Изобретение относится к контрольно- измерительной технике и предназначено для реализации параметров движения автомототранспортного средства (АМТС).
Цель изобретения - повышение качества контроля параметров движения АМТС.
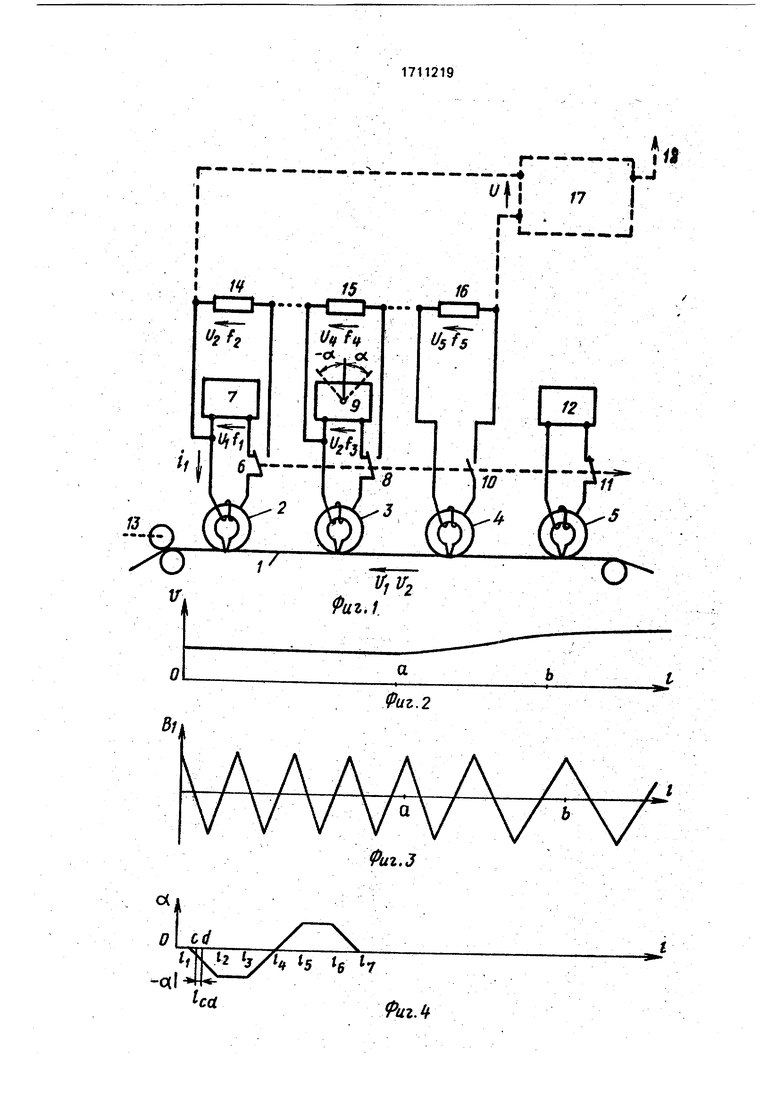
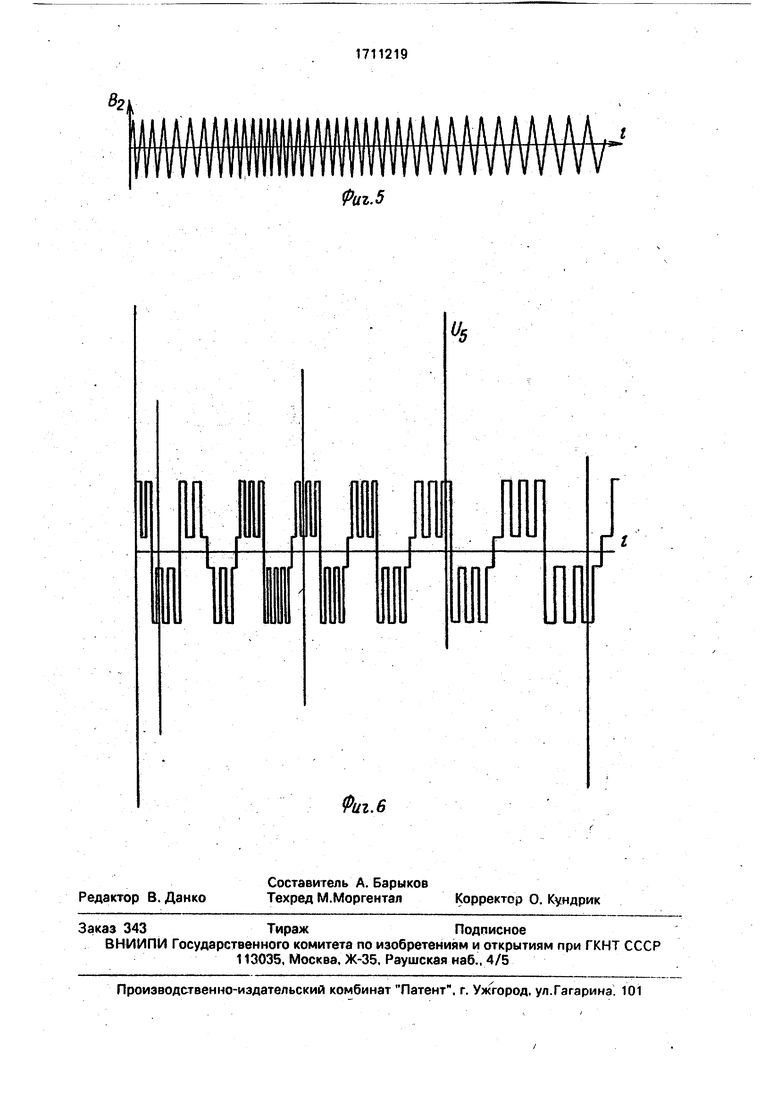
На фиг. 1 изображена принципиальная электрическая схема устройства для реализации способа регистрации данных; на фиг... 2 - график скорости движения АМТС в зависимости от пути; на фиг. 3 - график намагниченности первой дорожки магнитоносителя; на фиг. 4 - график угла отклонения управляющего колеса транспортного средства; на фиг. 5 - график намагниченности второй дорожки магнитоносителя: на фиг. 6 - график суммарного сигнала на входе радиопередатчика.,
Устройство для реализации предлагаемого способа регистрации данных для контроля качества движения АМТС содержит трехдорожечную магнитную ленту (магнито- носитель) 1, контактирующую с двумя универсальными магнитными головками 2 и 3, воспроизводящую магнитную головку 4„ стирающую магнитную головку 5. Обмотка магнитной головки 2 через переключатель 6 связана с генератором 7 стабильной частоты f 1. Обмотка магнитной головки 3 через переключатель 8 связана с генератором 9 частоты fa, зависящей от угла а отклонения управляющего колеса. Обмотка магнитной головки 4 включается переключателем 10 во время воспроизведения записанных сигналов. Магнитная головка 5 через переключатель 11 связана с источником 12 стйрающего