Изобретение относится к измерительной технике и может быть использовано, в частности, в аналоговых счетно-решающих приборах и устройствах при измерении угловых перемещений от 0 до 360°.
Известен способ преобразования угловых перемещений многополюсного датчика, заключающийся в том, что возбуждают первичную обмотку датчика, перемещают его подвижную часть с фиксированной дис- кретностью в пределах 360 эл.град., сравнивают значения ЭДС на вторичной обмотке с расчетными значениями, определяя величину погрешности, запоминают значения ЭДС и соответствующие значения погрешности, после чего произвольно перемещают подвижную часть датчика, измеряют значение ЭДС на вторичной обмотке и корректируют полученное значение в соответствии с запомненной погрешностью.
Недостатком данного способа является необходимость перемещения подвижной части датчика в процессе проведения операций определения погрешности датчика, что в ряде случаев недопустимо. Кроме того, погрешность от эксцентриситета и биения в этом способе не устраняется.
Наиболее близким к предлагаемому является способ преобразования угловых перемещений многополюсного датчика с двумя квадратурными первичными обмотками и не менее чем с одной вторичной, заключающийся в том, что формируют первое и второе напряжения возбуждения и используют их для синфазного возбужде- ния обеих квадратурных первичных обмоток, перемещают подвижную часть датчика и в каком-либо ее фиксированном положении измеряют ЭДС на вторичной обмотке датчика, запоминают измеренное значение, затем переключают квадратурные обмотки, изменив порядковый номер подключаемого напряжения возбуждения, повторно измеряют величину ЭДС и по величине полусуммы измеренных значений ЭДС определяют угловое положение подвижной части.
В известном способе уменьшено значение внутрипериодной погрешности, обусловленное неточностью изготовления проводников обмоток датчика, благодаря чему обеспечивается уменьшение высших гармонических составляющих погрешности. Однако погрешность, обусловленная изменением взаимного расположения обмоток подвижной и неподвижной частей датчика при перемещении подвижной части датчика (эксцентриситет) и изменением расстояния между обращенными друг к другу поверхностями в различных точках окружности (биение), имеет значительную величину. Кроме того, скорость измерения величины ЭДС ограничивается временем затухания переходного процесса при переключениях обмоток датчика.
Целью изобретения является повышение точности за счет уменьшения влияния эксцентриситета и биения и повышение быстродействия измерений.
Поставленная цель достигается тем, что в способе преобразования угловых перемещений многополюсного датчика с двумя квадратурными первичными обмотками и не менее чем с одной вторичной, заключающемся в том, что формируют первое и второе напряжения возбуждения и используют их для синфазного возбуждения обеих квадратурных первичных обмоток, перемещают подвижную часть датчика и в каком-либо ее фиксированном положении измеряют ЭДС на вторичной обмотке датчика, запоминают измеренное значение, затем переключают квадратурные обмотки, изменив порядковый номер подключаемого напряжения возбуждения, повторно измеряют величину ЭДС и подсчитывают полусумму измеренных значений ЭДС, по величине которой определяют угловое положение подвижной части, предварительно разделяют первичные обмотки датчика на кратное четырем количество гальванически развязанных секций, имеющих одинаковое количество витков, поочередно возбуждают противофазно подключенными напряжениями возбуждения пары противолежащих секций каждой из этих обмоток и изменяют ток в одной из секций возбужденной пары в направлении
получения нулевого значения ЭДС на вторичной обмотке датчика, запоминают соотношения между токами в секциях каждой пары и при осуществлении синфазного возбуждения обеих квадратурных первичных обмоток датчика обеспечивают возбуждение противолежащих пар секций этих обмоток с учетом запомненных соотношений между токами соответствующих пар. Кроме того, переключение квадратурных обмоток осуществляют в момент равенства нулю мгновенных значений токов возбуждения.
На чертеже представлена электрическая схема многополюсного датчика угловых перемещений, с помощью которого осуществляют предлагаемый способ.
Датчик состоит из подвижной и неподвижной частей, на одной из которых размещены две первичные квадратурные обмотки 1 и 2. Каждая из обмоток 1 и 2 разделена на четное количество, кратное четырем, гальванически развязанных секций: секции 3 - 6 обмотки 1 и секции 7-10 обмотки 2. На другой части датчика расположена вторичная обмотка 11, проводники которой равно- мерно распределены по окружности, Обмотки подвижной и неподвижной частей в общем случае могут быть расположены с эксцентриситетом е и торцовым биением h.
Способ осуществляют следующим об- разом.
