Изобретение относится к автоматическому управлению и регулированию и может быть использовано при усовершенствовании гидравлических исполнительных устройств, а также в качестве электрогидравлического привода для следящих систем.
Известно устройство для управления регулирующим органом, содержащее исполнительный механизм, полости которого
соединены через электромагнитный привод с насосом и сливом.
Недостатком указанного устройства является наличие в электромагнитном приводе подвижных управляющих элементов, что снижает его надежность.
Наиболее близким по технической сущности к предлагаемому изобретению является устройство для управления регулирующим органом, содержащее дроссельный регулятор, выполненный в виде соединенных по мостовой схеме четырех гидравлических каналов, к первой диагонали которого подсоединен насос, а вторая диагональ связана с полостями исполнительного механизма, формирователь управляющих сигналов, на каждом гидравлическом канале установлена электромагнитная катушка, выводы которой связаны с формирователем упра зляющих сигналов, а гидравлические каналы дроссельного регулятора, насос и полости исполнительного механизма заполнены ферромагнитной жидкостью.
Недостатком указанного устройства является его сложность, недостаточная надежность, обусловленная необходимостью наличия насоса, в котором имеются подвижные части. Также недостатком является невозможность жесткой фиксации исполнительного органа в различных положениях. Недостатком также является необ ходимость применения высокого давления в напорной магистрали, что.приводит к утечкам и авариям.
Целью изобретения является повышение надежности работы, упрощение конструкции, расширение функциональных возможностей, улучшение условий эксплуатации.
Цель достигается тем, что в электрогидроприводе, содержащем исполнительный механизм (гидродвигатель), полости и гидравлические каналы которого заполнены ферромагнитной жидкостью, устройство для изменения давления в полостях исполнительного механизма, формирователь управляющих сигналов, устройство для изменения давления в полостях исполнительного механизма выполнено в виде поплавка из немагнитного материала, помещенного концами в емкости с ферромагнитной жидкостью и выполненного с возможностью перемещения относительно обеих емкостей так, что поплавок с каждой емкостью образует плунжерную пару, каждая емкость помещена в электромагнитную обмотку, полости исполнительного механизма связаны через гидравлические каналы с источником гидравлической подпитки.
выполненным, например, в виде расширительного бака, емкости, каналы, поплавок и расширительный бак выполнены из немагнитного материала. Формирователь управляющих сигналов выполнен в виде вычислителя, связанного через цифроаналоговые преобразователи и сервоусилители с электромагнитными о,бмотками, в которые помещены емкости с ферромагнитной жидкостью, а также с электромагнитными обмотками, расположенными вокруг гидравлических каналов. На поплавке закреплен ограничительный упор (упоры) с упругой контактной поверхностью, а на емкостях концевые выключатели, так что между концами поплавка и дном емкостей сохраняется зазор в любом из крайних положений поплавка.
Выполнение устройства для изменения давления в полостях исполнительного механизма в виде поплавка, помещенного концами в емкости с ферромагнитной жид костью, помещенные в электромагнитные обмотки позволяет перемещать поплавок путем его вытеснения за счет увеличения псевдоплотности магнитной жидкости под действием магнитного поля. Принцип действия поплавка основан на эффекте магнитно-жидкостной левитации немагнитных тел, погруженных в феррожидкость. Этот принцип заключается в вытеснении немагнитного тела внутри ферромагнитной жидкости из зоны с большей концентрацией магнитных силовых линий в зону с меньшей концентрацией магНитных силовых линий.
Закрепление на поплавке ограничительных упоров (упора), а на емкостях концевых выключателей так, что между концами поплавка и дном емкости сохраняется зазор в любом из крайних положений поплавка, позволяет избежать мертвой точки положения поплавка, которая может возникнуть при прижатии конца поплавка к задней стенке емкости, что привело бы к разрыву магнитных силовых линий около стенки емкости. Наличие феррожидкости в зазоре между концом поплавка и задней стенкой позволяет вытеснять поплавок из емкости в крайних положениях, так как не происходит разрыва магнитных силовых линий, проходящих через феррожидкость, что произошло бы при плотном прилегании конца поплавка к задней стенке емкости.
