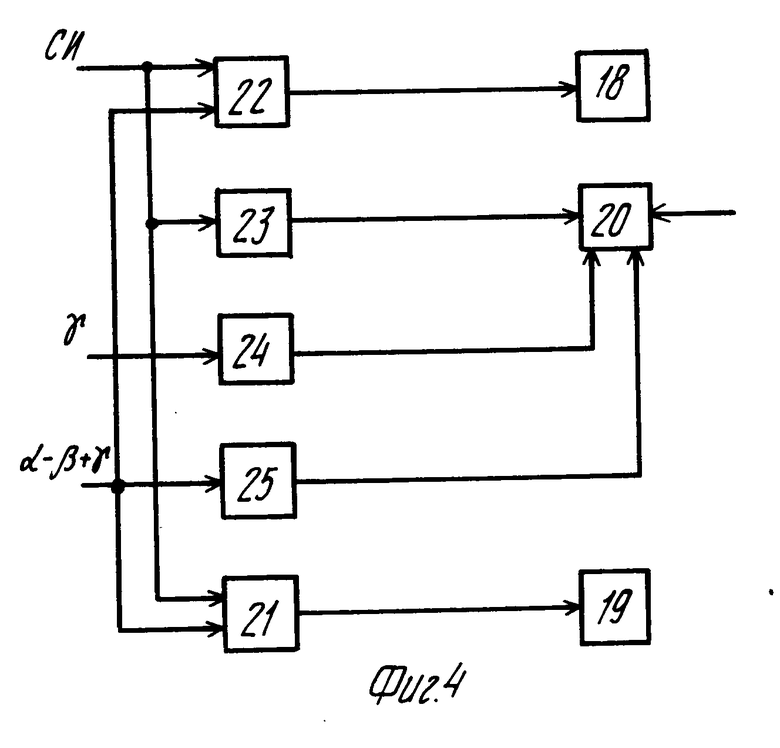
На фиг. 4 изображена функциональная схема другого варианта выполнения индикатора, отображающего информацию в полярных координатах азимут-дальность, где
18 отклоняющий блок по вертикали;
19 отклоняющий блок по горизонтали;
20 модулятор;
21 генератор сигнала горизонтальной развертки;
22 генератор сигнала вертикальной развертки;
23 генератор меток дальности;
24 и 25 первый и второй компараторы соответственно.
В этом индикаторе синхросигнал поступает одновременно на первые входы генераторов сигналов горизонтальной 21 и вертикальной 22 разверток и вход генератора меток дальности 23, являющиеся третьим входом индикатора. На вторые входы этих генераторов и вход второго компаратора 25, являющиеся четвертым входом индикатора, поступает сигнал суммы a - β + γ.
Сигналы горизонтальной и вертикальной разверток с выходов элементов 21 и 22, умноженные на sin (α - β + γ) и cos(α - β + γ) соответственно, поступают на входы отклоняющих блоков по горизонтали 19 и вертикали 18, в результате чего формируется радиальная развертка по дальности.
В остальном работа второго варианта индикатора аналогична работе первого.
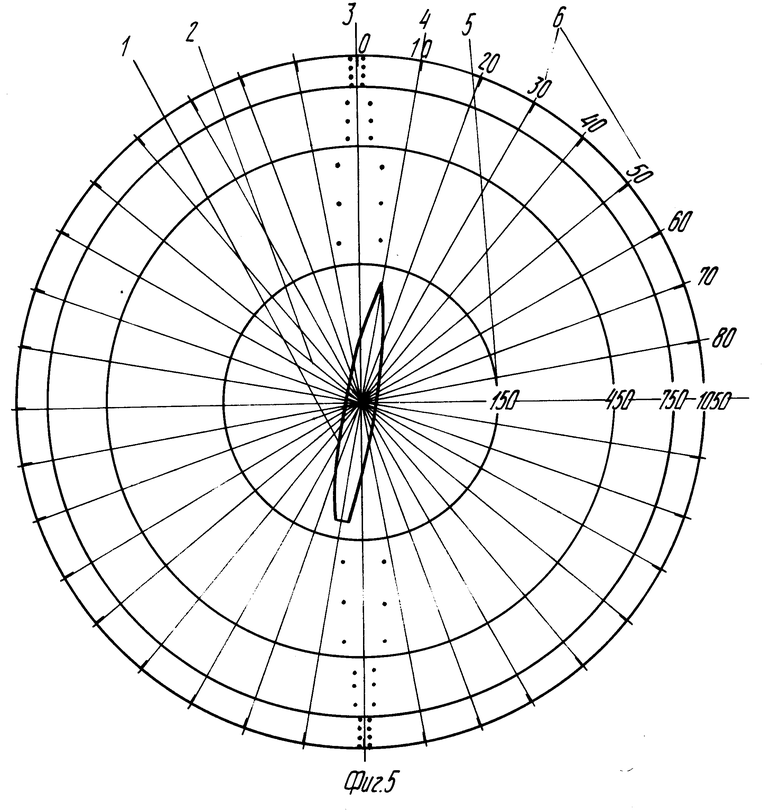
На фиг. 5 дан пример представления информации на индикаторе с радиально-круговой разверткой для того же случая, что и на фиг. 3, где цифрами 1 6 обозначены те же элементы изображения, что и на фиг. 3.
Из рассмотрения фиг. 3 и 5 следует, что при данном размере экрана индикатора и масштабах по дальности надежно индицируется зазор между изображением судна и буев-отражателей в 2,5 5 м.