Формируют первое и второе напряжения возбуждения, которые используют для возбуждения обеих первичных обмоток 1 и 2. Эти обмотки предварительно разделяют, например, на четыре гальванически развязанные секции: 3 - 6 - для обмотки 1 и 7 - 10 - для обмотки 2. При этом количество витков в секциях каждой из первичных обмоток одинаково. Далее при каком-либо фиксированном положении подвижной части датчика поочередно возбуждают проти- вофазно подключенными напряжениями возбуждения пары противолежащих секций каждой из обмоток, например 3 и 5, затем 4 и 6, 7 и 9, 8 и 10 соответственно. В результате этого в одной из возбуждаемых секций, например в секции 3, протекает ток lm3Sin(a)i, а в другой секции 5-lm5-f xsin ( со t - Л ). При этом в одной части вторич- ной обмотки 11 датчика, индуктивно связанной с соответствующей секцией обмотки 1, индуцируется ЭДС, равная Em3cos(), а в другой, диаметрально расположенной, индуцируется ЭДС, равная -Em5cos(). Сум- марное значение ЕВых ЭДС вторичной обмотки равно: ЕВых Етз + Ems. Это значение ЭДС отлично от нуля в случае смещения осей или плоскостей первичных и вторич
ных обмоток датчика, или того и другого одновременно, т.е. в случае наличия эксцентриситета Ј и биения h. Чтобы устранить погрешность, обусловленную эксцентриситетом и биением, в одной из секций, например в секции 3 или 5, возбужденной пары изменяют ток в направлении получения нулевого значения ЭДС ЕВЫХ на вторичной обмотке 11 датчика и определяют соотношения токов Im3/lm5 Ki в этих секциях. Указанные изменения проводят поочередно со всеми парами секций, в результате чего запоминают соответствующие
Соотношения ТОКОВ: Im4/lm6 К2,- 1т7/1т9 Кз; Im8/lm10 K4.
Далее осуществляют синфазное возбуждение обеих квадратурных первичных обмоток 1 и 2, обеспечивая возбуждение противолежащих пар секций этих обмоток с учетом запомненных соотношений Ki, K2, Кз и К.4. В том же фиксированном положении подвижной части датчика измеряют значение ЭДС на вторичной обмотке, которое уже в меньшей степени подвержено влиянию эксцентриситета и биения благодаря коррекции токов возбуждения. Однако в случае неточности изготовления проводников обмоток датчика и погрешности выполнения источников двухфазного напряжения возбуждения датчика измеренные ЭДС вторичной обмотки будут функционально связаны не только с фиксированным угловым положением подвижной части датчика, но и с погрешностью Д.Согласно предлагаемому способу запоминают измеренное значение Евых1 и переключают квадратурные обмотки 1 и 2, изменив порядковый номер подключаемого напряжения возбуждения. Далее измеряют значение ЕВых2 на вторичной обмотке датчика и подсчитывают полусумму, измеренных значений, по величине которой определяют угловое положение подвижной части. Таким образом, за счет указанных операций выходное значение ЭДС более точно характеризует положение подвижной части многополюсного датчика угловых перемещений.
Для повышения быстродействия предлагаемого способа указанные переключения квадратурных обмоток 1 и 2 можно выполнять в момент равенства нулю мгновенных значений токов воздуждения Im3,..., Imio, что позволяет устранить переходные процессы, которые могли бы возникнуть при произвольном выборе времени их переключения. Следовательно, благодаря переключениям обмоток в момент равенства нулю протекающих в них токов возбуждения, измерение ЭДС производят сразу же
после выполнения операции их переключения при осуществлении синфазного возбуждения, что повышает быстродействие данного способа измерения.
Наличие эксцентриситета и биения в конструкциях прецизионных датчиков не позволяет с помощью известных способов измерить угловое положение с погрешностью менее единиц угловых секунд, в то время как с помощью предлагаемого способа возможно снизить погрешность измерения выходной информации до уровня десятых долей угловых секунд.
Формула изобретения 1. Способ преобразования угловых перемещений многополюсного датчика с двумя квадратурными первичными обмотками и не менее чем с одной вторичной, заключающийся в том, что формируют первое и второе напряжения возбуждения и используют их для синфазного возбуждения обеих квадратурных первичных обмоток, перемещают подвижную часть датчика и в каком-либо ее фиксированном положении измеряют ЭДС на вторичной обмотке датчика, запоминают измеренное значение, затем переключают квадратурные обмотки, изменив порядковый номер подключаемого напряжения возбуждения, повторно измеряют величину
ЭДС и по величине полусуммы измеренных значений ЭДС определяют угловое положение подвижной части, отличающийся тем, что, с целью повышения точности за
счет уменьшения влияния эксцентриситета и биения, предварительно разделяют первичные обмотки датчика на кратное четырем количество гальванически развязанных секций, имеющих одинаковое количество
витков, поочередно возбуждают противо- фазно подключенными напряжениями возбуждения пары противолежащих секций каждой из этих обмоток и изменяют ток в одной из секций возбужденной пары в направлении получения нулевого значения ЭДС на вторичной обмотке датчика, запоминают соотношения между токами в секциях каждой пары и при осуществлении синфазного возбуждения обеих квадратурных первичных обмоток датчика обеспечивают возбуждение противолежащих пар секций этих обмоток с учетом запомненных соотношений междут токами соответствующих пар.
