Изобретение относится к автоматике и может быть использовано в системах программного управления двухпозиционными объектами по заданной циклограмме.
Известны устройства для программного управления, содержащие датчики начального и конечного положения объектов, элементы , элемент И, формирователь импульсов, элементы ИЛИ, распределитель импульсов, блок задания программ и выходные триггеры 1.
Недостатком этих устройств является то, что они не обеспечивают параллельной отработки нескольких независимых программ управления, неоднородность их структуры усложняет наращивание устройства при увеличении числа управляемых объектов.
Наиболее близким по технической сущности к предлагаемому является устройство для программного управления объектами, содержащее датчики положения объектов, блок согласующих усилителей, четыре переключающих элемента, элемент выбора такта, установочный элемент управления и режимный элемент управления, блок распределения команд, выполненный в виде ячеек управления, каждая из которых выполнена в виде аппарата релейного действия с памятью на один такт и содержит управляющий элемент с двумя замыкающими контактами, три развязывающих диодах и элемент индикации 2.
Недостатком этого устройства является отсутствие единого программоносителя, что усложняет процесс программирования и перепрограммирования. Для программирования устройства согласно какой-либо циклограмме управления объектами необходимо кроме определенной установки диодов в диодной матрице, включающих в работу объекты управления через блок согласующих усилителей, произвести также определенные коммутационные соединения между ячейками управления в блоке распределения команд, организующие логическую работу объектов управления. Если же, например, системой объектов необходимо управлять по разным циклограммам, то для перехода на другую программу необходима замена блока распределения команде новыми связями между ячейками управления и диодной матрицы с новой комбинацией диодов, являющимися основными узлами устройства программного управления. Кроме этого, при перепрограммировании устройства необходимо также изменять коммутационные соединения датчиков положения с ячейками управления согласно условию перехода от такта к такту.
К недостаткам устройства следует отнести также то, что включение реле в ячейке управления происходит через эквивалентное сопротивление параллельно содинен- иых обмотки реле и элемента индикации предыдущей ячейки управления, что снижает надежность включения реле, а значит, и надежность ячейки управления и делает необходимым увеличение питающего напряжения, что ведет к дополнительному потреблению энергии, особенно при большом количестве ячеек управления.
Кроме того, недостатками устройства являются: ограничение функциональной
возможности ячейки управления, способной управлять только одним тактом объекта или объектов управления; невозможность перехода от такта к такту выключением двух
или нескольких ячеек управления с контролем от датчиков положения согласно одному из условий перехода от такта к такту, т.е. включенное состояние предыдущей (одной) по циклу ячейки управления, например,при
0 разветвлении цикла на два или несколько параллельных участков и при переходе на следующий общий такт, что ограничивает функциональные возможности устройства; при установке объектов управления .в на5 чальное положение нет общего контроля начального положения объектов управления и поэтому возможен запуск устройства при условии, когда не все объекты управления находятся е начальном положении, что мо0 жет быть причиной аварийной ситуации.
.Цель изобретения - расширение функциональных возможностей путем программной реализации любых логических функций, взаимосвязывающих работу обь5 ектов управления согласно заданной циклограмме, возможности работы по временному принципу и возможности ввода при необходимости вспомогательных устройств, а также повышение надежности и
0 упрощение программирования устройства. Поставленная цель достигается тем, что, в устройство для программного управления введены блок управления режимами и формирователи временных интервалов, в
5 диодную матрицу введены дополнительные входные и выходные шины, каждая ячейка управления содержит три элемента НЕ, два элемента 2И-НЕ, три элемента ЗИ-НЕ и диод, вход первого элемента НЕ является пер0 вым входом ячейки управления, а выход - первым выходом ячейки управления, вход второго элемента НЕ соединен с вторым входом ячейки и с первым входом первого элемента 2И-НЁ, вход третьего элемента
5 НЕ соединен с третьим входом ячейки и с первым входом первого элемента ЗИ-НЕ, выход второго элемента НЕ соединен с первым входом второго элемента ЗИ-НЕ, выход третьего элемента НЕ соединен с вторым
0 входом второго элемента ЗИ-НЕ, второй вход первого элемента 2И-НЕ, соединенный с вторым входом первого элемента ЗИ-НЕ и с третьим входом второго элемента ЗИ-НЕ, является четвертым входом
5 ячейки управления, выходы первого элемента 2И-НЕ, соединенного с третьим входом первого элемента ЗИ-НЕ, второго элемента ЗИ-НЕ и первого элемента ЗИ-НЕ являются соответственно вторым, третьим и четвертым выходами ячейки управления, выход первого элемента ЗИ-НЕ через диод соединен с установочным входом элемента памяти, сбросовый вход элемента памяти является пятым входом ячейки управления, а выход элемента памяти соединен с первым входом третьего элемента ЗИ-НЕ, соединенного вторым входом с первым входом первого элемента 2И-НЕ, и с первым входом второго элемента 2И-НЕ, второй вход которого является шестым входом ячейки управления, а установочный вход элемента памяти является седьмым входом ячейки управления, выходы второго элемента 2И-НЕ и выход третьего элемента ЗИ-НЕ являются соответственно пятым и шестым выходами ячейки управления, а третий вход третьего элемента ЗИ-НЕ является восьмым входом ячейки управления, каждая из ячеек управления первым и с четвертого по восьмой входами соединена с соответствующими выходными шинами, а выходами - с соответствующими входными шинами диодной матрицы программного блока, второй и третий входы ячейки управления соединены с выходами соответствующих датчиков начального и конечного положения, входы которых подключены к шине напряжения низкого уровня, с которой входом напряжения низкого уровня соединен блок управления режимами, группа входов которого подключена к выходам датчиков начального положения, установочный выход блока управления режимами соединен с соответствующей входной шиной диодной матрицы, вход цикличности блока управления режимами подключен к соответствующей выходной шине диодной матрицы, выход цикличности блока управления режимами через формирователь временных интервалов соединен с соответствующей входной шиной диодной матрицы.
С целью общего управления устройства блок управления режимами содержит элемент И, элемент памяти типа реле с переключающим контактом, два элемента управления и переключающий элемент, причем группа входов элемента И является группой входов блока, выход элемента И соединен с первым выводом обмотки реле, второй вывод которого через размыкающий контакт первого элемента управления подключен к первому выводу первого замыкающего контакта второго элемента управления и к замыкающему выводу переключающего контакта реле, размыкающий вывод этого контакта является установочным выходом блока, а общий вывод переключающего контакта элемента памяти соединен с вторым выводом первого замыкающего контакта второго элемента управления и является входом напряжения низкого уровня блока, первый вывод второго замыкающего контакта второго элемента управления является выходом цикличности блока и через размыкающий контакт переключающего элемента подключен к йторому выводу второго замыкающего контакта второго элемента управления и к входу цикличности блока. Блок управления режимами позволяет при включении питания устанавливать ячейки управления в исходное состо- яние готовности к работе и объекты управления в начальное положение, производить запуск в работу устройства только после установления обьектов управления в начальное положение, производить останов, а также управлять автоматическим и циклическим режимами работы устройства программного управления.
Устройство программного управления с целью расширения функциональных возможностей позволяет ввести технологическое оборудование, входами и выходами подключенное соответственно к дополнительным выходным и входным шинам диодной матрицы.
С целью организации работы по временному принципу в устройство введена группа формирователей временных интервалов, подключенных входами и выходами соответственно к дополнительным выходным и входным шинам диодной матрицы.
Вводя в устройство аварийные датчики, подключенные к дополнительным входным шинам, можно упралять безаварийным положением обьектов управления.
С целью организации логической взаимосвязи между ячейками управления, а значит, и между объектами управления введена группа элементов НЕ, число которых соответствует числу программно организуемых взаимосвязей и входы которых соединены с выходными, а выходы с входными шинами диодной матрицы программного блока.
Программное управление ячейки управления происходит по шести входам (первым и с четвертого по восьмой) посредством соединения входов с выходами ячейки управления через диоды в диодной матрице.
При этом первый вход ячейки управления, соединенный с одной из выходных шин диодной матрицы, служит для программного управления установкой ячейки уп равле- ния в исходное состояние готовности к работе и объекта управления в начальное положение.
Четвертый вход ячейки управления, соединенный с одной из выходных шин диодной матрицы, служит для программного
формирования цифрового сигнала на ход вперед.
Пятый вход ячейки управления, соединенный с одной из выходных шин диодной матрицы, служит для программного управления установочным входом элемента памяти.
Шестой вход ячейки управления, соединенный с одной из выходных шин диодной матрицы, служит для программного формирования цифрового сигнала на ход назад объекта управления.
Седьмой вход ячейки управления,- соединенный с одной из выходных шин диодной матрицы, служит для программного управления сбросовым входом элемента памяти ячейки управления.
Восьмой вход ячейки управления, соединенный с одной из выходных шин диодной матрицы, служит для программного формирования цифрового сигнала возвра- -щения объекта управления в начальное положение.
Первый .выход ячейки управления, соединенный с одной из входных шин диодной матрицу, служит для установки ячейки уп- .равления в исходное состояние готовности к работе и объекта управления в начальное положение..
Второй выход ячейки управления, соединенный с одной из входных шин диодной матрицы, служит для организации хода вперед объекта управления на время включенного состояния датчика начального положения.
Третий выход ячейки управления, соединенный с одной из входных шин диодной матрицы, служит для организации хода вперед объекта управления в момент времени отключенных состояний датчиков начального и конечного положения.
Четвертый выход ячейки управления, соединенный с одной из входных шин диодной матрицы, служит для выдачи цифрового сигнала о приходе объекта управления в конечное положение.
Пятый выход ячейки управления, соединенный с одной из входных шин диодной матрицы, служит для организации хода назад объекта управления.
Шестой выход ячейки управления, соединенный с одной из входных шин диодной матрицы, служит для выдачи цифрового сигнала о возвращении объекта управления в начальное положение. .
Новизной устройства програмного управления является наличие единого программоносителя в виде диодной матрицы, что упрощает программирование и перепрограммирование. В отличии от известного устройства, в котором логическая взаимосвязь между ячейками управления осуществляется коммутационными соединениями в блоке распределения команд и коммутационными соединениями датчиков с ячейками управления, взаимосвязь между ячейками управления в предлагаемом устройстве осуществляется диодной матрицей, которая посредством диодов производит включение
0- объектов управления, организовывает управление ячейками управления и логическую взаимосвязь между ячейками управления, подчиненную циклограмме работы объектов управления.