Закрепление на гидрав)1ических каналах электромагнитных обмоток позволяет уменьшить затраты энергии при фиксации поплавка, но в принципе электрогидропривод может работать и без наличия электромагнитных катушек на гидравлических каналах.
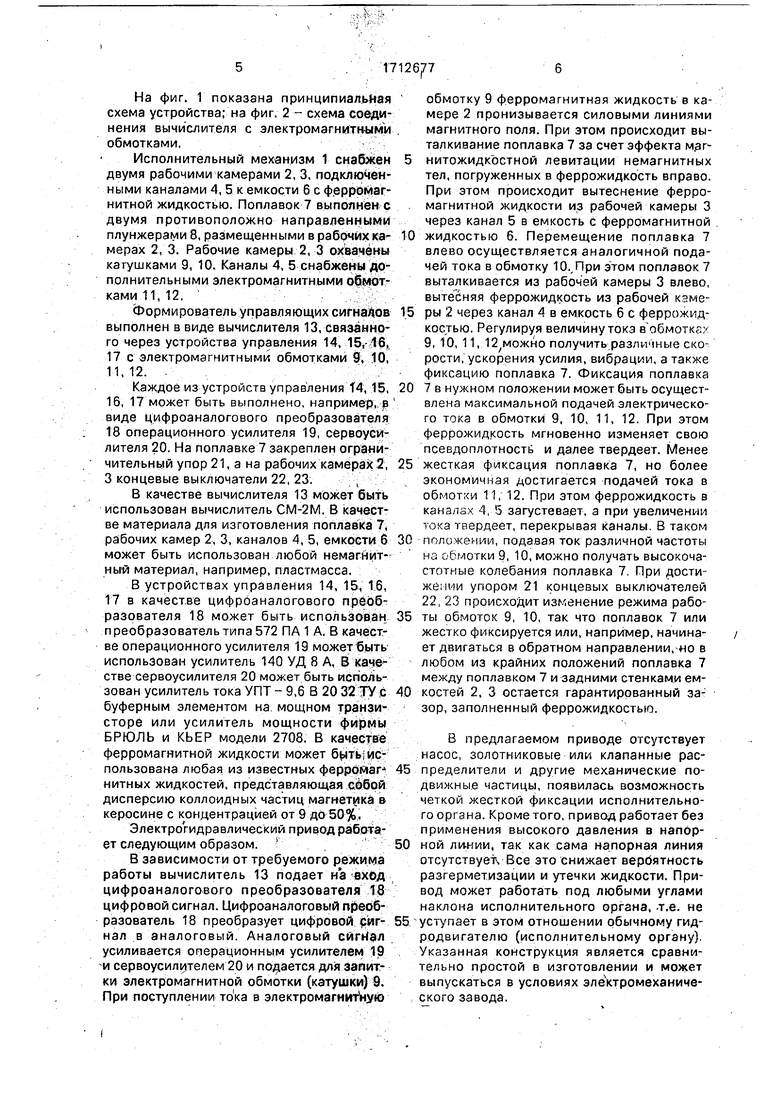
На фиг. 1 показана принципиальная схема устройства; на фиг. 2- схема соединения вычислителя с электромагнитными обмотками.
Исполнительный механизм 1 снабжен двумя рабочими камерами 2, 3, подключенными каналами 4,5 к емкости 6 с ферромагнитной жидкостью. Поплавок 7 выполнено двумя противоположно направленными плунжерами 8, размещенными в рабочих камерах 2, 3. Рабочие камеры 2, 3 охвачены катушками 9, 10. Каналы 4, 5 снабжены дополнительными электромагнитными обмотками 11, 12.
с1эормирователь управляющих сигналов выполнен в виде вычислителя 13, связанного через устройства управления 14, 15,-16,
17с электромагнитными обмотками 9, 10, 11, 12. .
Каждое из устройств управления Т4,15, 16, 17 может быть выполнено, например, р виде цифроаналогового преобразователя
18операционного усилителя 19, сервоусилителя 20. На поплавке 7 закреплен ограничительный упор 21, а на рабочих камерах 2, 3 концевые выключатели 22, 23.,
В качестве вычислителя 13 может быть использован вычислитель СМ-2М. В качестве материала для изготовления поплавка 7, рабочих камер 2, 3, каналов 4, 5, емкости б может быть использован любой немагнитный материал, например, пластмасса.