При разрешающей способности БРЛС 7,5 м по дальности (длительность импульса 0,05 мкс) и 1o по азимуту (горизонтальный размер антенны на волне 3 см около двух метров) погрешность в измерении координат буя-отражателя на дальности до 200 м составит σ ≅ ± 1,2 м по дальности и σ ≅ ± 0,81 м по азимуту. Точность отсчета относительного курса составит s ≅ ± 0,3o. Максимальная погрешность измерения отклонения центра судна от оси фарватера составит около ± (2,5 5) м.
Требуемая длительность импульса может быть получена путем использования передатчика, генерирующего частотно-модулированные (ЧМ) импульсы длительностью в несколько микросекунд, и приемника со сжатием импульса, в которых применяются существенные фильтры формирования и сжатия излученных импульсов в 400 раз.
Характер отображения данной информации обеспечивает надежный контроль ее достоверности. Так сравнение РЛ изображения судна (на фиг. 3 и 5 не приведено) с изображением его контура, получаемого за счет использования априорной информации, а также конфигурации РЛ изображения множества буев-отражателей позволяют объективно контролировать качество работы БРЛС.
При скорости судна 20 км/ч (5,5 м/с) приемлемый период обзора БРСЛ составит 1 5 с.
В настоящее время большинство судов различного назначения оборудованы обзорными БРЛС значительного радиуса действия, используемых для целей судовождения по береговым и надводным РЛ ориентирам, в том числе и в сложных метеоусловиях.
Недостатком существующих БРЛС является наличие значительной мертвой зоны по дальности. Следовательно, для осуществления предложенного способа необходима и достаточна замена таких БРЛС на БРЛС нового поколения, построенных по предложенной схеме, имеющих в добавление к существующим режимам режим работы с высоким разрешением по дальности и нулевой мертвой зоной, а также повышенной скоростью вращения антенны, использующих современную элементную базу (твердотельные передатчики с частотной модуляцией или фазовой манипуляцией зондирующих импульсов и приемники со сжатием импульсов). Такая замена может быть проведена в рамках программы модернизации РЛ оборудования судов с целью повышения надежности и эксплутационных характеристик за счет перехода на новую элементную базу.
Необходимая для использования этого способа установка буев с РЛ отражателями вдоль границ каналов на мелководных акваториях с шагом 50 100 м очевидно незначительно увеличит затраты на эксплуатацию этих трасс. Подбором размера буя-отражателя всегда может быть обеспечено превышение полезного сигнала на 10 20 дБ над сигналом, отраженным от поверхности воды в элементе разрешения 7,5 х 5 м даже при сильном волнении.
Затраты на осуществление указанных мероприятий будут значительно ниже экономической и экологической выгоды, получаемой за счет повышения безопасности, регулярности и скорости проводки судов по узким фарватерам.
Изобретение относится к радиолокации и может быть использовано для навигации судов, маневрирующих в узкостях. Сущность изобретения: границы узкости, к примеру узкого фарватера, оборудуют рядами буев-отражателей, принимают и отображают на экране индикатора отраженные сигналы вплоть до нулевой дальности, вычисляют разность текущего курсового угла судна и курса оси фарватера, отображают величину этой разности на экране индикатора в виде угловой метки направления, изменяют траекторию судна так, чтобы метка располагалась между изображением линий буев-отражателей, измеряют по экрану индикатора смещение метки направления относительно оси симметрии изображения линий буев-отражателей для оценки смещения центра судна относительно оси фарватера, отображают на экране контур судна, оценивают величину зазора между линиями буев-отражателей и ближайшими к ним изображением контура судна для определения необходимого воздействия на курс и скорость судна, используя для этого бортовую РЛС с дополнительными устройствами, позволяющими реализовать действия предлагаемого способа. 5 з.п. ф-лы, 5 ил.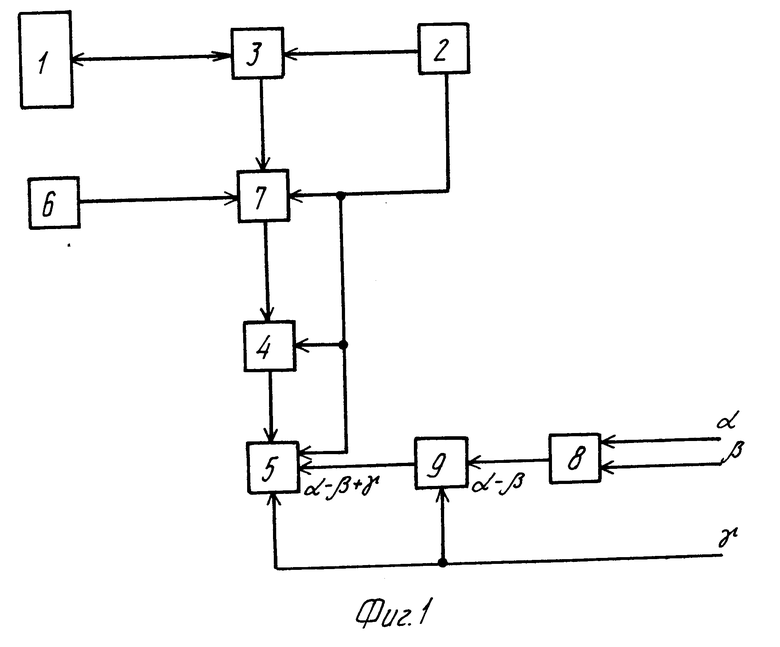
| Судовые радиолокационные станции: Сборник | |||
| - М.: Транспорт, 1986, с | |||
| Способ получения смеси хлоргидратов опийных алкалоидов (пантопона) из опийных вытяжек с любым содержанием морфия | 1921 |
|
SU68A1 |