5 Кроме того, ячейка управления предлагаемого устройства, является цифровым устройством, позволяет самостоятельно управлять двухпозиционным объектом управления, а значит, его двумя тактами (хо0 дом вперед и ходом назад) в отличие от ячейки управления известного устройства, управляющей одним тактом, что дает определенному числу ячеек управления предлагаемого устройства программного
5 управления реализовать большее число тактов работы объектов управления, чем тому же числу ячеек управления известного устройства. Ячейка управления позволяет получать цифровую информацию не толь0 ко о нахождении двухпозиционного объекта управления в начальном и конечном положении, но и в промежуточном, когда .двухпозиционный объект управления совершает движение из начального положения в
5 конечное и из конечного положения в начальное, и цифровой сигнал о возвращении объекта управления в начальное положение.
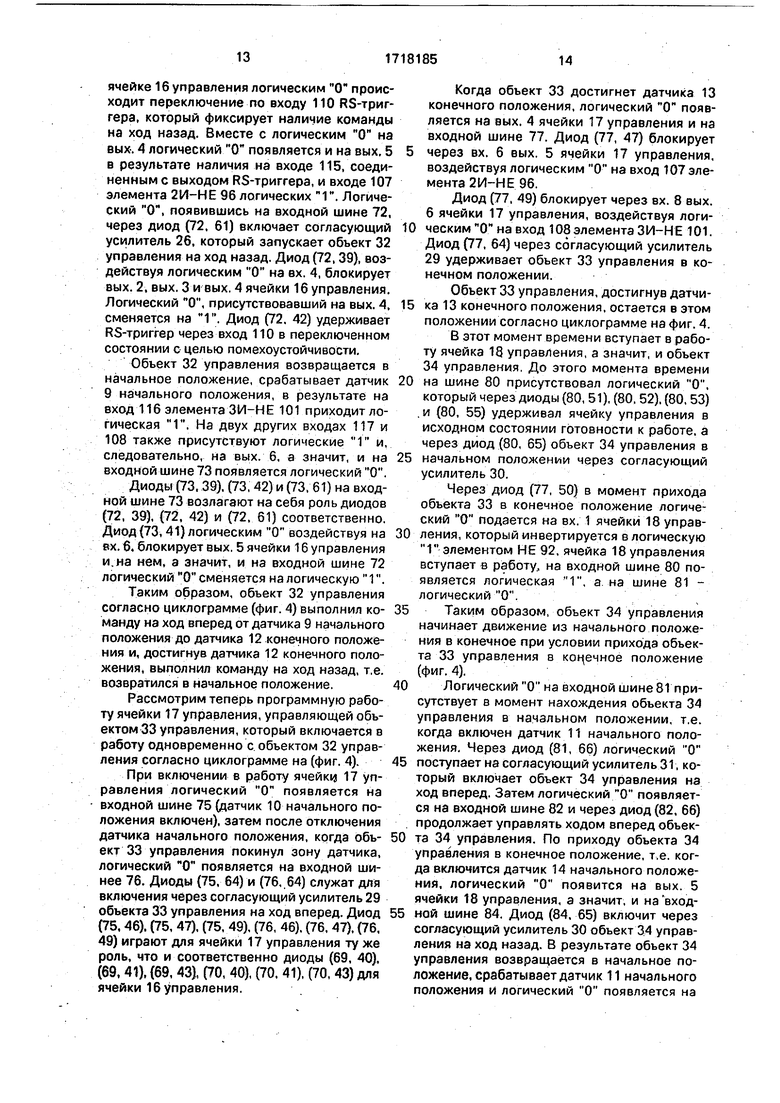
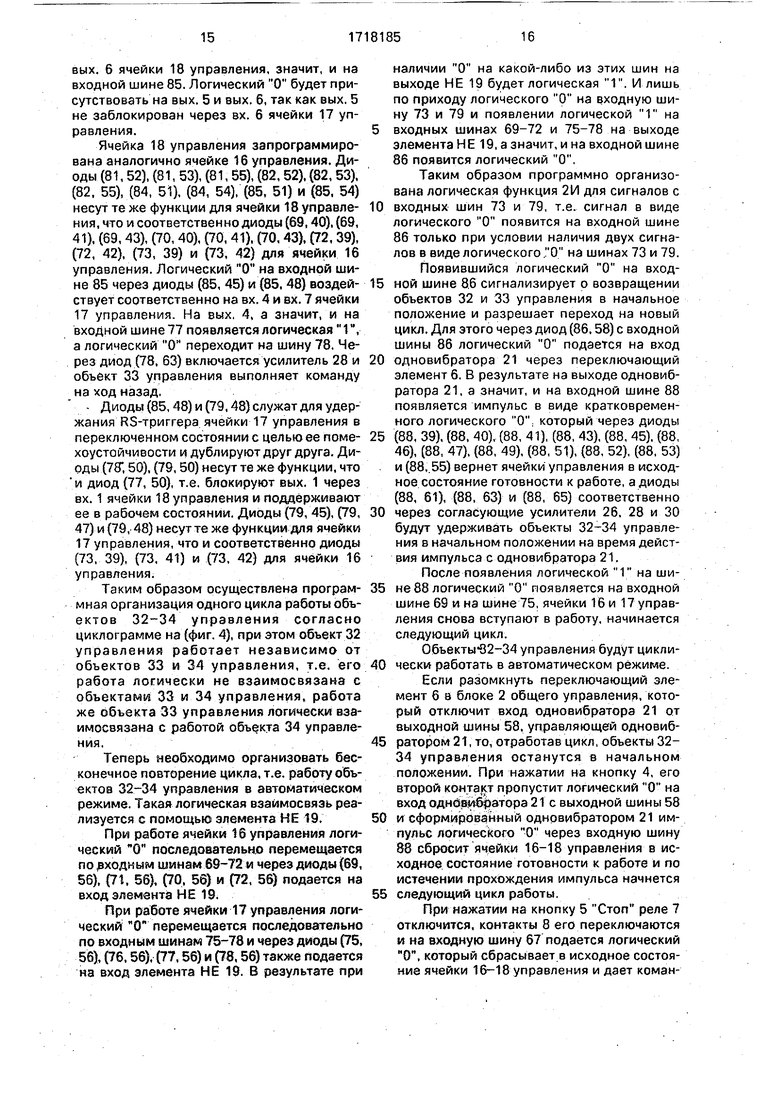
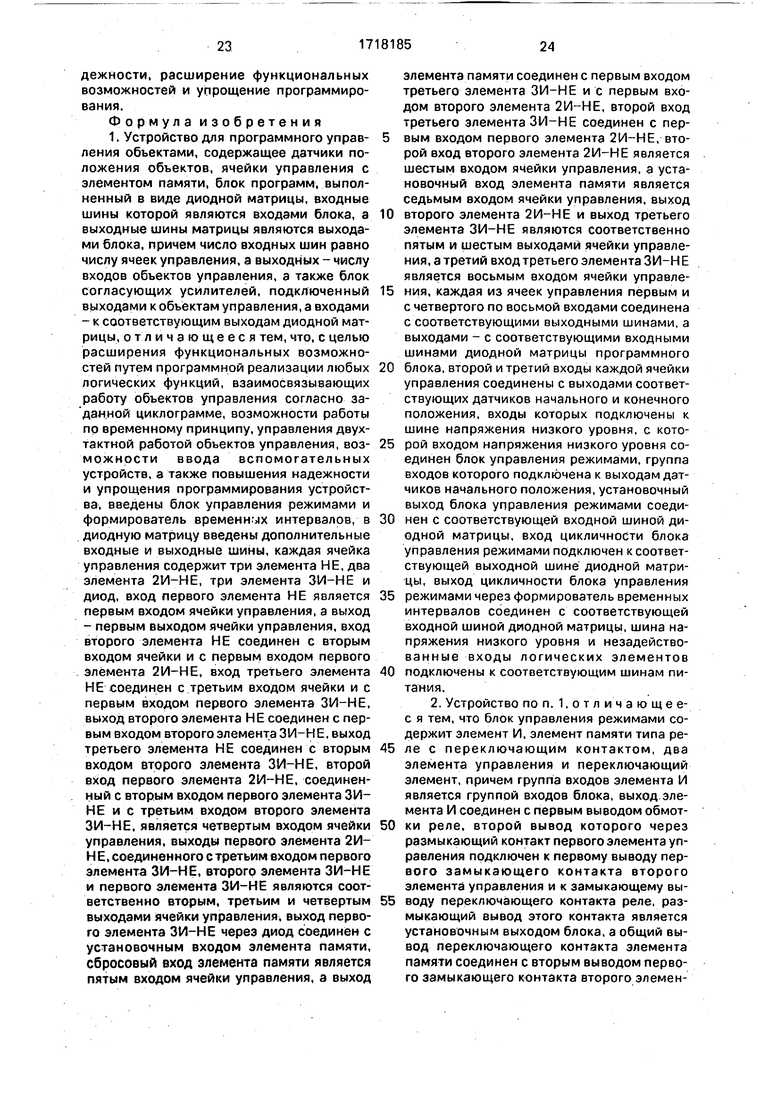
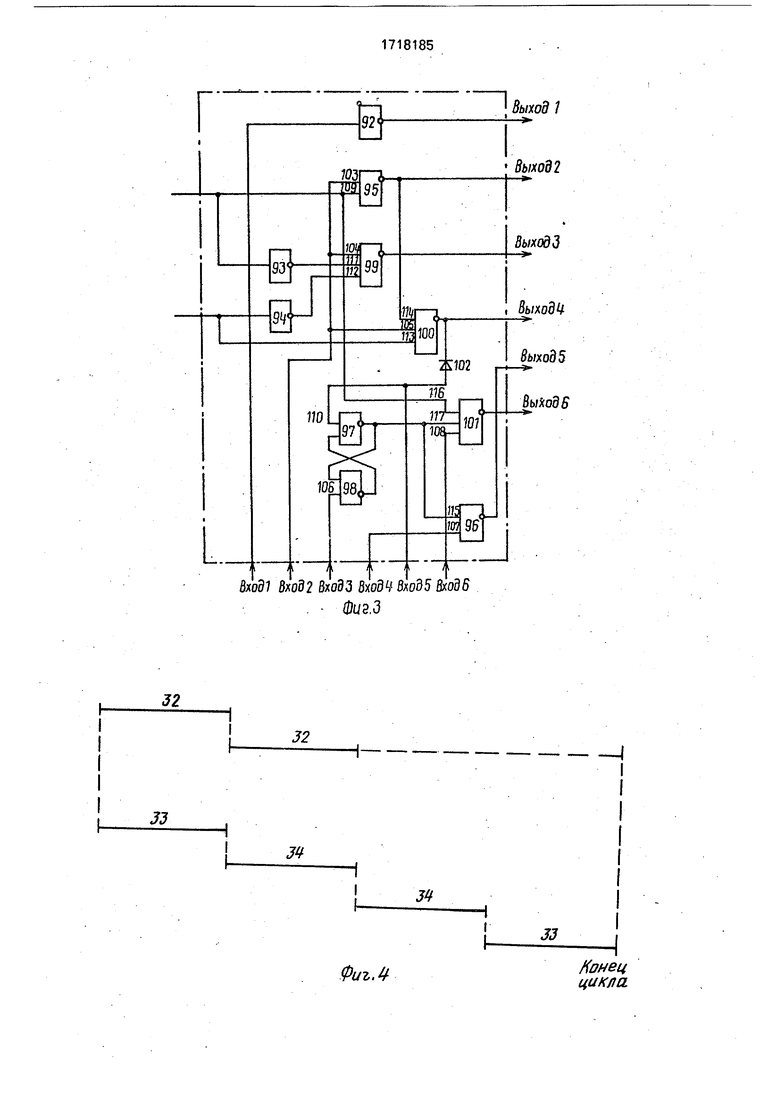
На фиг. 1 приведена функциональная схема устройства для программного управ0 ления; на фиг. 2 - ее программная часть в виде диодной матрицы; на фиг. 3 - принципиальная схема ячейки управления; на фиг.
