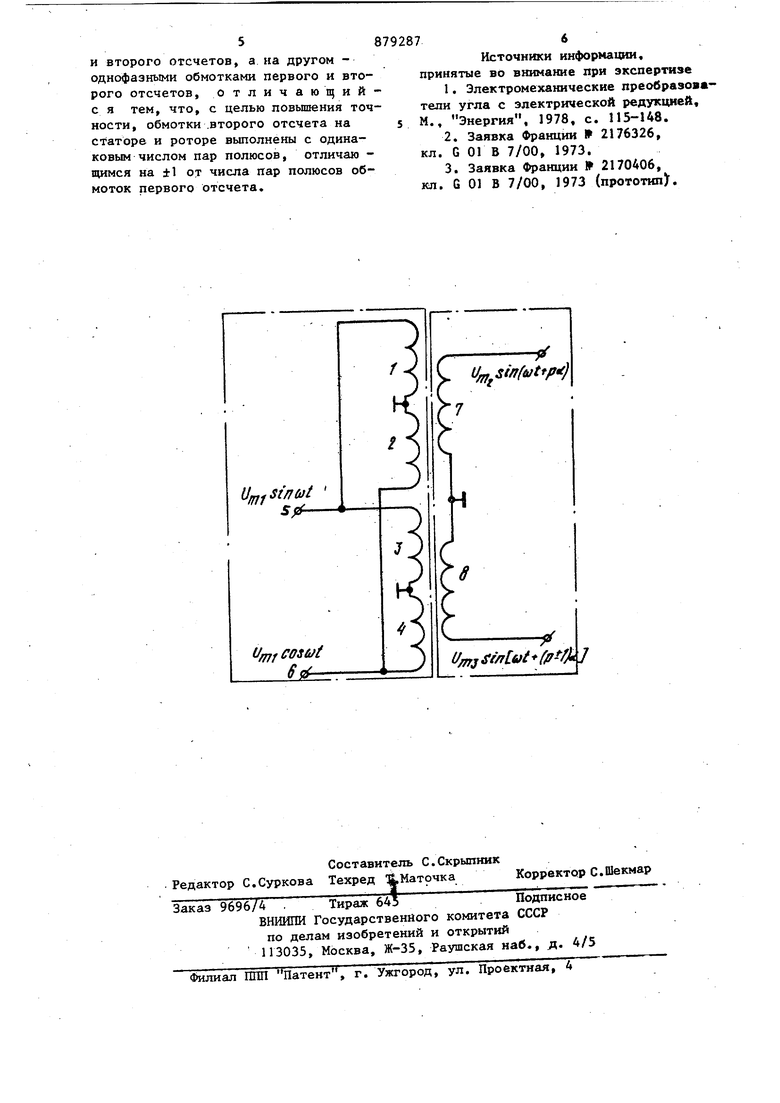
Изобретение относится к контроль ногизмерительной технике и автоматике и может быть использовано, в част ности, для измерения угловых перемещений. Известны датчики индукционного ти па для измерения угла, содержащие многополюсные первичные и вторичные обмотки, поворотные трансформаторы, индуктосины l. Высокая точность таких датчиков достигается за счет большого передаточного отношения эле трической редукции. Недостатком этих датчиков являетс неоднозначность измерения перемещений в диапазоне 360°, так как период изменения выходного сигнала датчика составляет , где р - число пар полюсов выходной обмотки, Иа.вестны также многоотсчетные дат чики угловых перемещений, позволяющие .однозначно определять угловое перемещение в пределах 36сРС23. Количество отсчетов в таких датчиках определяется величиной злектрической редукции канала точного отсчета и точностью, которая может быть реализована в каналах грубого и точного отсчетов. При двухотсчетной системе величина электрической редукции канала точного отсчета ограничивается величиной погрешности канала грубого отсчета. Для высокоточных систем (порядка единиц угловых секунд) двухотсчетная система трудно реализуется из-за высоких требований к точности канала грубого отсчета. При этом применяют трехотсчетные системы с каналами точного, промежуточного и грубого отсчетов. Недостатком многоотсчетных систем являются трудно устранимые составлякшще погрешности, обусловленные взаимным влиянием различных каналов. Наиболее близким к данному изобретению по технической сущности и 3 достигаемому эффекту является датчик угловых перемещений, содержащий относительно подвижные статор и ротор с размещенными на одном из них двухфазными обмотками первого и второго отсчетов, а на другом - однофазными обмотками первого и второго отсчетов З . Датчик выполнен двухотсчет ным. Обмотки первого отсчета выполнены с р-числом пар полюсов, а обмотки вт рого отсчета выполнены с чцслом-пар полюсов в несколько раз меньшим, чем число пар полюсов обмоток первого отсчета, но в несколько раз превышающим единицу. Недостатками этого датчика являют ся неоднозначность съема информации так как период изменения наведенной ЭДС в обмотке второго отсчета в несколько раз больше периода изменения наведенной ЭДС в обмотке первого отсчета но в несколько раз меньше ЗбО. Для получения однозначного съема информации в этом датчике необ ходимо дополнительно использовать об мотки грубого отсчета с числом пар полюсов, равным 1, что усложняет его конструкцию. Кроме того, точность измерения во втором отсчете значительно ниже по сравнению с точностью измерения в первом отсчете, так как количество проводников обмотки второго отсчета в несколько раз меньше В связи с этим величина электрической редукции в первом отсчете, обусловленная погрешностью во втором отсчете, ограничена. Цель изобретения - повышение точности измерения. Указанная цель достигается тем, что обмотки второго отсчета на стат ре и роторе выполнены с одинаковым числом лар полюсов, отличающимся н ,± от числа пар полюсов обмоток пер вого отсчета. На чертеже представлена электрическая схема датчика угловых перемещений . Датчик содержит статор и ротор (на чертеже не показаны), на одном из которых размещены двухфазные обмотки;J и 2 первого отсчета и двухфазные обмотки 3 и 4 второго отсчета, подключенные к зажимам 5 и 6, предназначенным для подвода двухфазного напряжения питания пол и Um jCOSUJt. Однофазная обмотка 7 первого отсчета, индуктивно связанная с двухфазными обмотками 1 и 2 первого отсчета, имеет, как и эти обмотки, число пар полюсов, равное р. Однофазная обмотка 8 второго отсчета, индуктивно связанная с двухфазными обмотками. 