Изобретение относится к электротехнике и может быть использовано для дистанционного включения, отключения и переключения магнитных пускателей, контакторов, реле и других электроаппаратов.
Цель изобретения - повышение надежности, упрощение устройства и управления, расширение эксплуатационных возможностей.
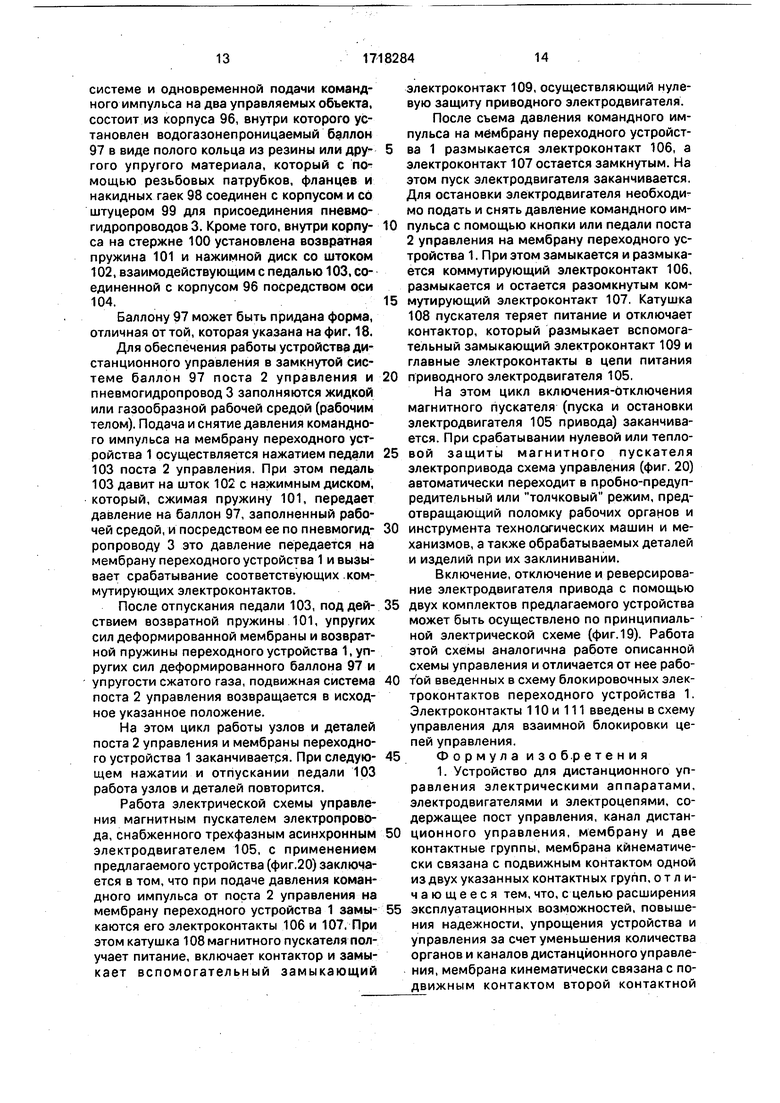
На фиг. 1 изображена структурная схема устройства для дистанционного пневмогид- роуправления пускателем электродвигателя привода с переходным устройством, установленным между кнопочно-клапанным постом управления и магнитным пускателем, с питанием сжатым газом от пневмосети и заполненного сжатым газом баллона штриховой линией показана установка переходного устройства в корпусе пускателя); на фиг.2 -тоже, с педальным управлением и без переключения режима управления для
перехода на замкнутый режим; на фиг.З - структурная схема управления одновременно двумя электродвигателями или другими электроприемниками в замкнутом режиме, где электроприемник, указанный слева, включается и отключается электромагнитным аппаратом с помощью педали поста управления и переходного устройства, встроенного в корпус аппарата, а правый электроприемник включается той же педалью поста управления, но непосредственно с помощью переходного устройства, установленного между ним и постом управления; на фиг.4 - схема управления электроприемником с помощью переходного устройства и кнопки поста управления в замкнутой системе; на фиг.5 - переходное устройство, предназначенное для встройки в корпус электроаппаратов, приборов и в ниши, осевой разрез; на фиг.6 - то же, вид со стороны ввода пневмогидропривода; на
СО
го
00
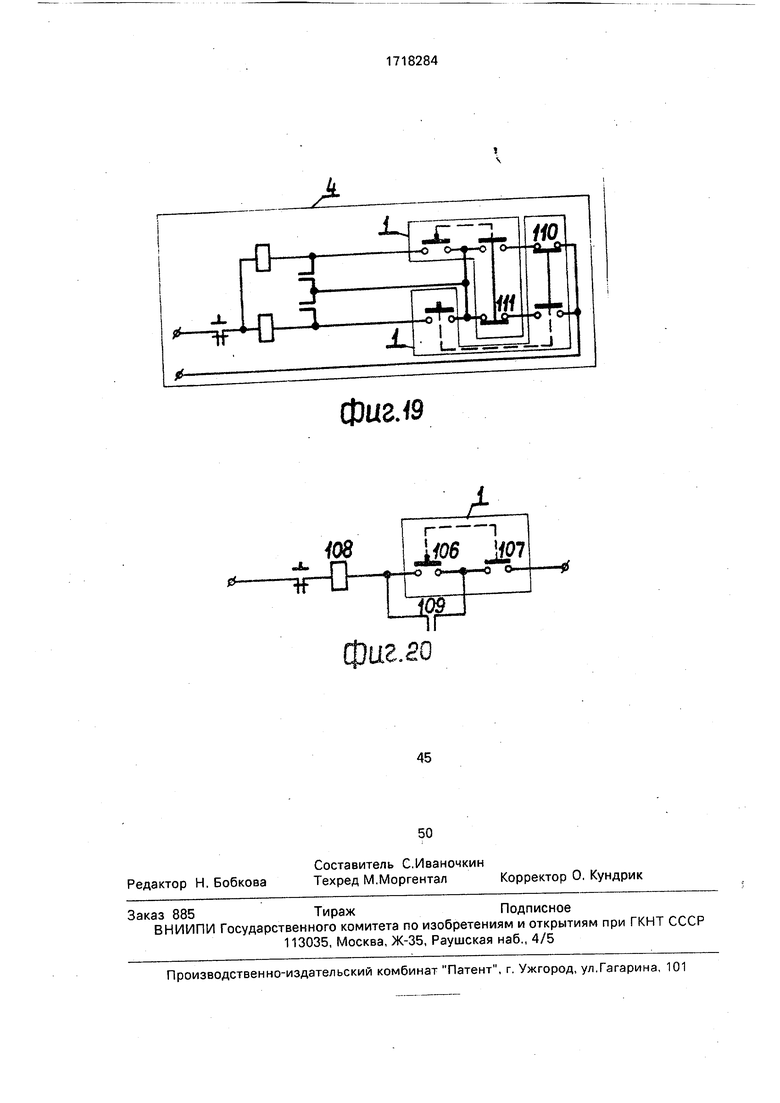