напряжения. Рабочий зазор головки 5 перекрывает только первую и вторую дорожки магнитной ленты 1. Приводной ролик 13 (привод) магнитной ленты кинематически связан с колесами АМТС. Резисторы 14-16 являются нагрузками магнитных головок, которые при считывании информации могут соединяться последовательно и подключаться к передающему устройству 17 (радиопередатчику) с антенной 18.
На контрольном пункте размещено приемное устройство с антенной, связанное с двоичными счетчиками, цифровой вычислительный автомат, дешифратор, постоянное запоминающее устройство (ПЗУ), цифровой компаратор, сигнальное устройство и внешнее запоминающее устройство.
. Устройство работает следующим образом-.
Допустим, что скорость АМТС при движении в пути I изменяется по графику (фиг. 2). Так как привод магнитной ленты 1 осу- и1ествляется от колес АМТС, скорость движения ленты vi пропорциональна СД АМТС:
V К VI,
где k - передаточное число от колес АМТС до приводного ролика 13.
Частота fi генератора 7 стабильна, поэтому при неравномерной скорости движения АМТС длина волны сигнала, записанного головкой 2 на первую дорожку магнйтоносителя 1, прямо пропорциональна СД АМТС (фиг. 3).
j При воспроизведении переключателем 6 обмотка магнитной головки 2 подключается к выходному резистору 14, ролик 13 приводится в равномерное вращение (приводом, не показанным на фиг. 1) и на выходе появляется напряжение U2 частотой fa. При этом
Г2.ми.
где va - скорость движения ленты 1 при воспроизведении.
