(54) БЕСКОНТАКТНЫЙ ИНДУКТОСИ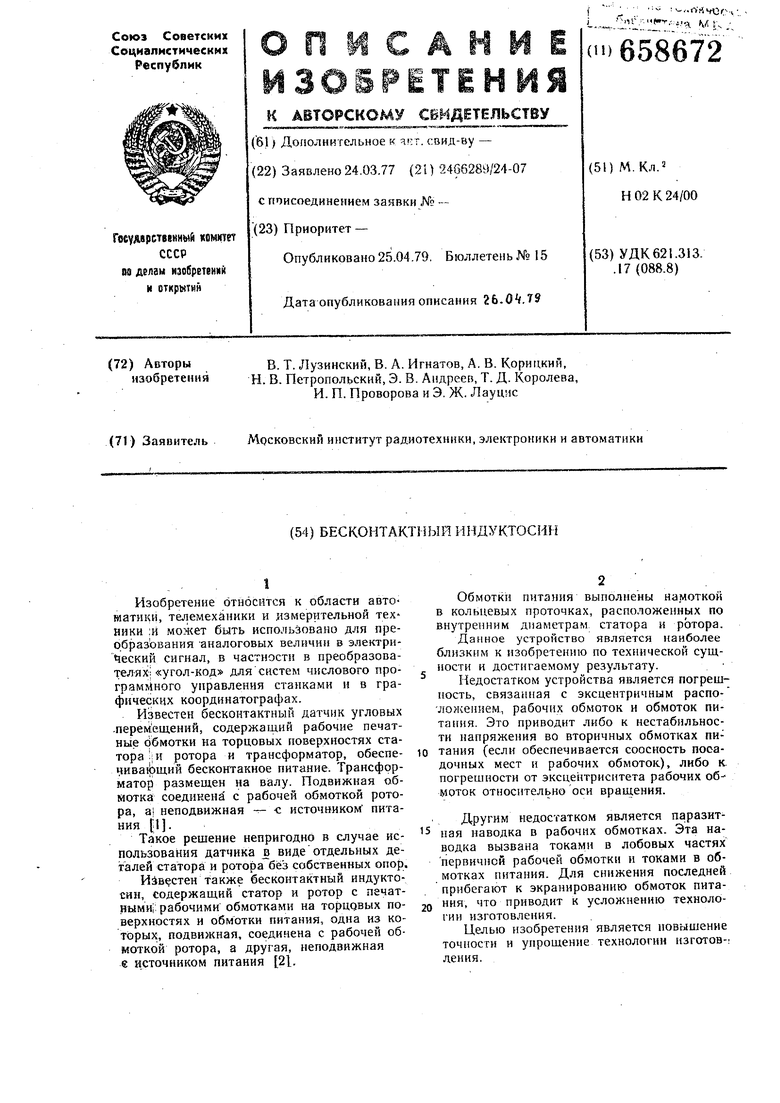
| название | год | авторы | номер документа |
|---|---|---|---|
| Индуктосин | 1983 |
|
SU1136266A1 |
| Индуктосин | 1976 |
|
SU752647A1 |
| Индуктосин-фазовращатель | 1981 |
|
SU980222A1 |
| Датчик положения - многоотсчетныйиНдуКТОКОР | 1977 |
|
SU817892A1 |
| Датчик перемещений - индуктокор | 1976 |
|
SU817739A1 |
| Индуктосин | 1981 |
|
SU963126A1 |
| Датчик перемещений | 1978 |
|
SU817893A1 |
| ДАТЧИК УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 1998 |
|
RU2148788C1 |
| Способ контроля качества печатной обмотки индуктосина | 1983 |
|
SU1138766A1 |
| БЕСКОНТАКТНЫЙ СИНУСНО-КОСИНУСНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 1951 |
|
SU100678A1 |
.I
Изобретение относится к области автоматики, телемеханики и измерительной тех НИКИ :й может быть использована для преобразования -аналоговых величин в электрический сигнал, в частности в преобразовател-ях; «угол-код для систем числового программного управления станками и в графических координатографах.
Известен бесконтактный датчик угловых .перемещений, содержащий рабочие печатные обмотки на торцовых поверхностях статора i:H ротора и трансформатор, обеспечивафщий бесконтакное питание. Трансформатор размещен на валу. Подвижная обнотка; соединена с рабочей обмоткой ротора, а неподвижная -г- с источником питания fl.
Такое решение непригодно в случае использования датчика в видеотдельных деталей статора и ротора без собственных опор.
также бесконтактный индуктосин, содержащий статор и ротор с печатными рабочими обмотками на торцовых поверхностях и обмотки питания, одна из которых, подвижная, соединена с рабочей обмоткой ротора, а другая, неподвижная е источником питания 21.
Обмотки питания выполнены намоткой в кольцевых проточках, расположенных по внутренним Д1 аметрам статора и ротора.
Данное устройство является наиболее близким к изобретению по технической сущности и достигаемому результату.
