Изобретение относится к электромагнитным устройствам для обработки различных веществ - гомогенного смешивания, тонкого измельчения и диспергирования, приготовления эмульсий, суспензий и т.п.
Цель изобретения - повышение надежности и эффективности работы за счет более полного использования объема активной зоны.
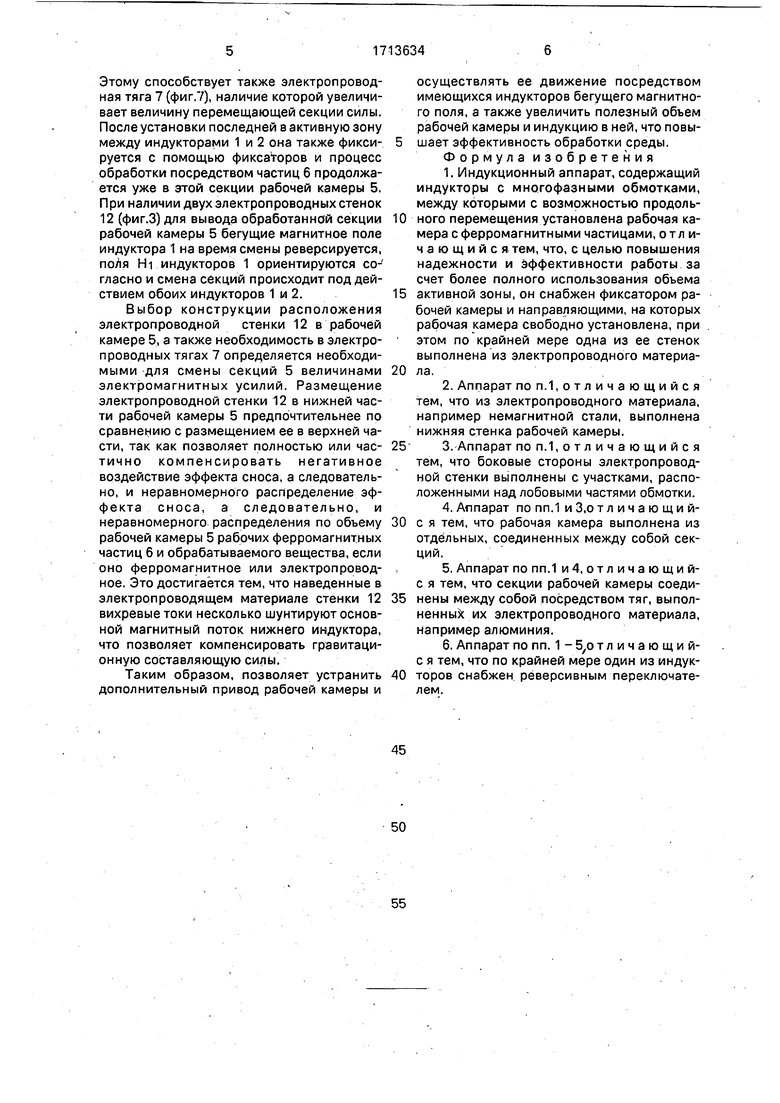
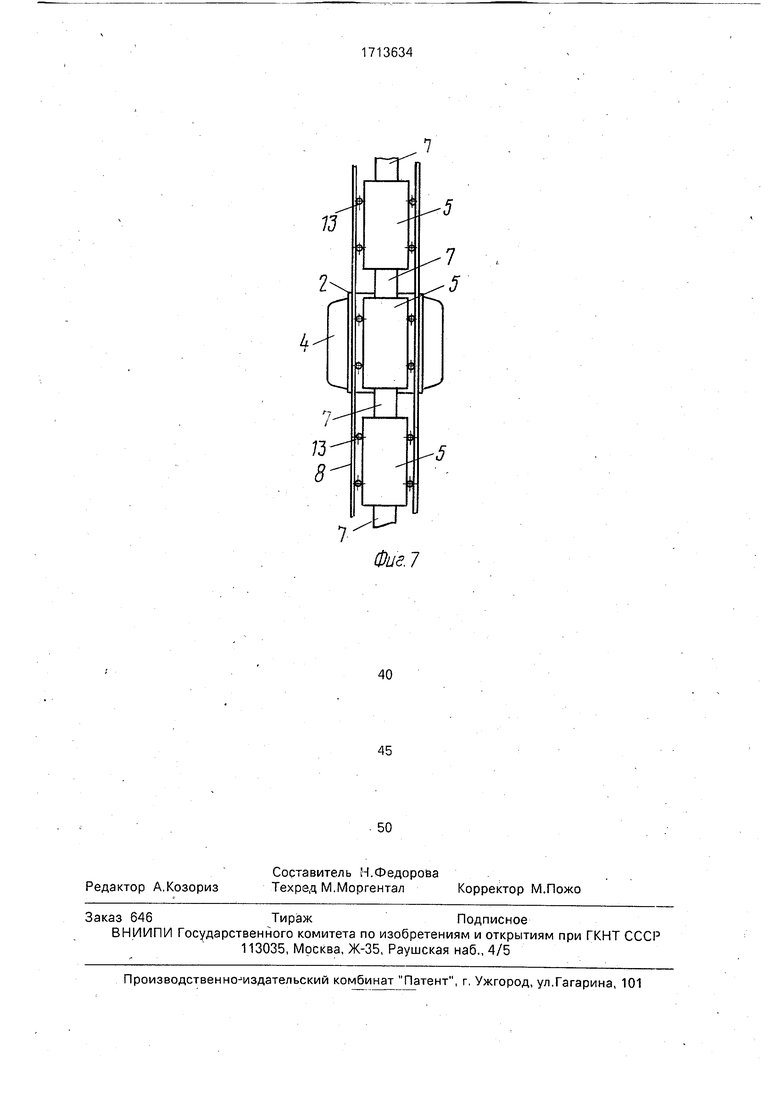
На фиг.1 схематично показана предлагаемая конструкция индукционного аппарата, вид сбоку: на фиг.2 - при выполнении электропроводной нижней стенки рабочей камеры, поперечный разрез; на фиг.З - то же, при выполнении электропроводными обеих стенок рабочей камеры; на фиг.4 - то же, при выполнении боковых сторон с напуском в зону лобовых частей обмотки; на фиг.5 - предлагаемый аппарат, вид сверху; на фиг.6 - то же, при выполнении направляющих в виде штанг; на фиг,7 - то же, при выполнении тяг элекропроводными (верхний индуктор условно не показан).
Индукционный аппарат содержит индукторы 1 и 2 с многофазными обмотками 3 и 4 соответственно. Между активными поверхностями индукторов 1 и 2 в активной зоне установлена рабочая камера 5 с некоторой совокупностью рабочих ферромагнитных частиц 6. Рабочая камера 5 выполнена секционированной из отдельных автономных секций, соединенных между собой тягами 7, Секции камеры 5 установлены свободно в активной зоне на направляющих 8 с возможностью продольного перемещения, причем установленная в активной зоне секция рабочей камеры 5 (где происходит процесс обработки) зафиксирована фиксаторами 9. Один из индукторов (индуктор 1) подключен к системе электропитания