Для записи угла отклонения управляющего колеса АМТС служит вторая дорожка магнитной ленты 1, с которой контактирует магнитная головка 3. На обмотку этой головки поступает напряжение Уз частотой fs с генератора 9. Орган настройки частоты этого генератора механически связан с рычагом руля АМТС. При повороте руля в генераторе 9 изменяется один из управляющих параметров его схемы (емкость конденсатора, индуктивность или активное сопротивление контура), от которого зависит частота fa. с углоМ а находящаяся в соотношении
f3 kya+fo, где f0 f3. когда а- 0, т.е. АМТС движется
прямо;
ky - переводной коэффициент. Допустим, что АМТС совершает обгон. В точке И (фиг. 4) водитель начал поворачивать руль в отрицательном направлении (например влево). Угол а на участке И la увеличивался от нуля до определенной величины. Потом на некотором участке г з этот угол оставался неизменным, а далее на участке з 14 уменьшался до нуля. При этом
АМТС повернулось относительно оси дороги на некоторый угол. Чтобы для обгона выстроиться в левый ряд, на участке Ц Is руль поворачивали в положительном направлении (вправо) и увеличивали скорость
движения АМТС. Генератор 9 при этом, в соответствии с (1), изменял частоту fs. На участке li la частота уменьшалась, потом на участке она увеличивалась, а на участке 1б - 1т возвратилась к значению fa fo. На
магнитную ленту 1 головка 3 этот процесс записывает так, как это изображено на фиг. 5. Дальнейшее уменьшение частоты на этом графике при # 0 связано нес изменением угла а, а с увеличением скорости движения,
т.е. v (фиг. 2) и соответственно vi.
Во время воспроизведения лента 1 должна перемещаться приводом 13 с постоянной, скоростью va. Для этого на третьей дорожке равномерно записаны синхронизирующие импульсы, которые, считываются воспроизводящей головкой 4 в виде напряжения Us частотой fs. Эти импульсы можно подавать на схему корректировки скорости привода 13, которая, однако, усложняет и
удорожает устройство. Более целесообраз- но эти импульсы подавать в компьютер одновременно с импульсами, считываемыми с первой и второй дорожек для соответствующего учета возможной неравномерности
движения ленты 1 при считывании.
Если передача на контрольный пункт осуществляется дистанционно по радио, то резисторы 14-16 соединяются последовательно и суммарное их напряжение подается на вход радиопередатчика 17, Форма этого напряжения для случая, когда напряжения Lh и 11з имеют треугольную форму, показана на фиг. 6. На радиопередатчике это напряжение модулируется соответстеующей высокой частотой и передается на приемное устройство пункта контроля, где оно детектируется и расфильтровывается на три составляющие, для чего разница между частотами fa, f4 и fs должна отвечать соответствующим требованиям. Двоичные счетчики подсчитывают количество импульсов, записанное и считываемое соответственно головками 2 и 3 на первой и второй дорожках магнитной ленты в промежутках между импульсами, считанными с третьей дорожки головкой 4. Нестираемые импульсы третьей дорожки записаны равномерно и расстояние между двумя соседними импульсами соответствует длине элемента пу- ти led (например, 20 см).
С приходом каждого последующего импульса с головки 4 показания счетчиков сначала перезаписываются в цифровой вычислительный автомат, например, фрон- том этого импульса, после чего счетчики обнуляются, например, срезом этого же импульса, и начинается новый счет. Счетчик подсчитывает импульсы, возникающие на резисторе 16, и его показания соответство- вать пройденному транспортным средством расстоянию от точки пути, где начался счет, например, в обратном направлении, которое удобно для определения координат точек пройденной транспортным средством траектории. .....
По показаниям счетчиков цифровой вычислительный автомат при поступлении каждого 1-го импульса из резистора 16 производит вычисление следующих величин (формулы составлены для случая движения ленты 1 в обратном направлении):
Скорость движения транспортного средства на 1-м элементе пути
k led f-i ki
mi . mi где k - передаточное число привода ленты;
led - длина элемента пути;
fi - частота генератора 7;
mi - число импульсов, записанное на первую дорожку ленты на 1-м элементе пу- ти;
ki - постоянное число.
Линейное ускорение
(vi-V().)fi
mi
Угол поворота руля
VI
ЭлГ
а (fi
П| ГЛ1
- 4
где ni - число импульсов, подсчитанное счетчиком 22;
ky - переводной коэффициент;
fo - частота генератора 9 при а 0.
аЦ1:
2 У (а - у,) k-lcdci
где ) arcsin ((1 k Al А
)sln
A sin (a - у). 01 sino)
А - база транспортного средства, т.е. расстояние между осями переднего и заднего колеса.