4- циклограмма работы объектов управления, которые программно реализуются с по5 мощью диодной матрицы на фиг. 2; на фиг.
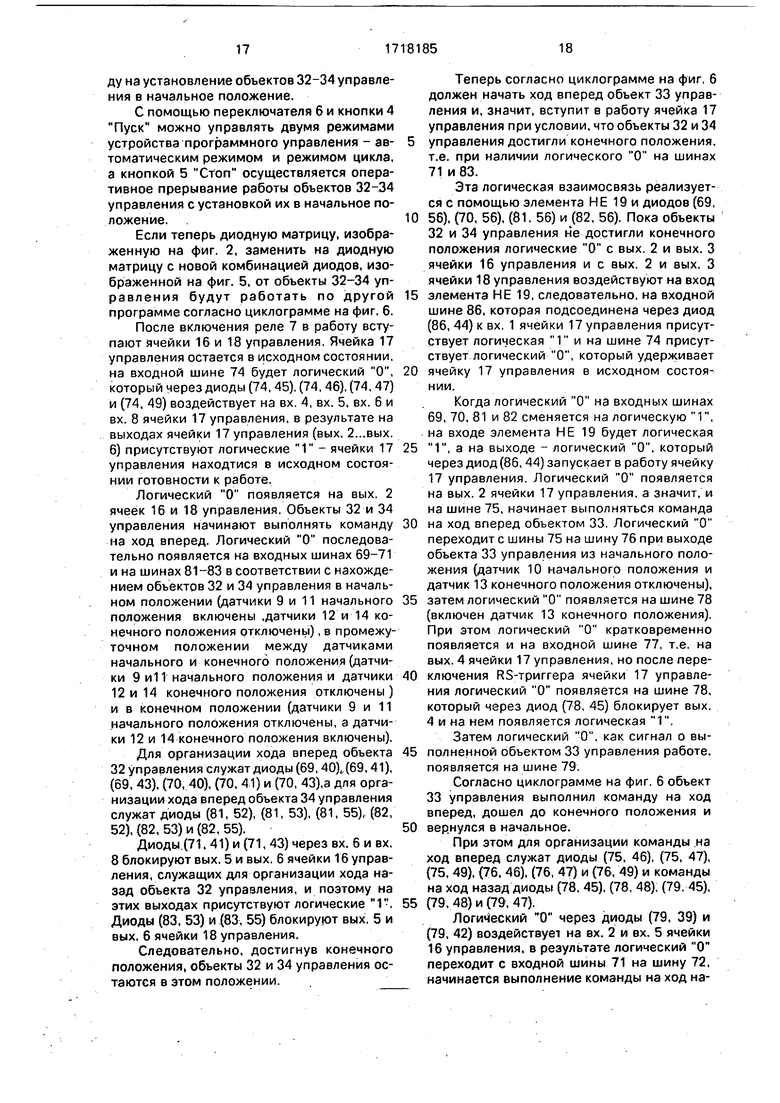
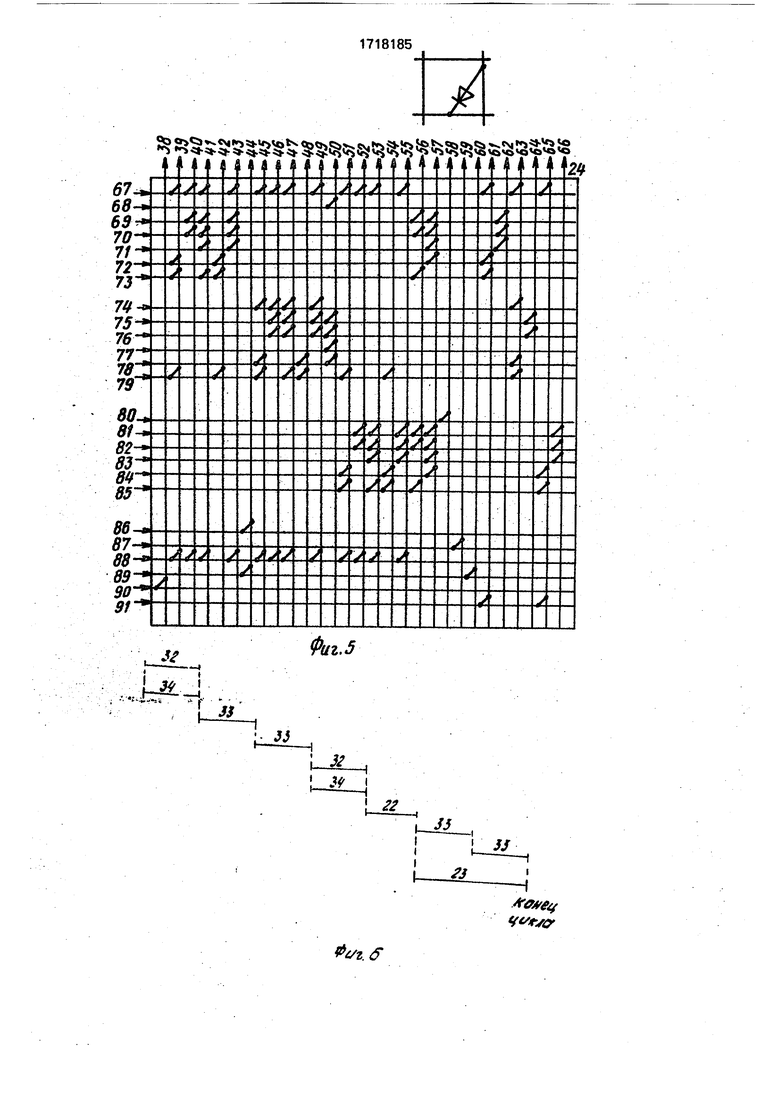
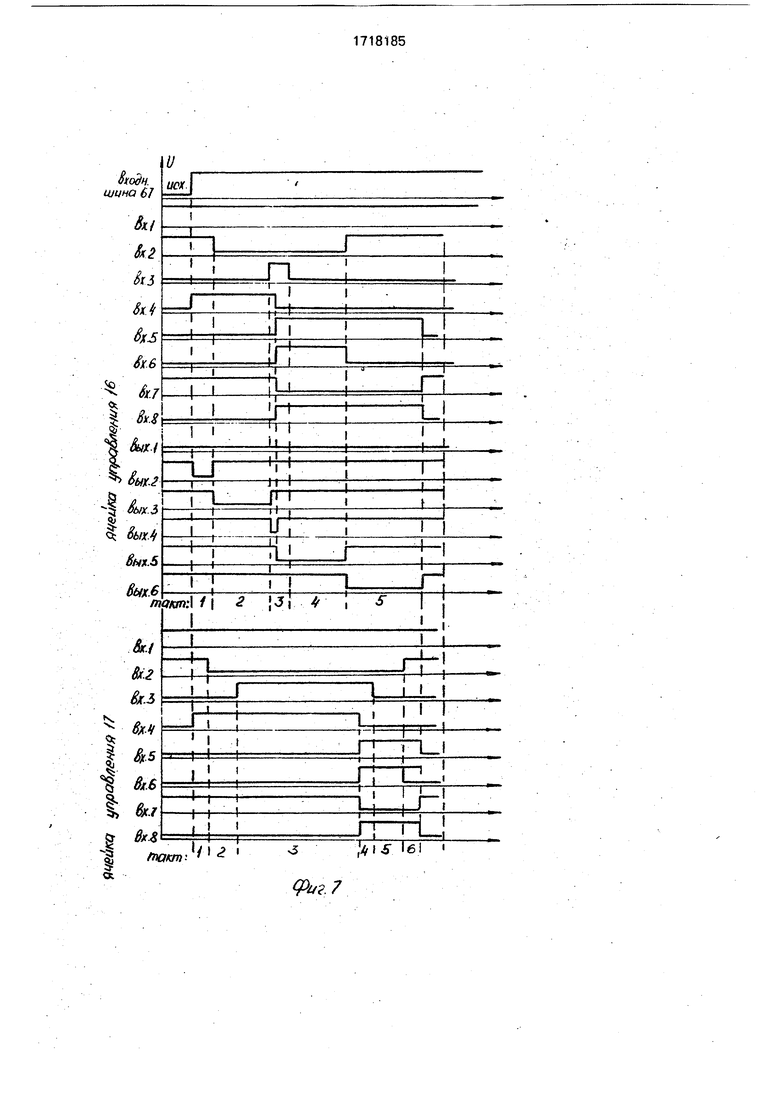
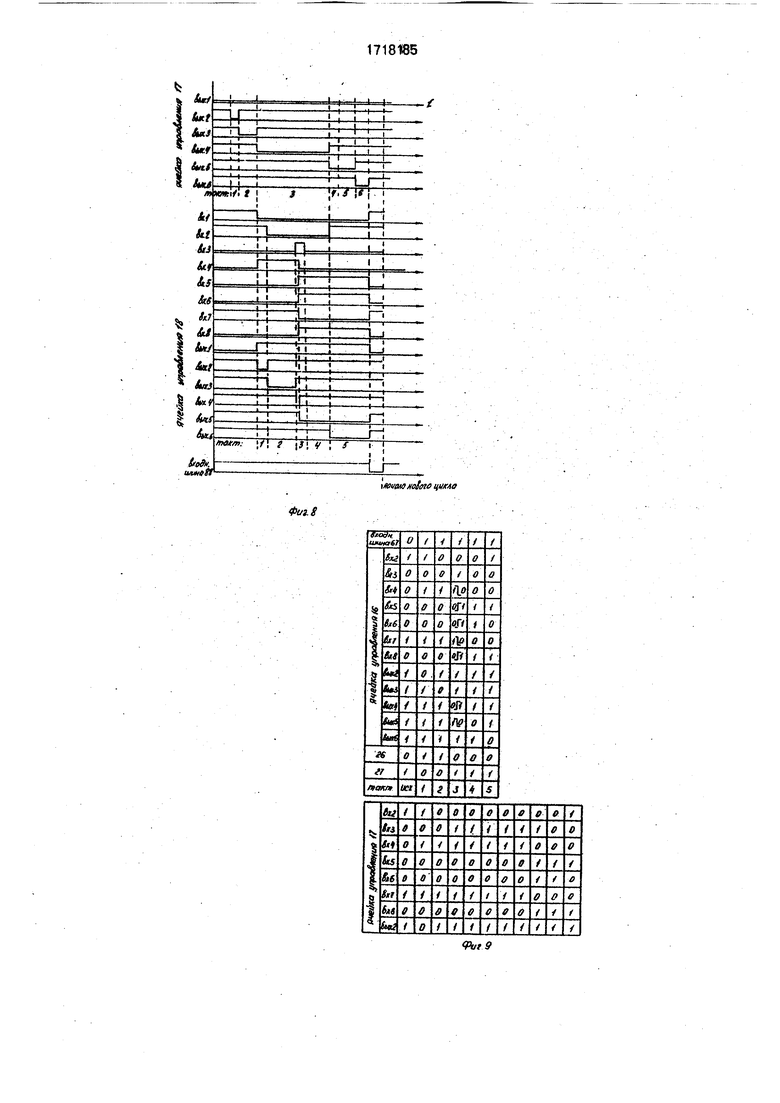
5- диодная матрица с программой, организующей работу объектов управления; на фиг. 6- циклограмма ее работы; на фиг. 7 и 8 - временные диаграммы работы устройства;
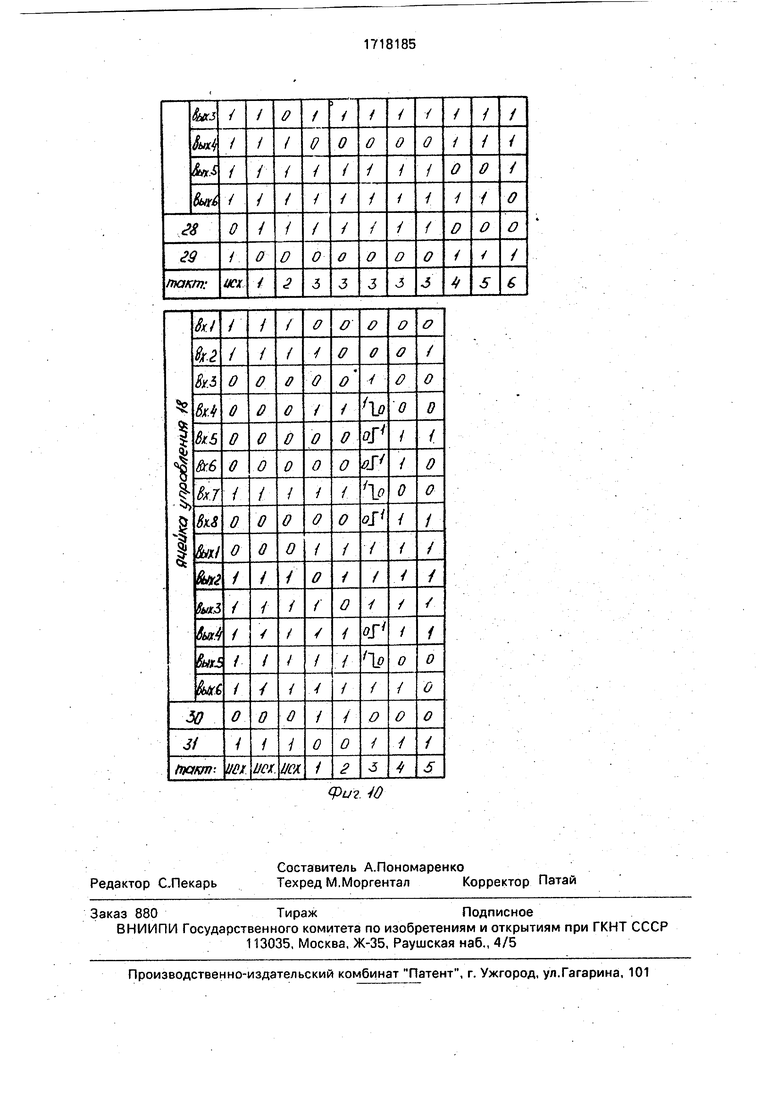
0 на фиг. 9 и 10 - таблицы состояний цифровых сигналов согласно циклограмме фиг. 4.
Устройство для программного управления (фиг. 1 и 2) содержит шину 1 с напряжением низкого уровня, соответствующим
5 логическому О, блок 2 управления режимами с элементом ЗИ 3, с элементами управления в виде кнопки 4 с двойными контактами и кнопки 5, с переключающим элементом в виде тумблера 6 с размыкающими контактами, с элементом памяти в виде реле 7 с
контактами 8, датчики 9-11 начального положения объектов управления, датчики 12- 14 конечного положения объектов, аварийный датчик 15, ячейки 16-18управле- ния, элементы НЕ 1.9 и 20. формирователи временных интервалов - одновибратор 21 и формирователь 22 временной задержки, технологическое оборудование 23, диодную матрицу 24 (фиг. 2), блок 25 согласующих усилителей с усилителями 26-31 и двухпози- ционные объекты 32-34 управления.
Шина 1 через датчики 9-11 начального положения соединена соответственно с вх. 2 ячеек 16-18 управления, а через датчики 12-14 конечного положения - соответственно с вх.З ячеек управления.
Датчики начального положения соединены с группой входов 35-37 элемента ЗИ 3 блока 2 управления режимами. Входы ячейки 16 управления (вх. 1, вх. 4...вх. 8) соединены с выходными шинами 38-43. входы ячейки 17 управления (вх. 1, вх. 4...вх. 8) соединены с выходными шинами 44-49. входы ячейки 18 управления (вх. 1, вх. 4„.