Изобретение относится к электромашиностроению, а именно к шаговым электродвигателям, и может быть использовано в шаговом электроприводе различных производственных механизмов, а также в безредукторных электроприводах роботов и манипуляторов преимущественно для осуществления дискретного вращательного движения.
Известен электрический шаговый двигатель, содержащий полый ферромагнитный ротор и статор, состоящий из разделенных немагнитными участками ферромагнитных секций с обмотками. Полый ротор образован аксиально расположенными ферромагнитными зубцами, консольно закрепленными на торцовой поверхности диска. Статор состоит из U-образных магнитопроводов с обмотками и зубчатыми полюсами, примыкающими к наружной и внутренней поверхностям полого ротора [1].
Однако такой двигатель имеет малую величину удельного электромагнитного момента.
Наиболее близким по технической сущности к предлагаемому изобретению является шаговый электродвигатель, содержащий полый ротор, состоящий из чередующихся ферромагнитных зубьев и немагнитных участков, и статор, состоящий из разделенных немагнитными участками ферромагнитных секций с обмотками и полюсами, расположенных снаружи и внутри ротора, причем ширина зубьев ротора, расстояние между ними, ширина полюсов секции статора и расстояние между полюсами равны [2].
Недостатком такого двигателя является малая величина удельного электромагнитного момента.
Цель изобретения - повышение удельного электромагнитного момента двигателя.
Цель достигается тем, что в шаговом электродвигателе, содержащем полый ротор, состоящий из чередующихся ферромагнитных зубьев и немагнитных вставок, и статор, состоящий из разделенных немагнитными участками ферромагнитных секций с обмотками и полюсами, обращенными к ротору, между полюсами каждой ферромагнитной секции статора расположены ферромагнитные зубцы, чередующиеся вдоль окружности ротора с немагнитными вставками, число которых на единицу больше числа ферромагнитных зубцов, угловая протяженность ферромагнитных зубцов и немагнитных вставок статора равна соответственно угловой протяженности зубцов и немагнитных вставок ротора, причем угловые протяженности немагнитной вставки, ферромагнитного зубца и полюса секции статора, а также число магнитных зубцов секции статора и число зубцовых делений ротора связаны соотношениями:
α =  (β - γ)
(β - γ)
N = mM(n -  + 1+ K) где m - число фаз статора;
+ 1+ K) где m - число фаз статора;
n - число магнитных зубцов между полюсами одной секции статора;
М - число секций фазы статора;
N - число зубцовых делений ротора;
К = 0,1,2,... - целое число зубцовых делений между секциями фаз статора;
α - угловая протяженность полюса секции статора;
β - угловая протяженность ферромагнитного зубца;
γ - угловая протяженность немагнитной вставки.
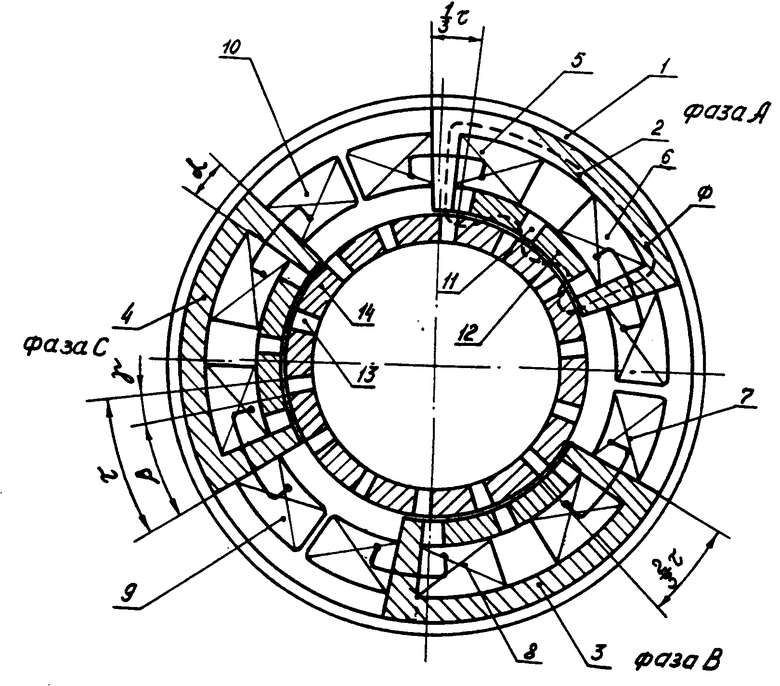
На чертеже представлена конструктивная схема трехфазного шагового электродвигателя, фазы которого имеют одну секцию, и схема замыкания магнитного потока.
Шаговый электродвигатель содержит немагнитный корпус 1, в котором расположены секции фаз A,B и С статора, включающие соответственно П-образные магнитопроводы 2-4 с обмотками возбуждения 5,6; 7,8 и 9,10. Между полюсами каждой секции расположены чередующиеся вдоль окружности ротора немагнитные вставки 11 и магнитные зубцы 12 статора.