ABC через реверсивный переключатель 10, например реверсивный магнитный пускатель (фиг.1). Стенки 11 рабочей камеры 5 могут быть электроизолированными (фиг.2), электропроводной может быть как одна, например нижняя, стенка 12 (фиг.2), так и две стенки рабочей камеры 5 (фиг.З).
Кроме того, боковые стороны электропроводной стенки 12 могут быть выполнены с участками, расположенными над лобовыми частями обмотки (фиг.4 - обмотки 4), При этом электропроводными могут быть как стенка 12 с напусками (фиг.4), так и сами участки (не показаны). Направляющие 8 могут быть выполнены в виде рельс, по которым катятся ролики 13, так и в виде штанг 14, выполняющих одновременно роль тяг (фи.6), или иметь какое-либо другое известное в технике исполнение. Применениетого
или иного вида направляющих 8 зависит от вида технологической цепи - непрерывной, цепной (фиг.5 и 7) или дискретной (фиг.б). В последнем случае возможно применение
полых направляющих - тяг, через которые в полость рабочей камеры 5 может осуществляться ввод- вывод обрабатываемого вещества и частиц 6. Тяги 7 могут быть выполнены электропроводными,J напри0 мер, в виде алюминиевой пластины.
Применение предлагаемой конструкции аппарата позволяет свести до минимума нерабочий зазор 5 между полостью рабочей камеры 5 и активной поверхностью
5 индукторов 1 и 2 (фиг.2), что при прочих равных услових увеличит полезный объем камеры 5, причем увеличен|/1е объема камеры 5 происходит в местах, прилегающих к активной поверхности индукторов 1 и 2 где
0 индукция магнитного поля достигает максимальных значений, что важ-но для процесса обработки.