Полное, ускорение
аг
vaiji + ац|
Резкость поворота ская), л . 1 ,
,01 -«(|+1)
rtrv
Скорость поворота д da
Ж
я
Qj - а( + i) .
mi
fi.
Координаты точек следования транспортного средства
Xi X(i + 1) + ci sin (Ai + 001. Yi YO +1) + ci cos (Ai + at),
гдеА| А(м)+ ад Я;
AI, A(i-i) - азимуты смежных элементов пути.
Пройденный путь с начала отсчета
S.-N-k-Al,
где N - число импульсов, зарегистрированное счетчиком.
Высчитанная величина S подается на вход дешифратора, выход которого связан с входом постоянного запоминающего устройства, в памяти которого хранятся допустимые контролируемые величины для всех элементов подконтрольного участка пути. Выходы элементов связаны между собой цифровым компаратором, который сравнивает текущие результаты вычислений с допустимыми для каждой точки пути и при определенных отклонениях включает сигнальное устройство, сигнализирующее инспектору о необходимости принятия Соответствующих мер. Результаты вычислений с выхода цифрового вычислительного автомата подаются также во внешнее запоминающее устройство, например с последовательным доступом, где хранятся до тех пор, пока не отпадет в них потребность.
Формул а изобретен ия 1. Способ регистрации данных для контроля качества выполнения маневров ав- томототранспортными средствами, заключающийся в том, что на магнитный носитель, движущийся со скоростью, пропорциональной скорости транспортного средства, записывают на первую дорожку сигнал стабильной частоты, измеряют частоту этого сигнала при его воспроизведении с магнитного носителя, движущегося с постоянной скоростью, и по ней определяют скорость движения транспортного средства, отличающийся тем, что, с целью повышения качества контроля параметров движения автомототранспортных средств, на второй дорожке носителя записывают при движении транспортного средства сигнал, частота которого равна
fa-kyaf fo. . :
где ky - переводной коэффициент;
а-угол поворота управляющих колес;
Р0 т3при ,
считывают записанные сигналы с магнитного носителя при его равномерном движении, по частоте которых определяют параметры, характеризующие качество управления транспортным средством: скорость движения транспортного средства на 1-м элементе пути
VI
где k - передаточное число привоза магнитной ленты от колес транспортного средства;
led - эталонная длина элемента пути,
f 1 - частота генератора стабильной частоты;
mi - число импульсов, записанное на первую дорожку магнитного носителя;
ki - постоянное число, линейное ускорение
(Vi-V(i + t))fi m,
угол поворота руля
аЛ|
П|
«-№Ј-.)
1 V
где ni - число импульсов, записанное на вторую дорожку магнитного носителя, центробежное ускорение
Зц|
2 У (oi - yi) k-lcdCf
k AI где yi arcsln ((1 - ---) -sin a i);
cr
A sin (a - yi) . sin 03
15
А- расстояние между осями передних и задних колес транспортного средства, полное ускорение
Y2 , 2 Эл + Эц| .
резкость поворота руля Я
, q-0(1+1) klcd
da Ж:
f ft
скорость поворота руля Q -г-;
at
(44).fl.
mi
5
0
5
0
2, Устройство для регистрации данных для контроля качества выполнения маневров автомототранспортными средствами, содержащее магнитный носитель информации, привод которого кинематически связан с колесами автомототранспортного средства, универсальную магнитную головку, контактирующую с первой дорожкой магнитного носителя и обмотка которой при записи сигнала электрически связана с генератором стабильной частоты, воспроизводящую магнитную головку, контактирующую с магнитным носителем, на котором записаны синхронизирующие импульсы, отличающееся тем, что оно содержит дополнительную,магнитную головку, контактирующую с второй дорожкой магнитного носителя, генератор частоты с .органом настройки, механически связанным с рулевым рычагом управляющего колеса транспортного средства и электрически с обмоткой дополнительной магнитной головки.