В устройствах управления 14, 15, 16, 17 в качестве цифроаналогового преобразователя 18 может быть использован преобразователь типа 572 ПА 1 А. В качестве операционного усилителя 19 можетбыть использован усилитель 140 УД В А, В качестве сервоусилителя 20 может быть использован усилитель тока УПТ - 9,6 В 20 32 ТУ с буферным элементом на. мощном транзисторе или усилитель мощности фирмы БРЮЛЬ и КЬЕР модели 2708. В качестве ферромагнитной жидкости может бить;использована любая из известных ферромагнитных жидкостей, представляющая собой дисперсию коллоидных частиц магнетика в керосине с кондентрацией от 9 до 50%.
Электрогидравлический привод работает следующим образом.
В зависимости от требуемого режима работы вычислитель 13 подает на вход цифроаналогового преобразователя 18 цифровой сигнал. Цифроаналоговый преобразователь 18 преобразует цифровой ригнал в аналоговый. Аналоговый сигнал усиливается операционным усилителем 19 и сервоусил1 телем 20 и подается для запитки электромагнитной обмотки (катушки) 9. При поступлении тока в электромагнитную
обмотку 9 ферромагнитная жидкость в камере 2 пронизывается силовыми линиями магнитного поля. При этом происходит выталкивание поплавка 7 за счет эффекта м гнитожидкостной левитации немагнитных тел, погруженных в феррожидкость вправо. При этом происходит вытеснение ферромагнитной жидкости из рабочей камеры 3 через канал 5 в емкость с ферромагнитной жидкостью б. Перемещение поплавка 7 влево осуществляется аналогичной подачей тока в обмотку 10.,При этом поплавок 7 выталкивается из рабочей камеры 3 влево, вытесняя феррожидкость из рабочей камеры 2 через канал 4 в емкость б с феррожидкос/ью. Регулируя величину тока вобмотках 9, 10, 11,12 можно получить pa3/ivt4Hbie скорости, ускорения усилия, вибрации, а также фиксацию поплавка 7. Фиксация поплавка 7 в нужном положении может быть осуществлена максимальной подачей электрического тока в обмотки 9, 10, 11, 12. При этом феррожидкость мгновенно изменяет свою псевдоплотностб и далее твердеет. Менее жесткая фиксация поплавка 7, но более экономичная достигается подачей тока в обмотки 11, 12. При этом феррожидкость в каналах 4, 5 загустевает, а при увеличении тока твердеет, перекрывая каналы, В таком положении, подавая ток различной частоты нз обмотки 9, 10, можно получать высокочастотные колебания поплавка 7. При достижении упором 21 концевых выключателей 22, 23 происходит изменение режима работы обмоток 9, ТО, так что поплавок 7 или жестко фиксируется или, например, начинает двигаться в обратном направлении,-но в любом из крайних положений поплавка 7 между поплавком 7 и задними стенками емкостей 2, 3 остается гарантированный зазор, заполненный феррожидкостью.
В предлагаемом приводе отсутствует насос, золотниковые или клапанные распределители и другие механические подвижные частицы, появилась возможность четкой жесткой фиксации исполнительного органа. Кроме того, привод работает без применения высокого давления в напорной ЛИ.НИИ, так как сама напорная линия отсутствует. Все это снижает вербятность разгерметизации и утечки жидкости. Привод может работать под любыми углами наклона исполнительного органа, т.е. не уступает в этом отношении обычному гидродвигателю (исполнительному органу). Указанная конструкция является сравнительно простой в изготовлении и может выпускаться в условиях элёктромеханического завода.
Формула изобретения 1, Электрогидравлический привод, содержащий исполнительный механизм с подвижным элементом в виде поплавка, ёмкость с ферромагнитной рабочей жидкостью и электромагнитную катушку для формиррвания магнитного поля управления давлением рабочей жидкости, подключенную к формирователю управляющих сигналов, отличающийся тем, что, с целью повышения надежности и расширения функциональных возможностей, исполнительный механизм снабжен двумя рабочими камерами, подключенными каждая каналом к емкости с ферромагнитной рабочей жид костью, поплавок выполнен с двумя противоположно направленными плунжерами.