вх. 8) соединены с выходными шинами 50-55, входы элемента НЕ 19 и элемента НЕ 20 соединены соответственно с выходными шинами 56 и 57, вход одновибратора 21 через параллельно соединенные контакты кнопки 4 и контакты переключающего элемента 6 блока 2 управления режимами соединены с выходной шиной 58. вход формирователя 22 временной задержки подключен к выходной шине 59, цифровой вход включения технологического оборудования 23 соединен с выходной шиной 60 и входы согласующих усилителей (например, транзисторных ключей) 26-31 соединены соответственное выходными шинами 61-66 в диодной матрице 24.
Согласующие усилители 26 и 27 соединены с объектом 32 управления и служат для управления его ходом вперед и назад, согласующие усилители 28 и 29 соединены с объектом 33 управления и служит для управления его ходом вперед и назад, согласующие усилители 30 и 31 соединены с объектом 34 управления и служат для управления его ходом вперед и назад (объекты управления могут быть электропневмокла- пана, электродвигатели и т.д.).
Шина 1 через размыкающие контакты 8 реле 7 подключена к входной шине 67. Выходы ячейки 16 управления подсоединены к входным шинам 68-73, выходы ячейки 17 управления подсоединены к входным шинам 74-79, выходы ячейки 18 управления подсоединены к входным шинам 80-85, выходы элемента НЕ 19 и элемента НЕ 20 присоединены собтветственно к входным
шинам 86 и 87, выход одновибратора 21 присоединен к входной шине 88, выход формирователя 22 задержки времени присоединен к входной шине 89, цифровой выход 5 с технологического оборудования 23 присоединен к входной шине 89, цифровой выход с технологического оборудования 23 присоединен к входной шине 90 и шина 1 через аварийный датчик 15 подключена к входной 0 шине 91 диодной матрицы 24.
Ячейка управления (фиг. 3) содержит элемент НЕ 92, элемент НЕ 93, элемент НЕ 94, элемент 2И-НЕ 96, элемент памяти (RS- триггер, собранный на элементах 2И-НЕ 97 5 и 98), элемент ЗИ-НЕ 99. элемент ЗИ-НЕ 100, элемент ЗИ-НЕ 101 и диод 102.
Устройство для программного управления работает следующим образом.