3 и 4 второго отсчета, имеет, как и эти обмотки, число пар полюсов р+1, т.е. отличающееся на 1 от числа лар полюсов обмоток первого отсчета. Датчик-угловьос леремещений работает следукацим образом. При подаче двухфазного напряжения питания ит 51паД: и Um coscw: на зажимы 5 и 6 датчика и перемещении на угол oi. статора относительно ротора в однофазной обмотке 7 первого отсчета наводится ЭДС in (Ut+poi) , а в однофазной обмотке 8 второго отсчета ЭДС .(p+l)ci , где р - число пар полюсов обмоток первого отсчета. Разность фаз между напряжением питания Um slnUt и выходной ЭДС Um2sln(w:+ 4-pci) обмотки 7 первого отсчета равна Ft., т.е. информация однозначна в пределах . Разность фаз между ЭДС, наводимыми в обмотках первого и второго отсчетов Um-sin((t;t-fpoO и Umjsin U t+ + (p+l)of J , равна cL , т.е. информация однозначна в пределах 360°. Датчик позволяет получить информацию точного poLJi грубого oL отсчетов с практически одинаковыми погрешностями, так как разница между числом пар-ПОЛЮСОВ обмоток обоих отсчетов составляет 1. Благодаря этому повьш1аются точность и разрешающая способность датчика. Применение двухотсчетной системы, включающей в себя обмотки двух отсчетов с числами пар полюсов р и р+1, дает возможность получить в пределах одного оборота ротора однозначную информацию об его угле поворота. Причем однозначность этой информации не зависит от выбранного числа пар полюсов р, вследствие чего снимаются ограничения, накладьшаемые «а величину электрической редукции первого отсчета погрешностями второго отсчета. Формула изобретения Датчик угловых перемещений, содержащий относительно подвижные статор и ротор с размещенными на одном из них двухфазными обмотками первого
и второго отсчетов, а на другом однофазными обмотками первого и второго отсчетов, отличающий с я тем, что, с целью повышения точ ности, обмотки .второго отсчета на статоре и роторе вьтолнены с одинаковым числом пар полюсов, отличаю щимся на ±1 от числа пар полюсов обмоток первого отсчета.
792876
Источники информации, принятые во внимание при экспертизе
1.Электромеханические преобразова тели угла с электрической редукцией,
5 М., Энергия, 1978, с. 115-148.
2.Заявка Франции 9 2176326, G 01 В 7/00, 1973.
кл,
3. Заявка Франции 2170406, кл. G 01 В 7/00, 1973 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухотсчетный индукционный датчик угла | 1988 |
|
SU1497689A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТИ ВРАЩАЮЩЕГОСЯ ТРАНСФОРМАТОРА | 1992 |
|
RU2046514C1 |
| Двухканальный индукционный редуктосин | 1984 |
|
SU1411889A1 |
| Преобразователь перемещений | 1980 |
|
SU868327A1 |
| Двухотсчетный вращающийся трансформатор | 1982 |
|
SU1034130A1 |
| Двухотсчетный бесконтактный индукционный датчик угла | 1987 |
|
SU1566448A1 |
| Двухотсчетный вращающийся трансформатор | 1989 |
|
SU1658305A1 |
| Двухотсчетный вращающийся трансформатор | 1988 |
|
SU1594657A1 |
| Двухотсчетный вращающийся трансформатор | 1984 |
|
SU1234927A1 |
| Двухотсчетный вращающийся трансформатор | 1989 |
|
SU1702492A1 |
-
U sinfut p e)
(Jmj f Lut-fff f)