размещенными в рабочих камерах, а катушка выполнена из двух обмоток, каждой из которых охвачена одна из рабочих камер,
2.Привод по п. 1, о т ли ч а ю щи и с я тем, что формирователь управляющих сигналов выполнен в виде последовательно включенных вычислителя и цифроаналоговых преобразователей, связанных с обмотками.
3.Привод по П.1, отл и ч а ю щи и Си тем, что каждая рабочая камера снабжена концевым выключателем, а поплавок - по меньшей мере одним упором, размещенным на расстоянии от конца плунжера, меньшем величины максимального хода последнего в рабочей камере.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор для сварочных работ | 1987 |
|
SU1505736A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ (ИЗМЕРЕНИЯ) ПЛОТНОСТИ ЖИДКОЙ СРЕДЫ И ПЛОТНОМЕР ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2004 |
|
RU2270435C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПЛОТНОСТИ ЖИДКИХ СРЕД | 2011 |
|
RU2493551C2 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ИЗМЕРЕНИЯ УРОВНЯ ЖИДКОСТИ В РЕЗЕРВУАРЕ | 1994 |
|
RU2084838C1 |
| Электрогидравлический усилитель | 1990 |
|
SU1710864A1 |
| Магнитоуправляемое поплавковое устройство | 1990 |
|
SU1767569A1 |
| Сигнализатор предельного уровня | 1980 |
|
SU934229A1 |
| Способ феррогидростатической сепарации | 1982 |
|
SU1105233A1 |
| Устройство выделения растворенных газов, преимущественно из морской воды | 2024 |
|
RU2838321C1 |
| Сигнализатор уровня жидкости | 1990 |
|
SU1809320A1 |

Изобретение относится к гидроавтома- тике и может быть использовано в конструкциях электрогидравлических систем управления. Целью изобретения является повышение надежности и расширение функциональных возможностей. Вычислитель 13 подает на вход цифроаналогового преобразователя 18 цифровой сигнал, который преобразует цифровой сигнал в анало'го- :вый, усиливающийся операционным усилите^ лем 19 и сервоусилителем 20, и прдается'в обмотку 9. При поступлении тока в электро- магнитную обмотку 9 ферромагнитная жидкость в камере 2 пронизывается силовыми линиями магнитного поля. При атом происходит выталкивание поплавка 1 за счет эф: фекта магнитожидкостной левитации немагнитных тел, погруженных в феррожцд-кость вправо и происходит вытеснение ферромагнитной жидкости из рабочей камеры 3 через канал 5 в емкость 6. Перемещение поплавка 7 влево осуществляется аналогичной подачей тока в обмотку 10 и он выталкивается из рабочей камеры 3 влево, вытесняя феррожидкость из рабочей камеры 2 через канал 4 в емкость 6. Фиксация поплавка 7 в нужном положении может быть осуществлена максимальной подачей электрического тока в обмотки 9, 10, 11, 12. При этом феррожидкость мгновенно изменяет свою псев- доплотность и далее твердеет. Менее жесткая фиксация поплавка 7, но более экономичная, достигается подачей тока в обмотки 11,. 12. При этом феррожидкость в каналах 4, 5 загустевает, а при увеличений тока твердеет, перекрывая каналы. В таком положении, подавая ток различной частоты на обмотки 9,10, можно получать высокочастотные колебания поплавка 1. При достижении упором 21 концевых выключателей 22, 23 происходит изменение режима работы обмоток 9, 10 так, что поплавок 7 или жестко фиксируется или начинает двигаться в обратном направлении, но в любом из крайних положений поплавка 7 между поплавком 7 и задними стенками емкостей 2,3остается гарантированный зазор, заполненный феррожидкостью. 2 з.п. ф-лы, 2 Ил.•«^ ^^ЁюОчVIVI
8
сриеЛ
12
/4
/5
II
Ю
/7
W
i
11
12
Фаг. 2
| Манипулятор для сварочных работ | 1975 |
|
SU527280A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Планшайба для точной расточки лекал и выработок | 1922 |
|
SU1976A1 |