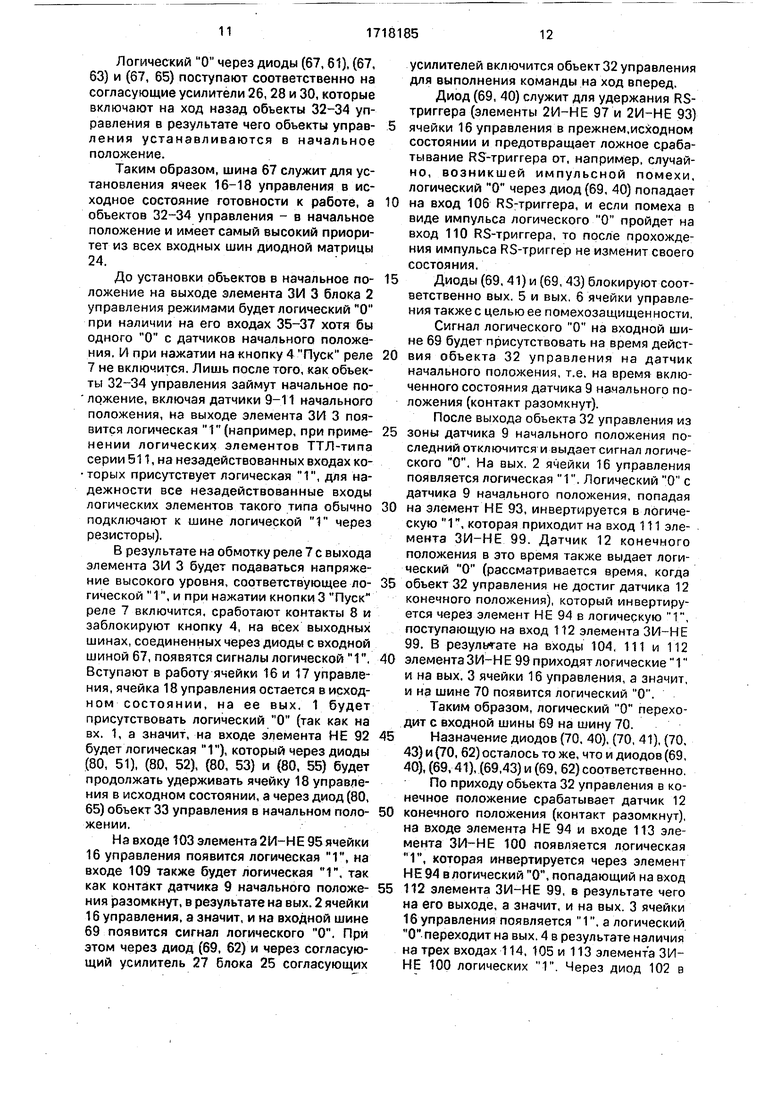
При включении питания на входную ши- 0 ну 67 диодной матрицы 24 через размыкающие контакты 8 реле 7 поступает сигнал в .виде логического- О. Поскольку диодная матрица схематически представляет собой сетку из перпендикулярных и пронумеро- 5 ванных линий, то для удобства.будем обозначать диоды с помощью декартовой системы координат. Например, запись (67, 39) означает, что диод соединен с катодом с входной шиной 67 и анодом с выходной ши- 0 ной 39 диодной матрицы 24.
Через диоды (67. 39), (67, 40), (67. 41) и (67, 43) логический О приходит соответственно на вх. 4, вх. 5, вх. 6, вх. 8 ячейки 16 управления по выходным шинам 39-43. В 5 ячейке 16 управления логический О попадает на вход 103 элемента 2И-НЕ 95, на вход 104 элемента ЗИ-НЕ 99 и на вход 105 элемента ЗИ-НЕ 100. В результате на выходах этих элементов, а значит, и на вых. 2, 0 вых. 3 и вых. 4 будет присутствовать сигнал в виде логической 1. Через диод (67, 40) логической О поступает на вход 106 RS- триггера и устанавливает его в исходное состояние, через диод (67, 41) логический 5 О попадает на вход 107 элемента 2И-НЕ 96 и через диод (67, 43) логический О попадает на вход 108 элемента ЗИ-НЕ 101.
В результате на вых. 4, вых. 5 и вых. 6 ячейки 16 управления также будет присутст- 0 вовать сигнал в виде логической 1.
Таким образом, логический О на шине 67 через диоды (67,39). (67, 40), (67, 41) и (67, 43) устанавливает ячейку 16 управления в исходное состояние готовности к работе, 5 воздействуя на вх. 4, вх. 5, вх. 6 и вх. 8.
Для этой же цели установления ячеек управления в исходное состояние служат диоды (67, 45), (67, 46) и (67, 49) для ячейки 17 управления и диоды (67, 51), (67, 52), (67, 53) и (67, 55) для ячейки 18 управления.
Логический О через диоды (67,61), (67, 3) и (67, 65) поступают соответственно на огласующие усилители 26, 28 и 30, которые включают на ход назад объекты 32-34 упавления в результате чего объекты управения устанавливаются в начальное положение.
Таким образом, шина 67 служит для усановления ячеек 16-18 управления в исодное состояние готовности к работе, а бъектов 32-34 управления - в начальное положение и имеет самый высокий приориет из всех входных шин диодной матрицы 4.
До установки объектов в начальное поожение на выходе элемента ЗИ 3 блока 2 правления режимами будет логический О при наличии на его входах 35-37 хотя бы одного О с датчиков начального положения, И при нажатии на кнопку 4 Пуск реле 7 не включится. Лишь после того, как объекты 32-34 управления займут начальное по- ложение, включая датчики 9-11 начального положения, на выходе элемента ЗИ 3 появится логическая 1 (например, при применении логических элементов ТТЛ-типа серии 511, на незадействованных входах ко- торых присутствует логическая 1, для надежности все незадействованные входы логических элементов такого типа обычно подключают к шине логической 1 через резисторы).
В результате на обмотку реле 7 с выхода элемента ЗИ 3 будет подаваться напряжение высокого уровня, соответствующее логической 1, и при нажатии кнопки 3 Пуск реле 7 включится, сработают контакты 8 и заблокируют кнопку 4, на всех выходных шинах, соединенных через диоды с входной шиной 67, появятся сигналы логической 1. Вступают в работу ячейки 16 и 17 управления, ячейка 18 управления остается в исходном состоянии, на ее вых. 1 будет присутствовать логический О (так как на вх. 1, а значит, на входе элемента НЕ 92 будет логическая 1), который через диоды (80, 51), (80, 52), (80, 53) и (80, 55) будет продолжать удерживать ячейку 18 управления в исходном состоянии, а через диод (80, 65) объект 33 управления в начальном положении.
На входе 103 элемента 2И-НЕ 95 ячейки 16 управления появится логическая 1, на входе 109 также будет логическая 1, так как контакт датчика 9 начального положения разомкнут, в результате на вых. 2 ячейки 16 управления, а значит, и на входной шине 69 появится сигнал логического О. При этом через диод (69, 62) и через согласующий усилитель 27 блока 25 согласующих
усилителей вкл ючится объект 32 управления для выполнения команды на ход вперед.
Диод (69, 40) служит для удержания RS- триггера (элементы 2И-НЕ 97 и 2И-НЕ 93)
ячейки 16 управления в прежнем.исходном состоянии и предотвращает ложное срабатывание RS-триггера от, например, случайно, возникшей импульсной помехи, логический О через диод (69, 40) попадает
0 на вход 106 RS-триггера, и если помеха в виде импульса логического О пройдет на вход 110 RS-триггера, то после прохождения импульса RS-триггер не изменит своего состояния,
5 Диоды (69, 41) и (69, 43) блокируют соответственно вых. 5 и вых, 6 ячейки управления также с целью ее помехозащищенности. Сигнал логического О на входной шине 69 будет присутствовать на время дейст0 вия объекта 32 управления на датчик начального положения, т.е. на время включенного состояния датчика 9 начального положения (контакт разомкнут).
После выхода объекта 32 управления из
5 зоны датчика 9 начального положения последний отключится и выдает сигнал логического О. На вых. 2 ячейки 16 управления появляется логическая 1. Логический О с датчика 9 начального положения, попадая
0 на элемент НЕ 93, инвертируется в логическую 1н, которая приходит на вход 111 элемента ЗИ-НЕ 99. Датчик 12 конечного положения в это время также выдает логический О (рассматривается время, когда
5 объект 32 управления не достиг датчика 12 конечного положения), который инвертируется через элемент НЕ 94 в логическую 1, поступающую на вход 112 элемента ЗИ-НЕ 99. В результате на входы 104, 111 и 112
0 элемента ЗИ-Н Е 99 приходят логические 1 и на вых. 3 ячейки 16 управления, а значит, и на шине 70 появится логический О.
Таким образом, логический О переходит с входной шины 69 на шину 70.
5 Назначение диодов (70. 40), (70, 41), (70, 43) и (70, 62) осталось то же, что и диодов (69, 40), (69,41), (69,43) и (69, 62) соответствен но. По приходу объекта 32 управления в конечное положение срабатывает датчик 12
0 конечного положения (контакт разомкнут), на входе элемента НЕ 94 и входе 113 элемента ЗИ-НЕ 100 появляется логическая 1, которая инвертируется через элемент НЕ94 алогический О, попадающий на вход
5 112 элемента ЗИ-НЕ 99, в результате чего на его выходе, а значит, и на вых. 3 ячейки 16 управления появляется 1, а логический О переходит на вых. 4 в результате наличия на трех входах 114, 105 и 113 элемента ЗИНЕ 100 логических 1. Через диод 102 в
ячейке 16 управления логическим О происходит переключение по входу 110 RS-триг- гера, который фиксирует наличие команды на ход назад. Вместе с логическим 0й на вых. 4 логический О появляется и на вых. 5 в результате наличия на входе 115, соединенным с выходом RS-триггера, и входе 107 элемента 2И-НЕ 96 логических 1. Логический О, появившись на входной шине 72, через диод (72, 61) включает согласующий усилитель 26, который запускает объект 32 управления на ход назад. Диод (72,39), воздействуя логическим О на вх. 4, блокирует вых. 2, вых. 3 и вых. 4 ячейки 16 управления. Логический О, присутствовавший на вых. 4, сменяется на 1. Диод (72. 42) удерживает RS-триггер через вход 110 в переключенном состоянии с целью помехоустойчивости.
Объект 32 управления возвращается в начальное положение, срабатывает датчик 9 начального положения, в результате на вход 116 элемента ЗИ-НЕ 101 приходит логическая 1. На двух других входах 117 и 108 также присутствуют логические 1 и, следовательно, на вых. 6, а значит, и на входной шине 73 появляется логический О.
Диоды (73. 3), (73, 42) и (73, 61) на входной шине 73 возлагают на себя роль диодов (72, 39), (72, 42) и (72, 61) соответственно. Диод (73,41) логическим О воздействуя на вх. 6. блокирует вых. 5 ячейки 16 управления и.на нем, а значит, и на входной шине 72 логический О сменяется на логическую 1.