фиг.7 - переходное устройство, предназначенное для установки в линию дистанционногоуправлениямеждуэлектроприемником или электромагнитным аппаратом и постом управления; на фиг.8 - то же, общий вид; на фиг.9 - стенка корпуса переходного устройства для установки внутри корпуса электроаппаратов, в нишах и на опорных поверхностях, на котором показан ножевой коммутирующий электроконтакт в разомкнутом положении, общий виде вырывом; на фиг,10 -тоже, но коммутирующий электроконтакт показан в замкнутом положении; на фиг.11 - разрез А-А на фиг.9; на фиг. 12 - то же, вид сверху со стороны пневмогидропривода; на фиг.13 - переключающая вилка и седло для установки коромысла с коммутирующим электроконтактом; на фиг. 14 - вариант конструктивного оформления переходного устройства в герметичном исполнении при использовании его под водой для увеличения дистанции управления и в качестве пускателя (штрихпунктирной линией изображены сальники под вводный и выводной кабель или изоляционный герметический шланг); на фиг.15 - разрез Б-Б на фиг.14; на фиг.16 - разрез В-В на фиг.15; на фиг.17 - кнопоч- но-клапанный пост пневмогидроуправле- ния с переключающим трехходовым краном, предназначенным для переключения режима управления, осевой разрез; на фиг.18 - педальный вариант конструктивного оформления поста управления с кольцевым резиновым баллоном для управления по замкнутой схеме; на фиг. 19 - электросхема управления реверсивным магнитным пускателем с установкой в его корпусе двух переходных устройств (электроконтакты обведены тонкой линией); на фиг.20 - электри- ческая схема управления простым магнитным пускателем электропривода с нулевой защитой приводного двигателя от самозапуска (тонкой линией обведены электроконтакты переходного устройства).
