1
Изобретение относится к устройствам для сварки.
Известны сварочные манипуляторы, содержаи е поворотный стол и узел поворота стола, выполненный в виде поплавкового механизма, помещенного в емкость с жидкостью.
Однако на подъем стола из-за малой выталкивающей с-илы жидкости тратится много времени.
Цель изобретения - увеличение скорости подъема стола.
Эта цель достигается благодаря вводу в жидкость ферромагаитной взвеси и помещения емкости с жидкостью в злектромапштлу обмотку.
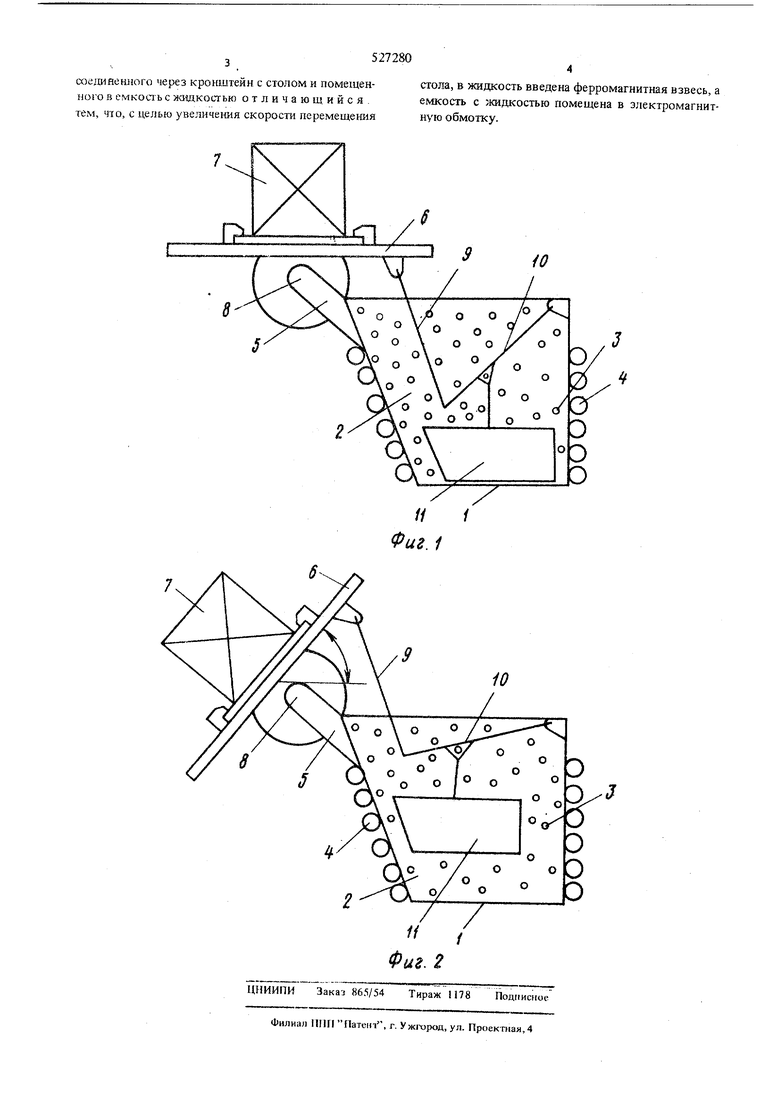
На фиг. 1 изображен манипулятор (поплавок погружен); на фиг. 2 - манипулятор (поплавок вснльшает).
Манипулятор представляет собой емкость 1, заполненную жидкостью 2 с ферромагнитной взвесью 3 и охваченную электромигниiной обмоткой 4. На кронштейне 5 укреплен поворотный столб, на котором размещают объект 7. Иов ороглый стоп 6 укреплен с возможностью поворота вокруг горизонтальной оси 8 и с помощью системы рьиагов 9 и 10 связан с поплавком 11.
Манипулятор работает следующим образом.
При отсутствии в электромагш1тной обмотке 4 электрического тока удельный вес воды ранег 1 г/см . Поплавок i 1, удельный вес которого выбра.ч в пределах 3-5 г/см, погружен. Поворотньш стол 6 с объектом 7 находится в горизонта.чьном ноложешш (см. фиг. 1).
При появлении в электромапштной обмотке 4 электрического тока в жидкости с ферромагнитной взвесью создается магнитное поле. Удельн1 ш вес жидкости повыщается до К) - 2 г/см, и поплавок 11 вспльшает. передавая свое движе1П1е с помощью рычагов 9 и 10 поворотному столу d, которык наклоняет вокруг горизонтальной оси 8 на угол а объект 7 (см. фиг. 1).
При выключении тока поплавок и IIODOJHITHI.IH стол БозвраП-1аются в первоначальное положение.