Аппарат работает следующим образом. При подаче электропитания ABC на обмотки 3 и 4 индукторов 1 и 2 в активной зоне создаются встречнонаправленные бегущие магнитные поля Hi и результирующее магнитное поле На под действием которых дискретные ферромагнитные частицы 6
0 приходят в интенсивное движение и производят обработку находящегося там вещества: смешивание измельчение и т.п. в зависимости от конкретного технологического процесса (фиг.1). Возможен процесс
5 обработки и без частиц 6,если обрабатываемое вещество ферромагнитное. Учитывая, что стенки 12 камеры 5 выполнены электропроводными из немагнитного металла с некоторой электропроводимостью, бегущие
0 магнитные поля Hi вызывают в них вихревые токи, взаимодействие которых с указанными полями приводит к возникновению силы, смещающей камеру в направлении поля HI. Такая же сила возникает и на боковых участках стенок 12, расположенных над лобовыми частями обмотки 4 (фиг.4), так как там также создается бегущее магнитное поле такого же направления, несколько ослабленное вследствие отсутствия магнито0 провода. От смещения при наличии одной электропроводной стенки 12 (фиг.2 и 4) рабочая камера 5 удерживается фиксатором 9. При наличии двух электропроводных стенок 12 (фиг.З) смещены силы взаимно компенсируются. После окончания процесса обработки фиксаторы 9 снимаются и под действием указанных смещающих сил секция рабочей камеры 5 (фиг.2 и 4) с обработанным веществом выходит из активной
зоны, а последующая втягивается в нее.
Этому способствует также электропроводная тяга 7 (фиг.7), наличие которой увеличивает величину перемещающей секции силы, После установки последней в активную зону между индукторами 1 и 2 она также фиксируется с помощью фиксаторов и процесс обработки посредством частиц 6 продолжается уже в этой секции рабочей камеры 5. При наличии двух электропроводных стенок 12 (фиг.З) для вывода обработанной секции рабочей камеры 5 бегущие магнитное поле индуктора 1 на время смены реверсируется, ПО/1Я HI индукторов 1 ориентируются согласно и смена секций происходит под действием обоих индукторов 1 и 2.
Выбор конструкции расположения электропроводной стенки 12 в рабочей камере 5, а также необходимость в электропроводных тягах 7 определяется необходимыми для смены секций 5 величинами электромагнитных усилий. Размещение электропроводной стенки 12 в нижней части рабочей камеры 5 предпочтительнее по сравнению с размещением ее в верхней части, так как позволяет полностью или частично компенсировать негативное воздействие эффекта сноса, а следовательно, и неравномерного распределение эффекта сноса, а следовательно, и неравномерного распределения по объему рабочей камеры 5 рабочих ферромагнитных частиц 6 и обрабатываемого вещества, если оно ферромагнитное или электропроводное, Это достигается тем, что наведенные в электропроводящем материале стенки 12 вихревые токи несколько шунтируют основной магнитный поток нижнего индуктора, что позволяет компенсировать гравитационную составляющую силы.
Таким образом, позволяет устранить дополнительный привод рабочей камеры и
осуществлять ее движение посредством имеющихся индукторов бегущего магнитного поля, а также увеличить полезный объем рабочей камеры и индукцию в ней, что повышает эффективность обработки среды, Ф о р м у л а и 3 о б р е т е н и я
1.Индукционный аппарат, содержащий индукторы с многофазными обмотками, между которыми с возможностью продольного перемещения установлена рабочая камера с ферромагнитными частицами, отличающийся тем, что, с целью повышения надежности и эффективности работы за счет более полного использования объема активной зоны, он снабжен фиксатором рабочей камеры и направляющими, на которых рабочая камера свободно установлена, при этом по крайней мере одна из ее стенок выполнена из электропроводного материала.
2.Аппарат по п.1,отличающийся тем, что из электропроводного материала, например немагнитной стали, выполнена нижняя стенка рабочей камеры,
3.Аппарат по п.1, отличающийся тем, что боковые стороны электропроводной стенки выполнены с участками, расположенными над лобовыми частями обмотки.
4.Аппарат по пп.1 и 3,о тличающийс я тем, что рабочая камера выполнена из отдельных, соединенных между собой секций,
5.Аппарат по пп,1 и4, отличающийс я тем, что секции рабочей камеры соединены между собой посредством тяг, выполнeнныk их электропроводного материала, например алюминия,
6.Аппарат по пп, 1 - т л и ч а ю щ и йс я тем, что по крайней мере один из индукторов снабжен, реверсивным переключателем.