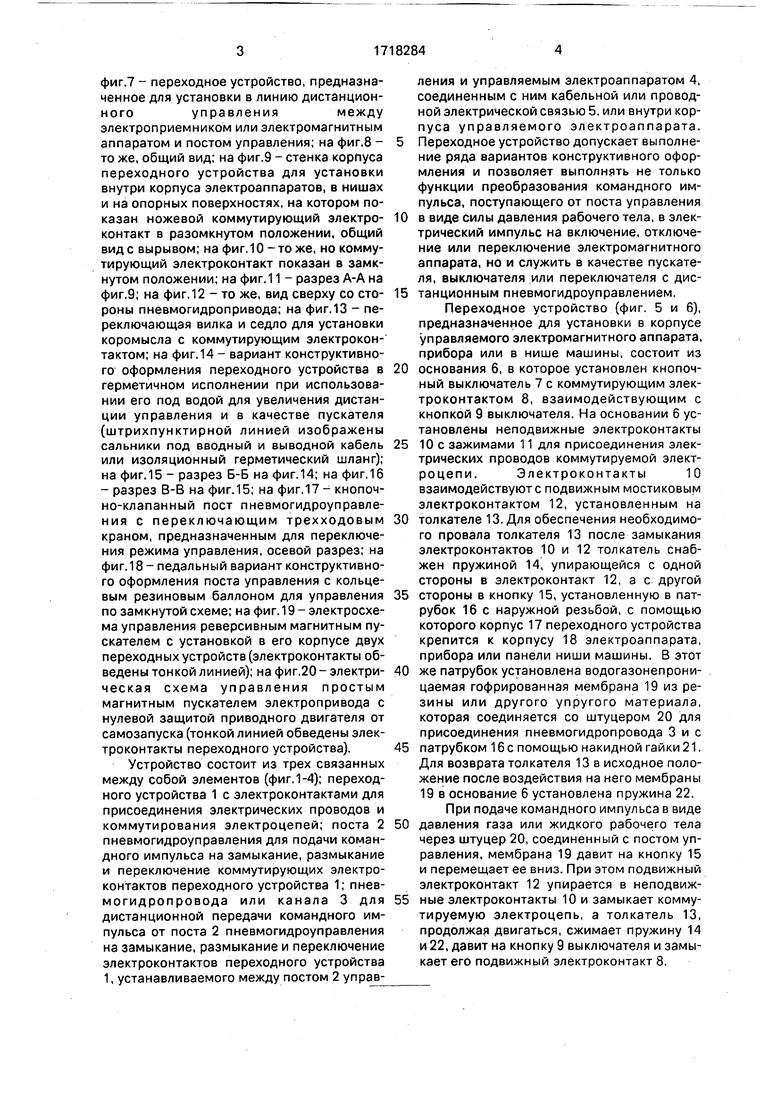
Устройство состоит из трех связанных между собой элементов (фиг. 1-4); переходного устройства 1 с электроконтактами для присоединения электрических проводов и коммутирования электроцепей; поста 2 пневмогидроуправления для подачи командного импульса на замыкание, размыкание и переключение коммутирующих электроконтактов переходного устройства 1; пнев- могидропровода или канала 3 для дистанционной передачи командного импульса от поста 2 пневмогидроуправления на замыкание, размыкание и переключение электроконтактов переходного устройства 1, устанавливаемого между постом 2 управления и управляемым электроаппаратом 4, соединенным с ним кабельной или проводной электрической связью 5, или внутри кор- пуса управляемого электроаппарата.
Переходное устройство допускает выполнение ряда вариантов конструктивного оформления и позволяет выполнять не только функции преобразования командного импульса, поступающего от поста управления
в виде силы давления рабочего тела, в электрический импульс на включение, отключение или переключение электромагнитного аппарата, но и служить в качестве пускателя, выключателя или переключателя с дистанционным пневмогидроуправлением.