Таким образом, объект 32 управления согласно циклограмме (фиг. 4) выполнил команду на ход вперед от датчика 9 начального положения до датчика 12 конечного положения и, достигнув датчика 12 конечного положения, выполнил команду на ход назад, т.е. возвратился в начальное положение.
Рассмотрим теперь программную работу ячейки 17 управления, управляющей объектом 33 управления, который включается в работу одновременно с объектом 32 управления согласно циклограмме на (фиг. 4).
При включении в работу ячейки 17 управления логический О появляется на входной шине 75 (датчик 10 начального положения включен), затем после отключения датчика начального положения, когда объект 33 управления покинул зону датчика, логический О появляется на входной ши- нее 76. Диоды (75, 64) и (76,.64) служат для включения через согласующий усилитель 29 объекта 33 управления на ход вперед. Диод (75, 46). (75, 47), (75, 49), (76, 46), (76, 47), (76. 49) играют для ячейки 17 управления ту же роль, что и соответственно диоды (69, 40), (69, 41), (69, 43), (70, 40), (70. 41), (70, 43) для ячейки 16 управления.
Когда объект 33 достигнет датчика 13 конечного положения, логический О появляется на вых. 4 ячейки 17 управления и на входной шине 77. Диод (77, 47) блокирует 5 через вх. 6 вых. 5 ячейки 17 управления, воздействуя логическим О на вход 107 элемента 2И-НЕ 96.
Диод (77, 49) блокирует через вх. 8 вых. 6 ячейки 17 управления, воздействуя логи- 10 ческим 0н на вход 108 элемента ЗИ-НЕ 101. Диод (77, 64) через согласующий усилитель 29 удерживает объект 33 управления в конечном положении.
Объект 33 управления, достигнув датчи- 5 ка 13 конечного положения, остается в этом положении согласно циклограмме на фиг. 4. В этот момент времени вступает в работу ячейка 18. управления, а значит, и объект 34 управления. До этого момента времени 0 на шине 80 присутствовал логический О, который через диоды (80, 51), (80, 52), (80, 53) .и (80, 55) удерживал ячейку управления в исходном состоянии готовности к работе, а через диод (80, 65) объект 34 управления в 5 начальном положении через согласующий усилитель 30.
Через диод (77, 50) в момент прихода объекта 33 в конечное положение логический О подается на вх. 1 ячейки 18 управ- 0 ления, который инвертируется алогическую 1 элементом НЕ 92, ячейка 18 управления вступает в работу, на входной шине 80 появляется логическая 1, а. на шине 81 - логический О.
5 Таким образом, объект 34 управления начинает движение из начального положения в конечное при условии прихода объекта 33 управления в конечное положение (фиг. 4)..
0 Логический О на входной шине 81 присутствует в момент нахождения объекта 34 управления в начальном положении, т.е. когда включен датчик 11 начального положения. Через диод (81, 66) логический О 5 поступает на согласующий усилитель 31, который включает объект 34 управления на ход вперед. Затем логический О появляется на входной шине 82 и через диод (82, 66) продолжает управлять ходом вперед объек- 0 та 34 управления. По приходу объекта 34 управления в конечное положение, т.е. когда включится датчик 14 начального положения, логический О появится на вых. 5 ячейки 18 управления, а значит, и на вход- 5 ной шине 84. Диод (84, 65) включит через согласующий усилитель 30 объект 34 управления на ход назад. В результате объект 34 управления возвращается в начальное положение, срабатывает датчик 11 начального положения и логический О появляется на
вых. 6 ячейки 18 управления, значит, и на входной шине 85. Логический О будет присутствовать на вых. 5 и вых. 6, так как вых. 5 не заблокирован через вх. 6 ячейки 17 управления.
Ячейка 18 управления запрограммирована аналогично ячейке 16 управления. Диоды (81, 52), (81, 53), (81, 55), (82, 52), (82, 53), (82, 55), (84, 51), (84, 54), (85, 51) и (85. 54) несут те же функции для ячейки 18 управления, что и соответственно диоды (69,40), (69, 41), (69, 43), (70, 40), (70, 41), (70, 43), (72, 39), (72, 42), (73, 39) и (73, 42) для ячейки 16 управления. Логический О на входной шине 85 через диоды (85, 45) и (85, 48) воздействует соответственно на вх. 4 и вх. 7 ячейки 17 управления. На вых. 4, а значит, и на входной шине 77 появляется логическая 1, а логический 0й переходит на шину 78. Через диод (78, 63) включается усилитель 28 и объект 33 управления выполняет команду на ход назад.
- Диоды (85,48) и (79,48) служат для удержания RS-триггера ячейки 17 управления в переключенном состоянии с целью ее помехоустойчивости и дублируют друг друга. Диоды (78. 50), (79, 50) несут те же функции, что и диод (77, 50), т.е. блокируют вых. 1 через вх. 1 ячейки 18 управления и поддерживают ее в рабочем состоянии. Диоды (79, 45), (79, 47) и (79, 48) несут те же функции для ячейки 17 управления, что и соответственно диоды (73, 39), (73. 41) и (73, 42) для ячейки 16 управления.
Таким образом осуществлена программная организация одного цикла работы объ- ектов 32-34 управления согласно циклограмме на (фиг. 4), при этом объект 32 управления работает независимо от объектов 33 и 34 управления, т.е. его работа логически не взаимосвязана с объектами 33 и 34 управления, работа же объекта 33 управления логически взаимосвязана с работой объекта 34 управления.
Теперь необходимо организовать бесконечное повторение цикла, т.е. работу объектов 32-34 управления в автоматическом режиме. Такая логическая взаимосвязь реализуется с помощью элемента НЕ 19.
При работе ячейки 16 управления логический О последовательно перемещается по входным шинам 69-72 и через диоды (69, 56), (71, 56), (70. 56) и (72, 56) подается на вход элемента НЕ 19.
При работе ячейки 17 управления логический О перемещается последовательно по входным шинам 75-78 и через диоды (75, 56), (76.56), (77,56) и (78,56) также подается на вход элемента НЕ 19. В результате при
наличии О на какой-либо из этих шин на выходе НЕ 19 будет логическая 1. И лишь по приходу логического О на входную шину 73 и 79 и появлении логической 1 на
входных шинах 69-72 и 75-78 на выходе элемента НЕ 19, а значит, и на входной шине 86 появится логический О.
Таким образом программно организована логическая функция 2И для сигналов с
0 входных шин 73 и 79, т.е. сигнал в виде логического О появится на входной шине 86 только при условии наличия двух сигналов в виде логического,О на шинах 73 и 79. Появившийся логический О на вход5 ной шине 8.6 сигнализирует о возвращении объектов 32 и 33 управления в начальное положение и разрешает переход на новый цикл. Для этого через диод (86,58) с входной шины 86 логический О подается на вход
0 одновибратора 21 через переключающий элемент 6. В результате на выходе одновибратора 21. а значит, и на входной шине 88 появляется импульс в виде кратковременного логического который через диоды
5 (88, 39), (88, 40), (88, 41), (88, 43), (88, 45), (88, 46), (88, 47), (88, 49), (88, 51), (88, 52), (88, 53) и (S8..55) вернет ячейки управления в исходное состояние готовности к работе, а диоды (88, 61), (88, 63) и (88, 65) соответственно
0 через согласующие усилители 26, 28 и 30 будут удерживать объекты 32-34 управления в начальном положении на время действия импульса с одновибратора 21.
После появления логической 1 на ши5 не 88 логический О появляется на входной шине 69 и на шине 75, ячейки 16 и 17 управления снова вступают в работу, начинается следующий цикл.
Объекты182-34 управления будут цикли0 чески работать в автоматическом режиме.
Если разомкнуть переключающий элемент 6 в блоке 2 общего управления, который отключит вход одновибратора 21 от выходной шины 58, управляющей одновиб5 ратором 21, то, отработав цикл, объекты 32- 34 управления останутся в начальном положении. При нажатии на кнопку 4, его второй контакт пропустит логический О на вход однЗдибфаторэ 21с выходной шины 58
0 и сформированный однрвибратором 21 импульс логического О через входную шину 88 сбросит ячейки 16-18 управления в исходное состояние готовности к работе и по истечении прохождения импульса начнется
5 следующий цикл работы.
При нажатии на кнопку 5 Стоп реле 7 отключится, контакты 8 его переключаются и на входную шину 67 подается логический О, который сбрасывает в исходное состояние ячейки 16-18 управления и дает команду на установление объектов 32-34 управления в начальное положение.
С помощью переключателя 6 и кнопки 4 Пуск можно управлять двумя режимами устройства программного управления - автоматическим режимом и режимом цикла, а кнопкой 5 Стоп осуществляется оперативное прерывание работы обьектов 32-34 управления с установкой их в начальное положение.
Если теперь диодную матрицу, изображенную на фиг. 2, заменить на диодную матрицу с новой комбинацией диодов, изображенной на фиг. 5, от объекты 32-34 управления будут работать по другой программе согласно циклограмме на фиг. 6.
После включения реле 7 в работу вступают ячейки 16 и 18 управления. Ячейка 17 управления остается в исходном состоянии. на входной шине 74 будет логический О, который через диоды (74,45). (74, 46), (74, 47) и (74, 49) воздействует на вх. 4, вх. 5, вх. 6 и вх. 8 ячейки 17 управления, в результате на выходах ячейки 17 управления (вых. 2...вых. 6) присутствуют логические 1 - ячейки 17 управления находтися в исходном состоянии готовности к работе.
Логический О появляется на вых. 2 ячеек 16 и 18 управления. Объекты 32 и 34 управления начинают выполнять команду на ход вперед. Логический О последовательно появляется на входных шинах 69-71 и на шинах 81-83 в соответствии с нахождением объектов 32 и 34 управления в начальном положении (датчики 9 и 11 начального положения включены .датчики 12 и 14 конечного положения отключены), в промежуточном положении между датчиками начального и конечного положения (датчики 9 и11 начального положения и датчики 12 и 14 конечного положения отключены) и в конечном положении (датчики 9 и 11 начального положения отключены, а датчики 12 и 14 конечного положения включены).
Для организации хода вперед объекта 32 управления служат диоды (69,40)„(69,41), (69, 43), (70, 40), (70, 41) и (70, 43),а для организации хода вперед объекта 34 управления служат диоды (81, 52), (81, 53). (81, 55), (82, 52), (82, 53) и (82, 55).