Ротор состоит из чередующихся немагнитных вставок 13 и магнитных зубцов 14. Угловая протяженность γ немагнитных вставок и угловая протяженность β магнитных зубцов статора соответственно равны угловой протяженности немагнитных вставок и зубцов ротора. Угловая протяженность полюса секции статора составляет
α =  (β - γ)
(β - γ)
Магнитопровод секции фазы B имеет угловой сдвиг относительно фазы A на 1/3 зубцового деления, и магнитопровод фазы С имеет угловой сдвиг относительно фазы A на 2/3 зубцового деления τ. Двигатель может иметь m фаз, каждая из которых может состоять из М секций.
Двигатель работает следующим образом.
При подключении катушек 5,6 фазы A к источнику питания возникает магнитный поток Ф, который последовательно замыкается через рабочие воздушные зазоры между зубцами ротора 14 и зубцами 12 и полюсами статора. Под действием электромагнитного момента ротор займет положение, когда его зубцы 14 под фазой A будут соосны немагнитным вставкам 11 статора секции фазы A. При этом угловое перемещение ротора, т.е. шаг двигателя равен =
= 
При последовательной коммутации фаз осуществляется вращение ротора в направлении, определяемом очередностью включения фаз.
Предлагаемый двигатель характеризуется повышенным удельным электромагнитным моментом, так как наличие нескольких последовательно расположенных рабочих воздушных зазоров снижает начальную магнитную проводимость эквивалентного рабочего воздушного зазора и уменьшает насыщение стали. При этом снижется постоянная составляющая магнитного потока в магнитной системе, а переменная составляющая увеличивается.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2006 |
|
RU2321144C1 |
| ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2013 |
|
RU2544836C1 |
| ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2015 |
|
RU2596145C1 |
| Шаговый электродвигатель | 1987 |
|
SU1711301A1 |
| Шаговый электродвигатель | 1982 |
|
SU1141528A1 |
| СТАТОР ЭЛЕКТРИЧЕСКОЙ МАШИНЫ | 2004 |
|
RU2305889C2 |
| ЭЛЕКТРОМАГНИТНЫЙ УДАРНЫЙ ИНСТРУМЕНТ | 1995 |
|
RU2099175C1 |
| ЛИНЕЙНЫЙ ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2008 |
|
RU2366066C1 |
| СИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ С МАГНИТНОЙ РЕДУКЦИЕЙ | 2008 |
|
RU2375806C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С ЯВНОПОЛЮСНЫМ ЯКОРЕМ | 2010 |
|
RU2416860C1 |
Использование: в шаговом электроприводе различных производственных механизмов, а также в безредукторных электроприводах роботов и манипуляторах. Сущность изобретения: в шаговом электродвигателе, содержащем полый ротор, состоящий из чередующихся ферромагнитных зубьев и немагнитных вставок, и статор, состоящий из разделенных немагнитными участками ферромагнитных секций с обмотками и полюсами, обращенными к ротору, между полюсами каждой ферромагнитной секции статора расположены по окружности ферромагнитные зубцы, чередующиеся с немагнитными вставками, число которых на единицу больше числа ферромагнитных зубцов. Угловые протяженности зубцов статора и немагнитных вставок статора соответственно равны угловым протяженностям зубцов и немагнитных вставок ротора, причем угловые протяженности немагнитной вставки, ферромагнитного зубца и полюса секции статора, а также число магнитных зубцов секции статора и число зубцовых делений ротора связаны соотношениями, приведенными в описании. 1 ил.
ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ, содержащий полый ротор, состоящий из чередующихся ферромагнитных зубьев и немагнитных вставок, и статор, состоящий из разделенных немагнитными участками ферромагнитных секций с обмотками и полюсами, обращенными к ротору, отличающийся тем, что, с целью повышения удельного электромагнитного момента, между полюсами каждой ферромагнитной секции статора расположены по окружности ферромагнитные зубцы, чередующиеся с немагнитными вставками, число которых на единицу больше числа ферромагнитных зубцов, угловая протяженность ферромагнитных зубцов статора и немагнитных вставок статора равна соответственно угловой протяженности зубцов и немагнитных вставок ротора, причем угловые протяженности немагнитной вставки, ферромагнитного зубца и полюса секции статора, а также число магнитных зубцов секции статора и число зубцовых делений ротора связаны соотношениями

где m - число фаз статора;
n - число магнитных зубцов между полюсами одной секции;
M - число секций фазы статора;
N - число зубцовых делений ротора;
K = 0,1,2... - целое число зубцовых делений между секциями фаз статора;
α - угловая протяженность полюса секции статора;
b - угловая протяженность ферромагнитного зубца;
g - угловая протяженность немагнитной вставки.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Шаговый электродвигатель | 1982 |
|
SU1141528A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