2. Способ по п. 1,отличающийся тем, что, с целью повышения быстродействия, переключение квадратурных обмоток осуществляют в момент равенства нулю мгновенных значений токов возбуждения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Индукционный датчик угловых перемещений | 1990 |
|
SU1744442A1 |
| Способ контроля погрешности синусно-косинусного преобразователя перемещений в фазу выходного сигнала | 1990 |
|
SU1744441A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТИ ВРАЩАЮЩЕГОСЯ ТРАНСФОРМАТОРА | 1992 |
|
RU2046514C1 |
| Бесконтактный индуктосин | 1977 |
|
SU658672A1 |
| Датчик угловых перемещений | 1980 |
|
SU879287A1 |
| Способ преобразования угловых перемещений в фазу выходного сигнала и устройство для его осуществления | 1989 |
|
SU1651090A1 |
| Индукционный датчик угла | 1974 |
|
SU521636A1 |
| Многополюсный вращающийся трансформатор | 1981 |
|
SU961056A1 |
| Синусно-косинусный датчик угла | 1978 |
|
SU765945A1 |
| Способ настройки двухканальных систем передачи угла | 1974 |
|
SU610147A1 |
Изобретение относится к измерительной технике и повышает точность и быстродействие способа преобразования угловых перемещений, осуществляемого с помощью многополюсного датчика, например синус-косинусного вращающегося трансформатора, за счет уменьшения влияния эксцентриситета и биения его подвижной части. Способ заключается в том, что формируют первое и второе напряжения возбуждения и используют оба напряжения для противофазного возбуждения противолежащих пар секций Зи5,4и6,7и9.8и10 каждой из обмоток 1 и 2 возбуждения, которые должны быть предварительно разделены на четное, кратное четырем, количество секций. Далее поочередно изменяют ток возбуждения в каждой паре противолежащих секций, добиваясь нулевого значения ЭДС на вторичной обмотке 11, запоминают полученные соотношения протекающих в них токов, после чего обеспечивают синфазное возбуждение пар секций с учетом заЁ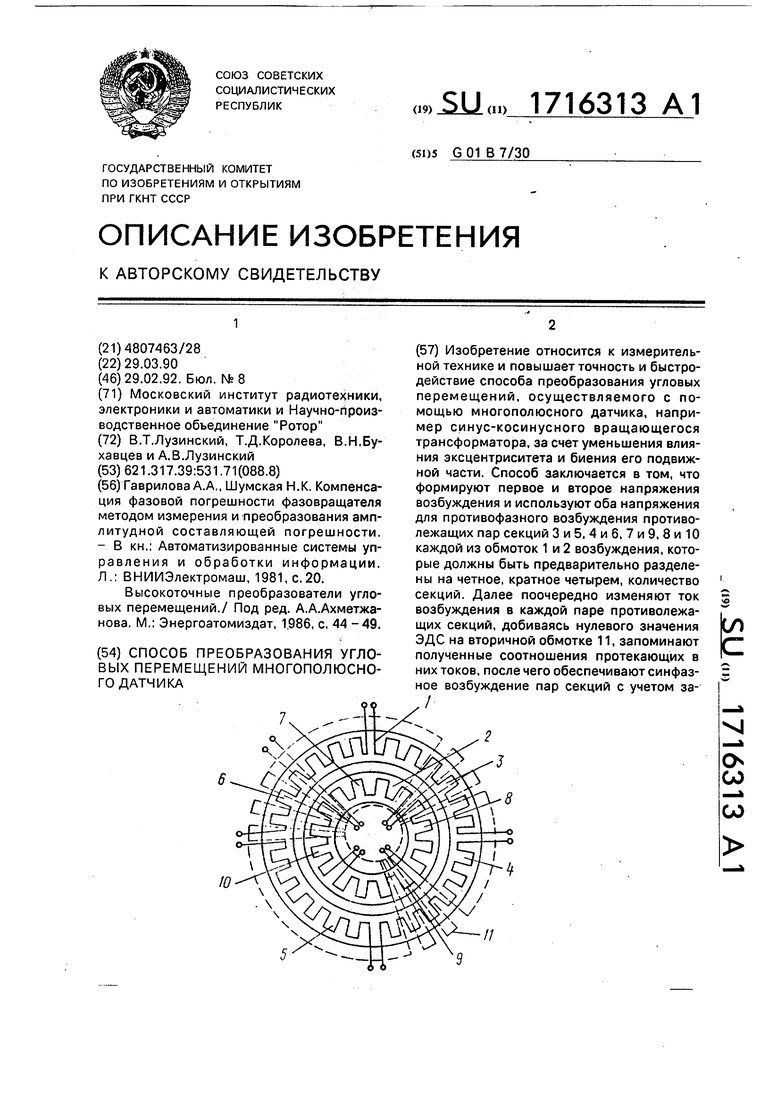
| Гаврилова А.А., Шуйская Н.К | |||
| Компенсация фазовой погрешности фазовращателя методом измерения и преобразования амплитудной составляющей погрешности | |||
| - В кн.: Автоматизированные системы управления и обработки информации | |||
| Л.: ВНИИЭлектромаш, 1981, с.20 | |||
| Высокоточные преобразователи угловых перемещений./ Под ред | |||
| А.А.Ахметжа- нова | |||
| М.: Энергоатомиздат, 1.986, с | |||
| Приспособление для плетения проволочного каркаса для железобетонных пустотелых камней | 1920 |
|
SU44A1 |
