ю
о
Изобретение относится к измерительной технике и может быть использовано при построении растровых датчиков перемещения.
Известны узлы растровых сопряжений преобразователей линейных и угловых перемещений, содержащие две плоские линейки в виде сопряжения параллельно линейного растра и нониусного растра.
Наиболее близким по технической сущности к изобретению является узел растрового сопряжения преобразователя линейных и угловых перемещений, содержащий подвижный и неподвижный элементы, выполненные в виде коаксиальных цилиндров с штриховыми решетками, помещенными соответственно на внутренней поверхности внешнего и внешней поверхности внутреннего цилиндров.
Узел имеет недостаточную точность преобразования из-за погрешности нанесения растров.
Цель изобретения - повышение точности преобразования.
Указанная цель достигается тем, что в узле растрового сопряжения преобразователя линейных и угловых перемещений, содержащем подвижный и неподвижный элементы, выполненные в виде коаксиальных цилиндров с штриховыми решетками, помещенными соответственно на внутренней поверхности внешнего и внешней поверхности внутреннего цилиндров, штриховые решетки нанесены относительно оси цилиндров по винтовой линии.
Винтовая линия непрерывна и технологически может быть нанесена с большей точностью, чем прерывистые штрихи, что повышает точность преобразования.
На чертеже представлен узел растрового сопряжения преобразователя линейных и угловых перемещений.
)
Узел растрового сопряжения преобразователя линейных и угловых перемещений состоит из коаксиальных цилиндров 1 и 2, На внешнюю поверхность внутреннего цилиндра 1 и на внутреннюю поверхность внешнего цилиндра 2 нанесены по винтовой линии штриховые решетки 3.
Узел работает следующим образом. Сопряженные растры образуют муаровую картину. При перемещении цилиндра 2 относительно цилиндра 1, линейном или угловом, муаровая картина меняется: перемещаются полосы, темные и светлые, а если шаг и направление обоих винтовых
растров одинаковы, то происходят затемнения и просветления картины по всей площади сопряжения растров. Если винтовые линии растров направлены встречно, полосы располагаются вдоль оси цилиндров, если шаг одинаков, и по винтовой, если шаг разный.
Если винтовые линии растров направлены одинаково, полосы располагаются по винтовой с тем большим шагом, чем меньше
отличаются шаги винтовых растрбв.
Использование узла позволяет повысить точность преобразования линейных и угловых перемещений.
Формула изобретения
Узел растрового сопряжения преобразователя линейных и угловых перемещений, содержащий подвижный и неподвижный элементы, выполненные в виде коаксиальных цилиндров с штриховыми решетками, помещенными соответственно на внутренней поверхности внешнего и внешней поверхности внутреннего цилиндров, отличающийся тем, что, с целью повышения
точности преобразования, штриховые решетки нанесены относительно оси цилиндров по винтовой линии.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЕОБРАЗОВАТЕЛЬ КРУГОВЫХ ПЕРЕМЕЩЕНИЙ | 1990 |
|
RU2057287C1 |
| ФАЗОРАСЩЕПИТЕЛЬ | 1973 |
|
SU388233A1 |
| Фотоэлектрический преобразователь перемещения | 1989 |
|
SU1693380A1 |
| Устройство для измерения перемещений | 1988 |
|
SU1714342A1 |
| Способ слежения за положением глаз пользователя и контактная линза (варианты) | 2023 |
|
RU2817166C1 |
| Оптический способ измерения линейных перемещений | 1986 |
|
SU1404809A1 |
| Фотоэлектрический преобразователь перемещения в фазовый сдвиг сигнала | 1982 |
|
SU1030828A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ОТКЛОНЕНИЙ ОТ ПЛОСКОСТНОСТИ ПОВЕРХНОСТИ | 2004 |
|
RU2287776C2 |
| Фотоэлектрический преобразователь угла поворота вала в код | 1982 |
|
SU1037310A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 1970 |
|
SU282091A1 |
Изобретение относится к измерительной технике. Цель изобретения - повышение точности измерений за счет более точного нанесения ребровых решеток. На коаксиаль- но расположенные цилиндры 1, 2 нанесены по винтовой линии растровые решетки 3. При перемещении цилиндра 2 относительно цилиндра 1 формируется муаровая картина, которая перемещается в различных направлениях в зависимости от направления и шага растровых решеток 3. 1 ил.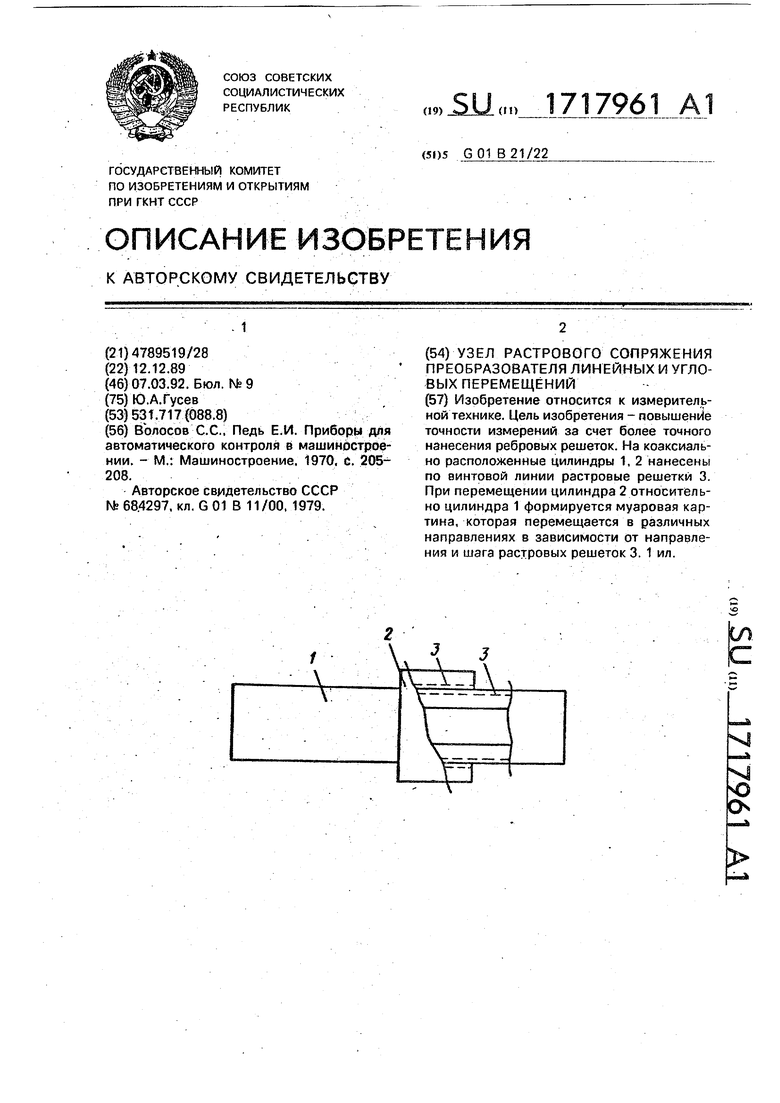
| Волосов С.С. | |||
| Педь Е.И | |||
| Приборы для автоматического контроля в машинбстроении | |||
| - М.: Машиностроение, 1970, С | |||
| СПОСОБ ПОЛУЧЕНИЯ ПОЛИИМЙДНОГО ВОЛОКНА | 0 |
|
SU205208A1 |
| Способ получения смеси хлоргидратов опийных алкалоидов (пантопона) из опийных вытяжек с любым содержанием морфия | 1921 |
|
SU68A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