Диоды.(71, 41) и (71, 43) через вх. 6 и вх. 8 блокируют вых. 5 и вых. 6 ячейки 16 управления, служащих для организации хода назад объекта 32 управления, и поэтому на этих выходах присутствуют логические 1. Диоды (83, 53) и (83, 55) блокируют вых. 5 и вых. 6 ячейки 18 управления.
Следовательно, достигнув конечного положения, объекты 32 и 34 управления остаются в этом положении.
Теперь согласно циклограмме на фиг. 6 должен начать ход вперед объект 33 управления и, значит, вступит в работу ячейка 17 управления при условии, что объекты 32 и 34 5 управления достигли конечного положения, т.е. при наличии логического О на шинах 71 и 83.
Эта логическая взаимосвязь реализуется с помощью элемента НЕ 19 и диодов (69, 0 56), (70, 56), (81, 56) и (82, 56). Пока объекты 32 и 34 управления не достигли конечного положения логические О с вых. 2 и вых. 3 ячейки 16 управления и с вых. 2 и вых. 3 ячейки 18 управления воздействуют на вход 5 элемента НЕ 19, следовательно, на входной шине 86, которая подсоединена через диод (86, 44) к вх. 1 ячейки 17 управления присутствует логическая 1 и на шине 74 присутствует логический О, который удерживает 0 ячейку 17 управления в исходном состоянии.
Когда логический О на входных шинах 69, 70, 81 и 82 сменяется на логическую 1, на входе элемента НЕ 19 будет логическая 5 1, а на выходе - логический О, который через диод (86,44) запускает в работу ячейку 17 управления. Логический О появляется на вых. 2 ячейки 17 управления, а значит, и на шине 75, начинает выполняться команда 0 на ход вперед объектом 33. Логический О переходит с шины 75 на шину 76 при выходе объекта 33 управления из начального положения (датчик 10 начального положения и датчик 13 конечного положения отключены), 5 затем логический О появляется на шине 78 (включен датчик 13 конечного положения). При этом логический О кратковременно появляется и на входной шине 77, т.е. на вых. 4 ячейки 17 управления, но после пере- 0 ключения RS-триггера ячейки 17 управления логический О появляется на шине 78, который через диод (78, 45) блокирует вых. 4 и на нем появляется логическая 1.
Затем логический О, как сигнал о вы- 5 полненной объектом 33 управления работе, появляется на шине 79.
Согласно циклограмме на фиг. 6 объект 33 управления выполнил команду на ход вперед, дошел до конечного положения и 0 вернулся в начальное.
При этом для организации команды на
ход вперед служат диоды (75. 46), (75, 47),
(75, 49). (76. 46), (76, 47) и (76, 49) и команды
на ход назад диоды (78, 45), (78, 48). (79, 45),
5 (79, 48) и (79, 47).
Логический О через диоды (79, 39) и (79, 42) воздействует на вх. 2 и вх. 5 ячейки 16 управления, в результате логический О переходит с входной шины 71 на шину 72, начинается выполнение команды на ход назад объектом 32 с помощью диодов (72, 39), (72, 42), (73, 39), (73, 41) и (73. 42).
Логический О через диоды (79, 51) и (79, 54) воздействует также на вх. 4 и вх. 7 ячейки 18 управления, з результате логический О переходит с входной шины 83 на шину 84, начинается выполнение команды на ход назад объектом 34 управления с помощью диодов (84, 51), (84, 54), (85, 51), (85, 53) и (85, 54).
Теперь согласно циклограмме на фиг. 6 при возвращении объектов 32 и 34 управления в начальное положение должна произойти задержка времени. Значит, необходимо включить формирователь временной задержки только при наличии логических О на шине 73 и 85. Эта логическая функция реализуется с помощью диодов (69, 57), (70, 57), (71, 57), (72, 57), (81, 57), (82, 57), (83. 57 и (84, 57) и элемента НЕ 20.
Перечисленные диоды подключают логический О к входу элемента НЕ 20 и на его выходе, который управляет формирователь 22 временной задержки через диод (87, 59), будет логическая 1. И лишь при появлении на входных шинах 69-72 и 81-84 логической 1 на в ыходе НЕ 20, а значит, на входной шине 87 появится логический О, который через диод (87, 59) включит формирователь 22 временной задержки.
На этом такте циклограммы устройство программного управления обеспечивает работу по временному принципу.
По истечении времени, задающего формирователем 22 временной задержки, на его выходе, соединенном с шиной 89, появляется логический О, который через диод (89, 60) включает технологическое оборудование 23, а через диод (89, 44) вновь включает в работу ячейку 17 управления.
Для того, чтобы снова запустить в работу ячейку 17 управления, необходимо сначала привести ее в исходное состояние готовности и затем дать команду на включение ее в работу, т.е. чтобы на шине 74 сначала появился логический О, а затем для включения в работу ячейки 17 управления - логическая 1й.
Через диоды (73, 56) или (85, 56) (программно реализуется логическая функция ИЛИ), которые дублируют друг друга, логический 0я поступает на вход элемента НЕ 19, в результате логическая 1 появляется на шине 86, управляющей через диод (86,44) вх. 1 ячейки 17 управления. На входной шине 74 появляется логический О, который устанавливает ячейку 17 управления в исходное состояние готовности к работе.
Когда же логический О появляется на входной шине 89 (выход формирователя
временной задержки), то через диод (89. 44) логический О приходит на вх. 1 ячейки 17 управления и на ее вых. 1 появляется логическая 1 .ячейка 17управления вновь встулает в работу. Логический О с шины 74 переходит на шину 75.
После выполнения технологическим оборудованием 23 своих функций оно выдает логический О на входную шину 90.
0 Теперь согласно циклограмме на фиг. 6 после того, как объект 33 управления, выполнив команду на ход впереди и ход назад, вернулся в начальное положение, и после того, как технологическое оборудование 23
5 выполнило свои функции, цикл заканчива- ния и необходимо перейти на следующий цикл (т.е. при условии наличия логических О на шине 79 и шине 90).
Эта логическая взаимосвязь реализует0 ся с помощью элемента НЕ 92 ячейки 16 управления и элемента НЕ 92 ячейки 18 управления, которые не используются в данном случае в программном управлении этих ячеек.
5 При появлении логического О на входной шине 90, который через диод (90, 38) воздействует на вх. 1 ячейки 16 управления, на вых. 1 ячейки 16 управления появится логическая 1, а значит, логическая 1 по0 явится и на шине 68, которая через диод (68, 50) воздействует на вх. 1 ячейки 18 управления. На вх. 1 ячейки 18 управления также воздействуют диоды (75, 57), (76, 50), (77, 50) и 978, 50) и при последовательном прохож5 дении логического О от входной шины 75 к шине 79 логический О остается на шине 79. а на шинах 75-78 будет логическая 1.
В результате на вых. 1 ячейки 18 управления, а значит, и на шине 80 появляется
0 логический О, являющийся цифровым сигналом о выполненной работе технологическим оборудованием 23 и объектом 33 управления, который через диод (80, 58) включает одновибратор 22.
5 Одновибратор 22 сформированным импульсом в виде логического О через диоды на шине 88 приведет все ячейки 16-18 управления в исходное состояние готовности к работе, и цикл повторяется заново.
0 В некоторые моменты выполнения программы возможны такие взаимодействия объектов управления и технологического оборудования, которые в случае аварийной работы оборудования могут
5 привести к поломке объектов управления и технологического оборудования, например, самоход пресса, когда объект управления находится в зоне штампа.
Аварийный датчик 15, являющийся датчиком технологического оборудования 23,
соединяется с входной шиной 91 и имеет таким образом прямой доступ к памяти в виде диодной матрицы 24 (фиг. 5). °
Во время работы технологического оборудования 23 аварийный датчик 15 включается и логический О поступает на входную шину 91, который через диоды (91, 61) и (91, 65) непосредственно управляет через согласующие усилители 26 и 30 безаварийным положением объектов 32 и 34 управления независимо от их ячеек управления, предупреждая тем самым аварийную ситуацию.
Итак, рассмотрены два примера программного управления объектами управления по двум разным циклограммам (фиг. 4 и фиг. 6),
Можно также организовать программную работу .объектов управления по двум независимым программам согласно циклограммам на фиг. 4 и фиг. 6.
Для этого в устройство вводят еще три ячейки/управления (т.е. всего устройства программного управления будет содержать шесть ячеек управления), необходимое число элементов НЕ для организации логических взаимосвязей, формирователей временных интервалов, а диодные матрицы на фиг. 2 и на фиг. 5 объединяются в одну матрицу, т.е. с увеличением числа объектов управления есть возможность наращивать устройство программного управления.
Таким образом, устройство для программного управления позволяет управлять объектами управления по сложной программе, реализовывая при этом логические функции, взаимосвязывающие работу объектов управления согласно заданной циклограмме.
Программирование основывается на знании логических законов булевой алгебры и заключается в программировании диодной матрицы, являющейся единственным программоносителем, программная работа объектов управления зависит только от комбинационного набора диодов в диодной матрице, что упрощает процесс программирования и перепрограммирования.
Каждая ячейка управления, являясь цифровым устройством, позволяет самостоятельно вместе с диодной матрицей управ- лять двухтактной работой объекта управления (ходом вперед, ходом назад), что расширяет функциональные возможности устройства программного управления.
Ячейка управления позволяет получать цифровую информацию не только о нахождении объекта управления в начальном и конечном положении, но и в промежуточном, когда двухпозиционный объект управления совершает движения из начального
положения в конечное и из конечного в начальное положение, и цифровой сигнал о возвращении объекта управления в начальное положение, что позволяет получать гиб- 5 кость в программировании и расширяет функциональные возможности устройства программного управления.
Устройство программного управления обладает помехоустойчивостью и надежно0 стью работы, что рёделяется способом программирования и структурой устройства, представляющей собой комбинационную схему, включающую в себя ячейки управления и диодную матрицу.
.5 Надежность обеспечивается также тем, что устройство программного управления состоит из одинаковых, относительно простых ячеек управления, что дает также возможность легко наращивать устройство
0 программного управления при увеличении числа объектов управления.