Недостатком устройства является погрешность, связанная с эксцентричным расположением, рабочих обмоток и обмоток питания. Это приводит либо к нестабильности напряжения во вторичных обмотках питания (если обеспечивается соосность посадочных мест и рабочих обмоток), либо Кпогрешности от эксцентриситета рабочих обмоток относительно оси вращения.
Другим недостатком является паразит5 пая наводка в рабочих обмотках. Эта наводка вызвана токами в лобовых частях первичной рабочей обмотки и токами в обмотках питания. Для снижения последней прибегают к экранирова1П{ю обмоток пита0 пня, что приводит к усложнению технологии изготовления.
Целью изобретения является повышение точности и унрощение технологии изготов-: ления.
Поставленная цель .чостпгаегтя том, что каждая из обмоток питания ныгкушена в виде концентрических iie4eTTin ix Г1рояолников и размещена на торцовых поверхностях статора и ротора.
Кроме того, с целью снижения погрешности от Г1аразит}1ых наводок, подвижная обмотка питания ротора выполнена из двух частей, расположенных с двух сторон лобовых частей рабочей обмотки, причем части обмотки питания соединены между собой через активный проводник рабочей обмотки,
Рабочие обмотки и обмотки питания могут быть как однослойными, так и многослойными. Расположены они могут быть и одной или разных плоскостях. Проводники, соединяющие соседние витки печатной обмотки трансформатора питания, разметены по окружности равномерно, причем число интервалов, на которое разбивается окружность при размещении этих проводников, на статоре и роторе отличается на единицу. Таким образом, при вращении ротора одновременно может совпасть положение только одного соединительного проводника на статоре и .роторе.
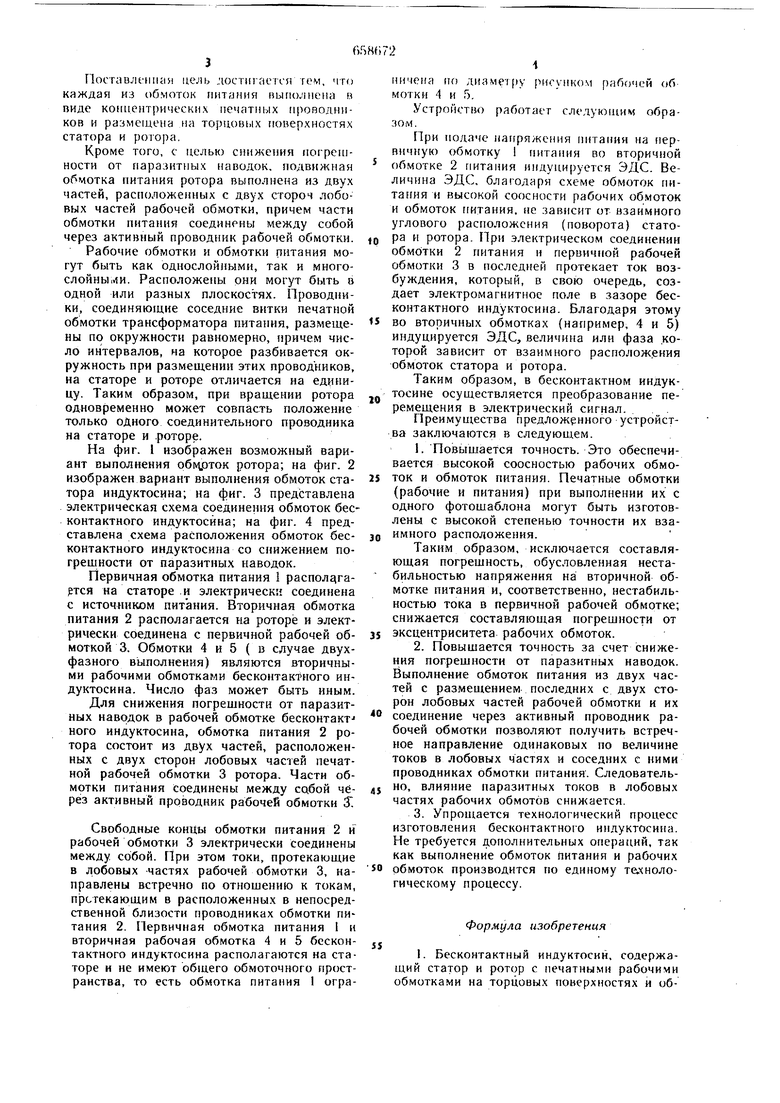
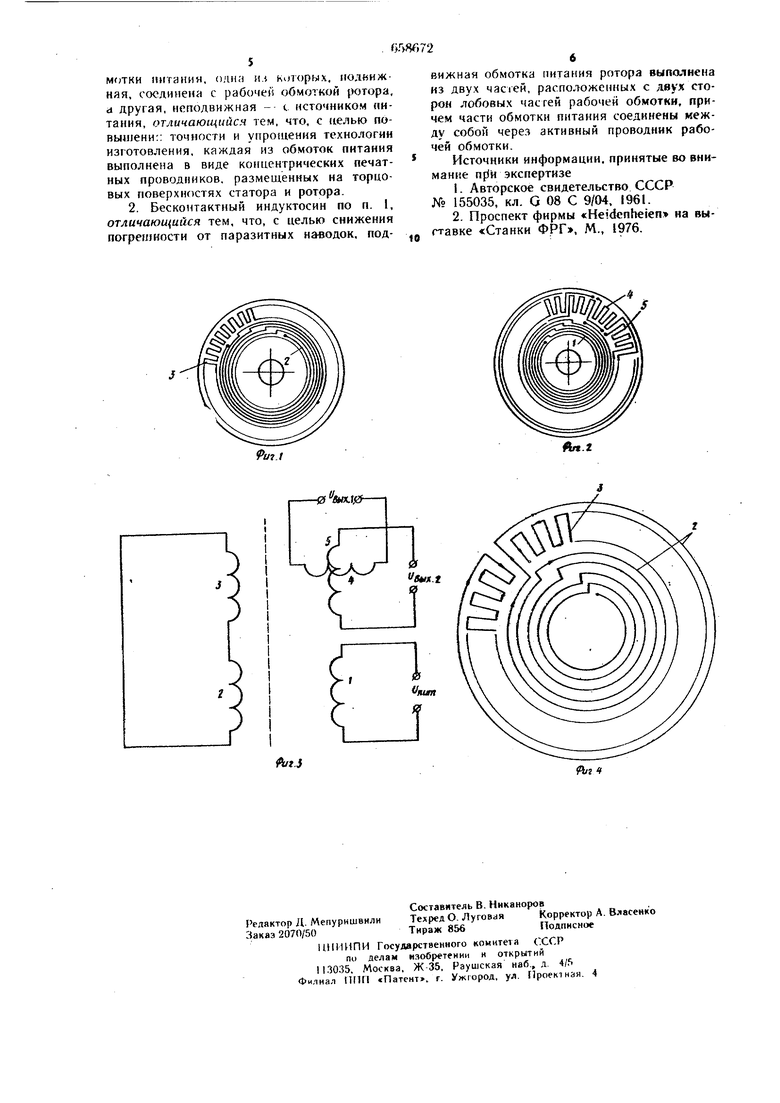
На фиг. I изображен возможный вариант выполнения облфток ротора; на фиг. 2 изображен вариант выполнения обмоток статора индуктосина; на фиг. 3 представлена электрическая схема соединения обмоток бесконтактного индуктосина; на фиг. 4 представлена схема расположения обмоток бесконтактного индуктосина со снижением погрешности от паразитных наводок.