Форм у л а и 3 о б р е т с н и я
Ма дапулятор для снароч 1ых работ, содержащий
поворотный стол и . попорота CTOJUi. НЫНО.Чис 11ЫЙ в виде попл;шкового механизма, Н1а)нпрно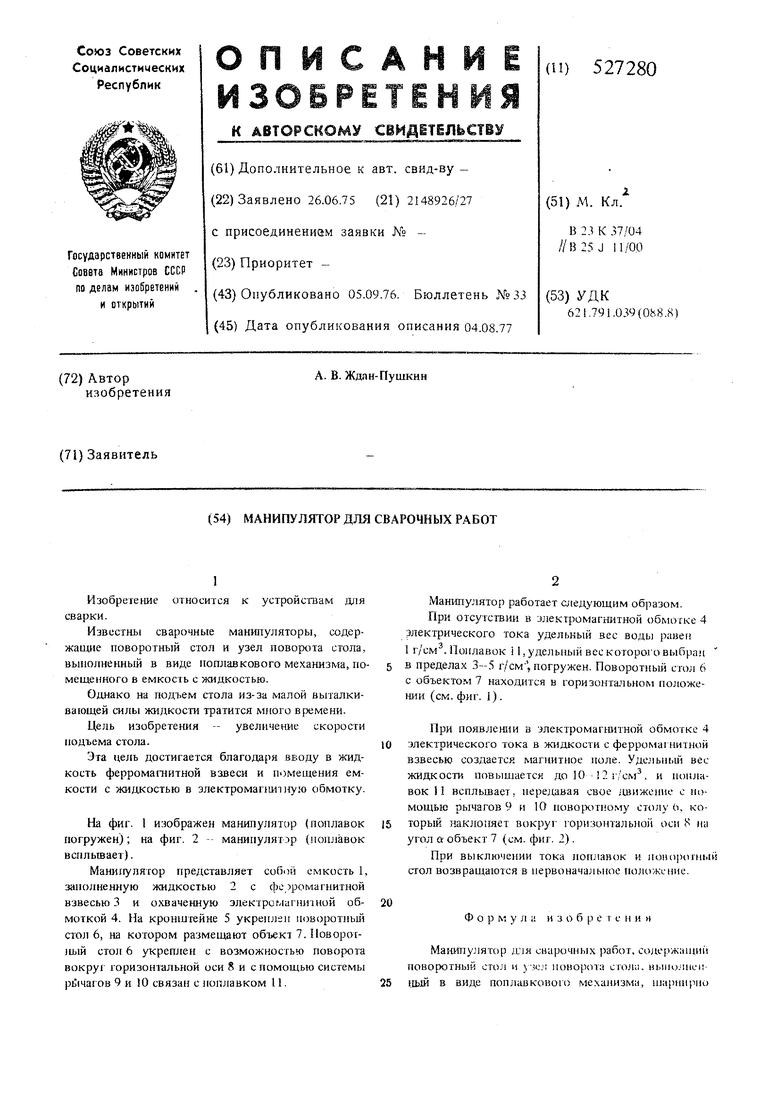
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор для сварочных работ | 1987 |
|
SU1505736A1 |
| Механизированная линия для ремонта электрооборудования | 1991 |
|
SU1801239A3 |
| ГЛУБОКОВОДНЫЙ ДОБЫЧНОЙ КОМПЛЕКС И ТЕЛЕУПРАВЛЯЕМЫЙ ПОДВОДНЫЙ РОБОТ | 2002 |
|
RU2214510C1 |
| МАНИПУЛЯТОР Л. И. РАБИНОВИЧА | 1972 |
|
SU340497A1 |
| КОМПЛЕКС АВТОНОМНОГО ЭЛЕКТРОТЕПЛОСНАБЖЕНИЯ ЗДАНИЯ | 2014 |
|
RU2569403C1 |
| АВТОНОМНЫЙ МОДУЛЬ ОБОРУДОВАНИЯ ДЛЯ СТРУЙНОЙ, ТЕРМИЧЕСКОЙ И ТЕРМОХИМИЧЕСКОЙ ОБРАБОТКИ ОБЪЕКТОВ | 1999 |
|
RU2166962C1 |
| Преобразователь уровня в электрический сигнал | 1977 |
|
SU765660A2 |
| Электрогидравлический привод | 1989 |
|
SU1712677A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ МАТРИЦЫ ДЛЯ ДИСКОВОГО НОСИТЕЛЯ ИНФОРМАЦИИ | 1993 |
|
RU2113020C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ МАНИПУЛЯТОР ДЛЯ ТУННЕЛЬНОГО МИКРОСКОПА | 1993 |
|
RU2061295C1 |