Фиг.З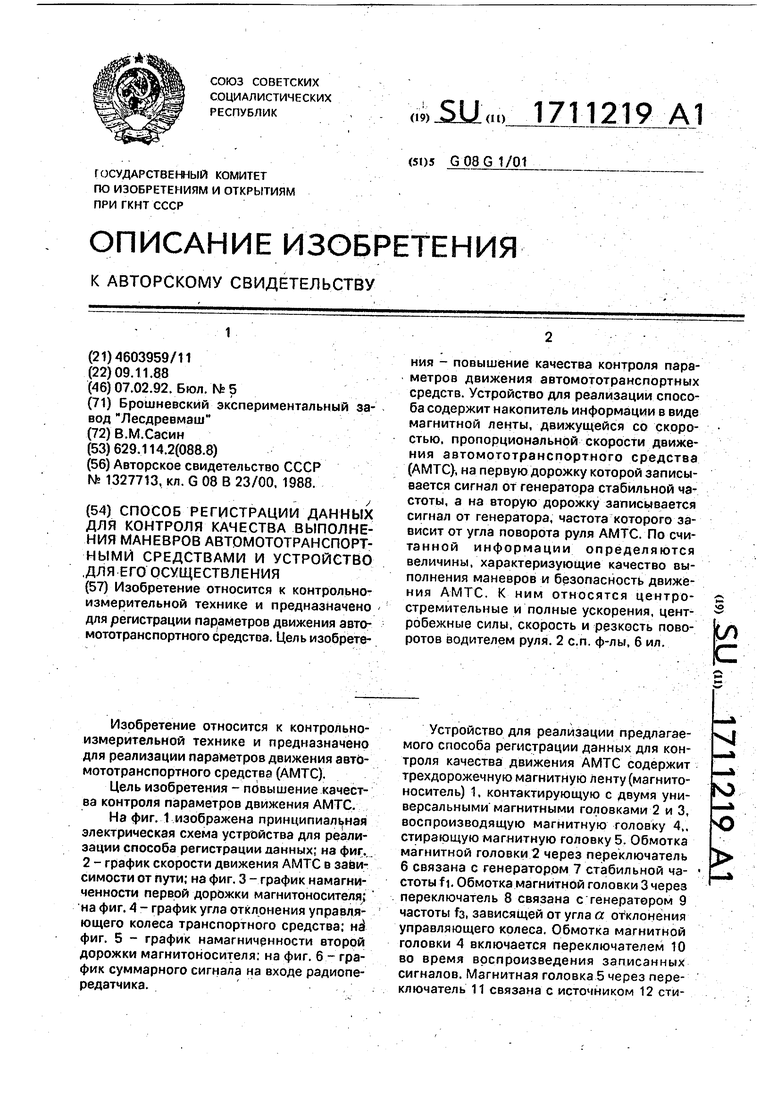

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство контроля параметров движения транспортного средства | 1988 |
|
SU1693622A1 |
| Устройство контроля параметров движения транспортного средства (чёрный ящик) | 2022 |
|
RU2787806C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СКОРОСТИ ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2018128C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СКОРОСТИ ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2262707C1 |
| УСТРОЙСТВО КОНТРОЛЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2434291C1 |
| УСТРОЙСТВО КОНТРОЛЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2308766C2 |
| УСТРОЙСТВО КОНТРОЛЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2481641C2 |
| Устройство контроля параметров движения транспортного средства | 2019 |
|
RU2741668C1 |
| УСТРОЙСТВО КОНТРОЛЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА (ЧЕРНЫЙ ЯЩИК) | 2017 |
|
RU2651935C1 |
| СПОСОБ ЗАПИСИ И ВОСПРОИЗВЕДЕНИЯ ИНФОРМАЦИИ НА МАГНИТНЫХ ПОЛОСАХ И СООТВЕТСТВУЮЩЕЕ УСТРОЙСТВО СЧИТЫВАНИЯ/ЗАПИСИ | 1996 |
|
RU2183858C2 |
Изобретение относится к контрольно- измерительной технике и предназначено для регистрации параметров движения авто- мототранспортного средства. Цель изобретения - повышение качества контроля параметров движения автомототранспортных средств. Устройство для реализации способа содержит накопитель информации в виде магнитной ленты, движущейся со скоростью, пропорциональной скорости движения автомототранспортного средства (АМТС), на первую дорожку которой записывается сигнал от генератора стабильной частоты, а на вторую дорожку записывается сигнал от генератора, частота которого зависит от угла поворота руля АМТС. По считанной информации определяются величины, характеризующие качество выполнения маневров и безопасность движения АМТС. К ним относятся центростремительные и полные ускорения, центробежные силы, скорость и резкость поворотов водителем руля. 2 с.п. ф-лы, 6 ил.
1
0
-«I
W2 V« i5 i6 t7
ICCL
РигЛ
Риъ.5
Фиг.6
| Авторское свидетельство СССР № 1327713, кл | |||
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