Первичная обмотка питания 1 располцгартся на статоре .и электрически соединена с источником питания. Вторичная обмотка питания 2 располагается на роторе и электрически соединена с первичной рабочей обмоткой 3. Обмотки 4 и 5 ( 13 случае двухфазного вьшолнения) являются вторичными рабочими обмотками бесконтактного индуктосина. Число фаз может быть иным. Для снижения погрешности от паразитных наводок в рабочей обмотке бесконтакт-ного индуктоснна, обмотка питания 2 ротора состоит из двух частей, расположенных с двух сторон лобовых частей печатной рабочей обмотки 3 ротора. Части обмотки питания соединены между собой чёрез активный проводник рабочей обмотки 3.
Свободные КОН1ХЫ обмотки питания 2 и рабочей обмотки 3 электрически соединены между собой. При этом токи, протекающие в лобовых частях рабочей обмотки 3, направлены встречно по отнощению к токам, протекающим в расположенных в непосредственной близости проводниках обмотки питания 2. Первичная обмотка питания 1 и вторичная рабочая обмотка 4 и 5 бесконтактного индуктосина располагаются на статоре и не имеют общего обмоточного пространства, то есть обмотка питания I ограничена (ю диамет(у рисунком рабочей обмотки 4 и 5,
Устройство работает следующим образом.
При подаче напряжения питания на tiepвнчную обмотку 1 питания во вторичной обмотке 2 питания индуцируется ЭДС. Величина ЭДС, благодаря схеме обмоток питания и высокой соосности рабочих обмоток и обмоток питания, пе зависит от взаимного углового расположения (поворота) статора и ротора. При электрическом соединении обмбткн 2 питания и первичной рабочей обмотки 3 в последней протекает ток возбуждения, который, в свою очередь, создает электромагнитное поле в зазоре бесконтактного индуктосина. Благодаря этому во вторичных обмотках {например, 4 и 5) индуцируется ЭДС, величина или фаза которой зависит от взаимного расположения обмоток статора и ротора.
Таким образом, в бесконтактном индуктосине осуществляется преобразование перемещения в электрический сигнал.
Преимущества предложенного устройства заключаются в следующем.
Таким образом, исключается составляющая погрешность, обусловленная нестабильностью напряжения на вторичной обмотке питания и, соответственно, нестабильностью тока в первичной рабочей обмотке; снижается составляющая погрешности от эксцентриситета рабочих обмоток.
Формула изобретения
Источники информации, принятые во внимание экспертизе
UJ.J
fkn.t
ft/jj
Svx.t
пит
й/г 1