1 Х1СУ|ЛУУУУ5гТОСУХХУУХХ
7 n
Фиг A
7 J
- V
V
,/
//N © i
QWWVplllii нЩ
Фиг,2
8 /3
5
фиг, 5
Фиг. 6
Фие.7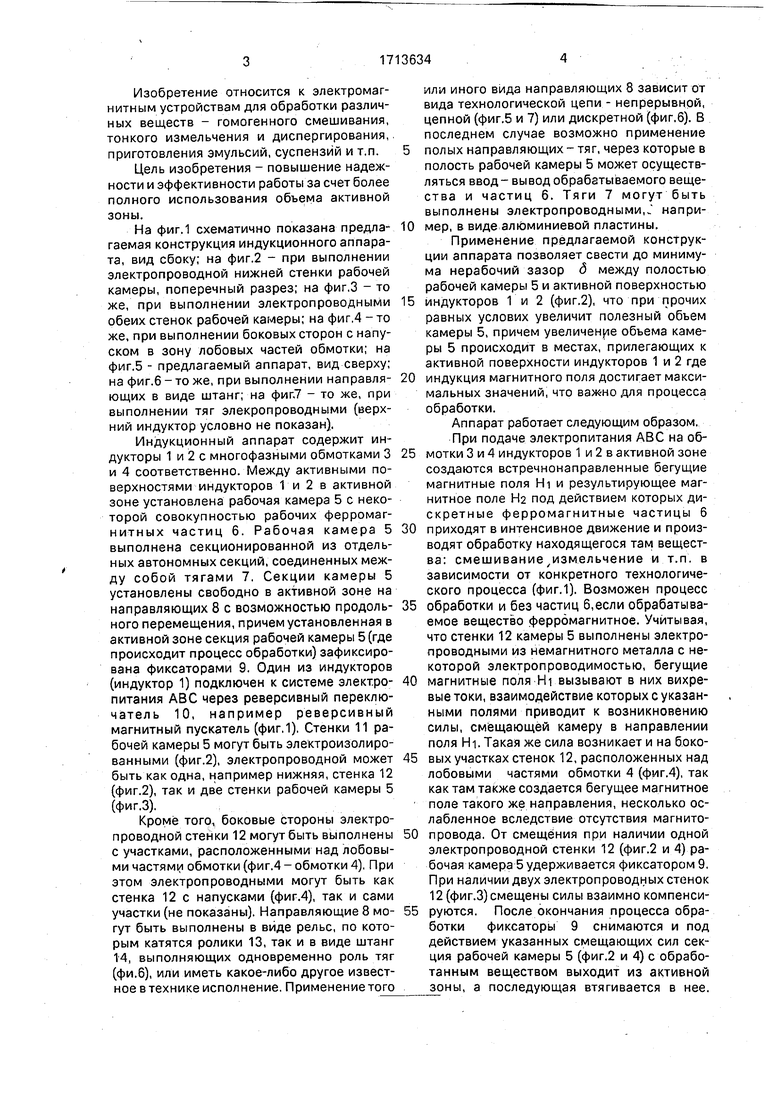
| название | год | авторы | номер документа |
|---|---|---|---|
| Индукционный аппарат | 1989 |
|
SU1713633A1 |
| Способ вывода материала из индукционного аппарата | 1989 |
|
SU1713635A1 |
| Индуктор линейной индукционной машины | 2018 |
|
RU2683596C1 |
| СПОСОБ ЭЛЕКТРОМАГНИТНОГО УПРАВЛЕНИЯ ВРАЩАТЕЛЬНЫМ ДВИЖЕНИЕМ ЭЛЕКТРОПРОВОДНОГО ТЕЛА | 1995 |
|
RU2104607C1 |
| Линейный индукционный аппарат для обработки материалов | 1983 |
|
SU1103897A1 |
| СПОСОБ ВОЗДЕЙСТВИЯ ЭЛЕКТРОМАГНИТНЫМ ПОЛЕМ НА РАСПЛАВ МЕТАЛЛА И ИНДУКТОР ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2018 |
|
RU2759178C2 |
| ЭЛЕКТРОДВИГАТЕЛЬ-КОМПРЕССОР | 2017 |
|
RU2658629C1 |
| ФЕРРОВИХРЕВОЙ АППАРАТ | 2006 |
|
RU2323040C1 |
| ФЕРРОВИХРЕВОЙ АППАРАТ | 2015 |
|
RU2607820C1 |
| Индукционный аппарат | 1984 |
|
SU1224918A1 |
Изобретение относится к электромагнитным устройствам для обработки различных веществ - гомогенного смешивания, тонкого измельчения и диспергирования,ABtприготовления эмульсий, суспензий и т.д. Целью изобретения является повышение надежности и повышение эффективности за счет более полного использования объема активной зоны. Индукционный аппарат содержит индукторы 1 и 2 с многофазными обмотками 3 и 4 , между которыми установлена рабочая камера 5 ферромагнитными частицами 6. В аппарате имеются фиксаторы 9 рабочей камеры 5, которая установлена на направляющих 8 с возможностью продольного перемещения. При этом по крайней мере одна из стенок камеры 5 выполнена из электропроводного немагнитного материала, например немагнитной стали,, титанового сплава и т.п. 5 з.п. ф-лы, 7 ил.>&-ЮслсФ«?. 7СА) ON CJ 4^7J'8
| Способ крашения тканей | 1922 |
|
SU62A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Кузнечная нефтяная печь с форсункой | 1917 |
|
SU1987A1 |