Устройство позволяет при разветвлении цикла на параллельные участки работы вновь соединяться в один цикл с контролем
5 от датчиков положения, т.е. после того, как все параллельные участки работы цикла выполнены и объекты управления занимают определяемые циклограммой положения, фиксируемые датчиками положения.
0При программировании устройства не
все элементы НЕ (в примере конкретного исполнения это элемент НЕ 92 ячейки управления на фиг. 3) ячейки управления оказываются задействованными и имеется
5 возможность использовать их при организации логических функций, взаимосвязывающих через ячейки управления работу объектов управления согласно заданной циклограмме, что уменьшает число вводи0 мых в устройство элементов НЕ.
Устройство программного управления позволяет вводить при необходимости вспомогательные устройства, что расширяет его функциональные возможности.
5 При вводе формирователей времен-. ных интервалов можно реализовать работу устройства программного управления по временному принципу; включать независимо работающее технологическое обо0 рудование, причем если технологическое оборудование взаимодействует с объектами управления, то, вводя аварийные датчики, .имеется возможность программно исключать аварийную ситуацию и произ5 водить запуск в работу объектов только при нахождении всех объектов управления в начальном положении, что исключает аварийную ситуацию.
Таким образом, предлагаемое техническое решение обеспечивает повышение надежности, расширение функциональных возможностей и упрощение программирования.
Формула изобретения 1. Устройство для программного управления объектами, содержащее датчики положения объектов, ячейки управления с элементом памяти, блок программ, выполненный в виде диодной матрицы, входные шины которой являются входами блока, а выходные шины матрицы являются выходами блока, причем число входных шин равно числу ячеек управления, а выходных - числу входов объектов управления, а также блок согласующих усилителей, подключенный выходами к объектам управления, а входами
-к соответствующим выходам диодной матрицы, отличающееся тем, что, с целью расширения функциональных возможностей путем программной реализации любых логических функций, взаимосвязывающих работу объектов управления согласно заданной циклограмме, возможности работы по временному принципу, управления двухтактной работой объектов управления, возможности ввода вспомогательных устройств, а также повышения надежности и упрощения программирования устройства, введены блок управления режимами и формирователь временных интервалов, в диодную матрицу введены дополнительные входные и выходные шины, каждая ячейка управления содержит три элемента НЕ, два элемента 2И-НЕ, три элемента ЗИ-НЕ и диод, вход первого элемента НЕ является первым входом ячейки управления, а выход
-первым выходом ячейки управления, вход второго элемента НЕ соединен с вторым входом ячейки и с первым входом первого
. элемента 2И-НЕ, вход третьего элемента НЕ соединен с третьим входом ячейки и с первым входом первого элемента ЗИ-НЕ, выход второго элемента НЕ соединен с первым входом второго элемента ЗИ-НЕ, выход третьего элемента НЕ соединен с вторым входом второго элемента ЗИ-НЕ, второй вход первого элемента 2И-НЕ, соединенный с вторым входом первого элемента ЗИНЕ и с третьим входом второго элемента ЗИ-НЕ, является четвертым входом ячейки управления, выходы первого элемента 2И- Н Е, соединенного с третьим входом первого элемента ЗИ-НЁ, второго элемента ЗИ-НЕ и первого элемента ЗИ-НЕ являются соответственно вторым, третьим и четвертым выходами ячейки управления, выход первого элемента ЗИ-НЕ через диод соединен с установочным входом элемента памяти, сбросовый вход элемента памяти является пятым входом ячейки управления, а выход
элемента памяти соединен с первым входом третьего элемента ЗИ-НЕ и с первым входом второго элемента 2И-НЕ, второй вход третьего элемента ЗИ-НЕ соединен с первым входом первого элемента 2И-НЕ, второй вход второго элемента 2И-НЕ является шестым входом ячейки управления, а установочный вход элемента памяти является седьмым входом ячейки управления, выход
0 второго элемента 2И-НЕ и выход третьего элемента ЗИ-НЕ являются соответственно пятым и шестым выходами ячейки управления, а третий вход третьего элемента ЗИ-Н Е является восьмым входом ячейки управле5 ния, каждая из ячеек управления первым и с четвертого по восьмой входами соединена с соответствующими выходными шинами, а выходами - с соответствующими входными шинами диодной матрицы программного
0 блока, второй и третий входы каждой ячейки управления соединены с выходами соответствующих датчиков начального и конечного положения, входы которых подключены к шине напряжения низкого уровня, с кото5 рой входом напряжения низкого уровня соединен блок управления режимами, группа входов которого подключена к выходам датчиков начального положения, установочный выход блока управления режимами соеди0 нен с соответствующей входной шиной диодной матрицы, вход цикличности блока управления режимами подключен к соответствующей выходной шине диодной матрицы, выход цикличности блока управления
5 режимами через формирователь временных интервалов соединен с соответствующей входной шиной диодной матрицы, шина напряжения низкого уровня и незадействованные входы логических элементов
0 подключены к соответствующим шинам питания.
2, Устройство по п. 1, о т л и ч а ю щ е е- с я тем, что блок управления режимами содержит элемент И, элемент памяти типа ре5 ле с переключающим контактом, два элемента управления и переключающий элемент, причем группа входов элемента И является группой входов блока, выход элемента И соединен с первым выводом обмот0 ки реле, второй вывод которого через размыкающий контакт первого элемента управления подключен к первому выводу первого замыкающего контакта второго элемента управления и к замыкающему вы5 воду переключающего контакта реле, размыкающий вывод этого контакта является установочным выходом блока, а общий вывод переключающего контакта элемента памяти соединен с вторым выводом первого замыкающего контакта второго элемента управления и является входом напряжения низкого уровня блока, первый вывод второго замыкающего контакта второгЪ элемента управления является выходом цикличности блока и через размыкающий контакт переключающего элемента подключен к второму выводу второго замыкающего контакта второго элемента управления и к входу цикличности блока.
3.Устройство по п. 1, отл ича ющееся тем, что, с целью расширения функциональных возможностей, в устройство введено технологическое оборудование, входами и выходами подключённое соответственно к дополнительным выходным и входным ши- нам диодной матрицы.
4.Устройство по п. 1, о т л и ч а ю щ е е- с я тем, что, с целью организации работы по временному принципу, в устройство введена группа формирователей временных ин-
тервалов, подключенных входами и выходами соответственно к дополнительным выходным и входным шинам диодной матрицы.
5.Устройство по п. 1, о т л и ч а ю щ е е- с я тем, что, с целью исключения аварийной ситуации, в устройство введены аварийные датчики, подключенные к дополнительным входным шинам.
6.Устройство по п. 1. о т л и ч а ю- щ е е с я тем, что, с целью организации логической взаимосвязи между ячейками управления, а значит, и между объектами управления введена группа элементов НЕ, число которых соответствует числу программно организуемых взаимосвязей и входы которых соединены с выходными, а выходы с входными шинами диодной матрицы программного блока.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для предварительной обработки изображений | 1989 |
|
SU1654849A1 |
| Вибрационный источник сейсмических сигналов | 1985 |
|
SU1277034A1 |
| Термографический регистратор | 1984 |
|
SU1174288A1 |
| Устройство для управления шаговым двигателем с дроблением шага | 1983 |
|
SU1149367A2 |
| Устройство сопровождения и адресования объектов на конвейере | 1990 |
|
SU1813687A1 |
| Функциональный генератор напряжения ступенчатой формы | 1983 |
|
SU1124337A1 |
| Устройство для управления @ - фазным шаговым двигателем | 1984 |
|
SU1265964A1 |
| Дешифратор | 1982 |
|
SU1051707A1 |
| Устройство для формирования гистограммы изображения | 1990 |
|
SU1826081A1 |
| Ключ переменного тока | 1982 |
|
SU1066035A1 |

Изобретение относится к автоматике и может быть использовано в системах программного управления двухпозиционными обьектами- по заданной циклограмме. Целью изобретения является расширение функциональных возможностей, повыше ние надежности и упрощение программирования устройства. Цель достигается тем, что в устройство программного управления обьектами, содержащее датчики положения объектов, ячейки управления с элементом памяти, блок программ в виде диодной матрицы, в которой число горизонтальных шин соответствует числу ячеек управления, а число вертикальных шин - числу объектов управления, блок согласующих усилителей с выходами для подключения к объектам управления, блок согласующих усилителей с выходами для подключения к объектам управления через диоды в диодной матрице, в диодную матрицу введены дополнительные вертикальные и горизонтальные шины, блок общего управления, элементы НЕ, формирователи временных интервалов и, кроме того, ячейки управления. Каждая из ячеек управления в совокупности с диодной матрицей способна программно управлять двухпозиционным объектом управления, а входы ее соединены с вертикальными шинами диодной матрицы, к которым через диоды подается управляющая цифровая информация с горизонтальных шин диодной матрицы, соединенной с выходами ячейки управления, объединяется при управлении n-м количеством объектов управления в группу ячеек управления с помощью общей диодной матрицы, при этом диодная матрица является единственным программоносителем, производит посредством диодов не только включение объектов управления через согласующие усилители, но и организует управление ячейками управления и логическую взаимосвязь .между ячейками управления, выдающими цифровую информацию, подчиненную логической задаче, определяемой циклограммой работы объектов управления. 5 з.п.ф-лы, 10 ил. (Л С Ч 00 а 00 ел
16
Вых.
Вых. 2 Вых. 3 Вых. tt Вых. 5 Вых. 6
tlS S 4
ЗДЗд
ТТтТТТ
38 39 (to It 42 J/3
Am Л Ж Л Л.
W «545479849
ТГГГТГ 4f 505t5253SlfSSJ
87 60 -
91
Риг.1
25
fff
Jf
J5 76 J7 .78 S9
62
63
64
9849
80 Sf
вг
83 89 8S
S5
66
22
23
J
У
Фиъ.2
Ыод Вход2 ВхсЭЗ ЫоЪЧ 6/035 &035 Фиг.З
J/
Фиг. 5
,
I ;
Л
f/t.ff
I
Vrstr
J
l lh:uao« %
|H
I
I |
riy
г:
/V.
fV
w
9ty
9 W.
ГУ
ty 14.
98181Z.I
| Устройство для программного управления объектами | 1985 |
|
SU1287107A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Пневматический водоподъемный аппарат-двигатель | 1917 |
|
SU1986A1 |
| Устройство для программного управления объектами | 1985 |
|
SU1303997A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