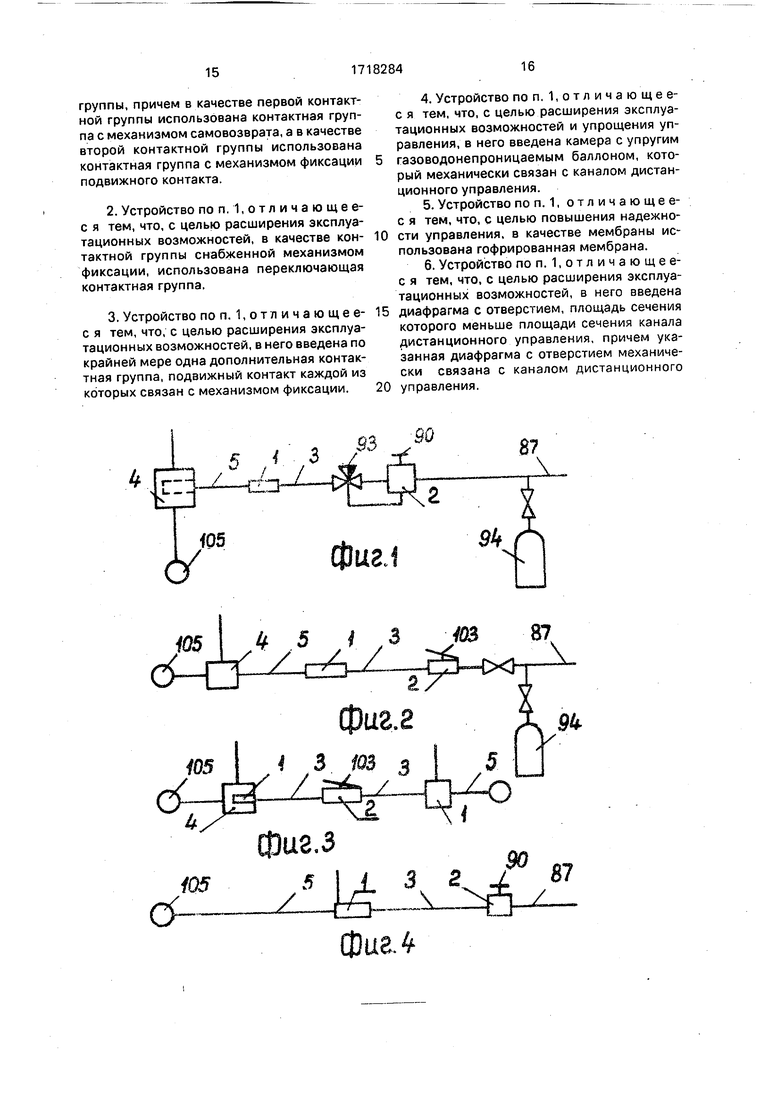
Переходное устройство (фиг. 5 и 6), предназначенное для установки в корпусе управляемого электромагнитного аппарата, прибора или в нише машины, состоит из
основания 6, в которое установлен кнопочный выключатель 7 с коммутирующим электроконтактом 8, взаимодействующим с кнопкой 9 выключателя. На основании 6 установлены неподвижные электроконтакты
10с зажимами 11 для присоединения электрических проводов коммутируемой электроцепи.Электроконтакты10 взаимодействуют с подвижным мостиковым электроконтактом 12, установленным на
толкателе 13. Для обеспечения необходимого провала толкателя 13 после замыкания электроконтактов 10 и 12 толкатель снабжен пружиной 14, упирающейся с одной стороны в электроконтакт 12, а с другой
стороны в кнопку 15, установленную в патрубок 16 с наружной резьбой, с помощью которого корпус 17 переходного устройства крепится к корпусу 18 электроаппарата, прибора или панели ниши машины. В этот
же патрубок установлена водогазонепрони- цаемая гофрированная мембрана 19 из резины или другого упругого материала, которая соединяется со штуцером 20 для присоединения пневмогидропровода 3 и с
патрубком 16 с помощью накидной гайки 21. Для возврата толкателя 13 в исходное положение после воздействия на него мембраны 19 в основание 6 установлена пружина 22. При подаче командного импульса в виде
давления газа или жидкого рабочего тела через штуцер 20, соединенный с постом управления, мембрана 19 давит на кнопку 15 и перемещает ее вниз. При этом подвижный электроконтакт 12 упирается в неподвижные злектроконтакты 10 и замыкает коммутируемую электроцепь, а толкатель 13, продолжая двигаться, сжимает пружину 14 и 22, давит на кнопку 9 выключателя и замыкает его подвижный электроконтакт 8.
После снятия командного импульса давления рабочего тела (рабочей среды) подвижная система переходного устройства под действием пружин 14 и 22 и упругих сил мембраны 19 возвращается в исходное положение. При этом размыкаются электроконтакты 10 и 12, а электроконтакт 8 остается замкнутым.
При следующей подаче командного импульса давления на мембрану 19 работа узлов и деталей устройства происходит аналогично описанному. При этом замыкаются электроконтакты 10 и 12 и размыкается контакт 8. После прекращения командного импульса давления рабочей среды, воздействующей на мембрану 19, подвижная система устройства возвращается в исходное указанное положение. При этом размыкаются электрокснтакты 10 и 12 с самовозвратом, а электроконтакт 8 остается разомкнутым.
На этом цикл работы узлов, деталей и коммутирующих электрокснтактов переходного устройства згжанчиьается.
При следующей подаче и снятии давления командного импульса рабочего тела работа узлов, деталей и коммутирующих электроконтактов повторяется так, как описано.
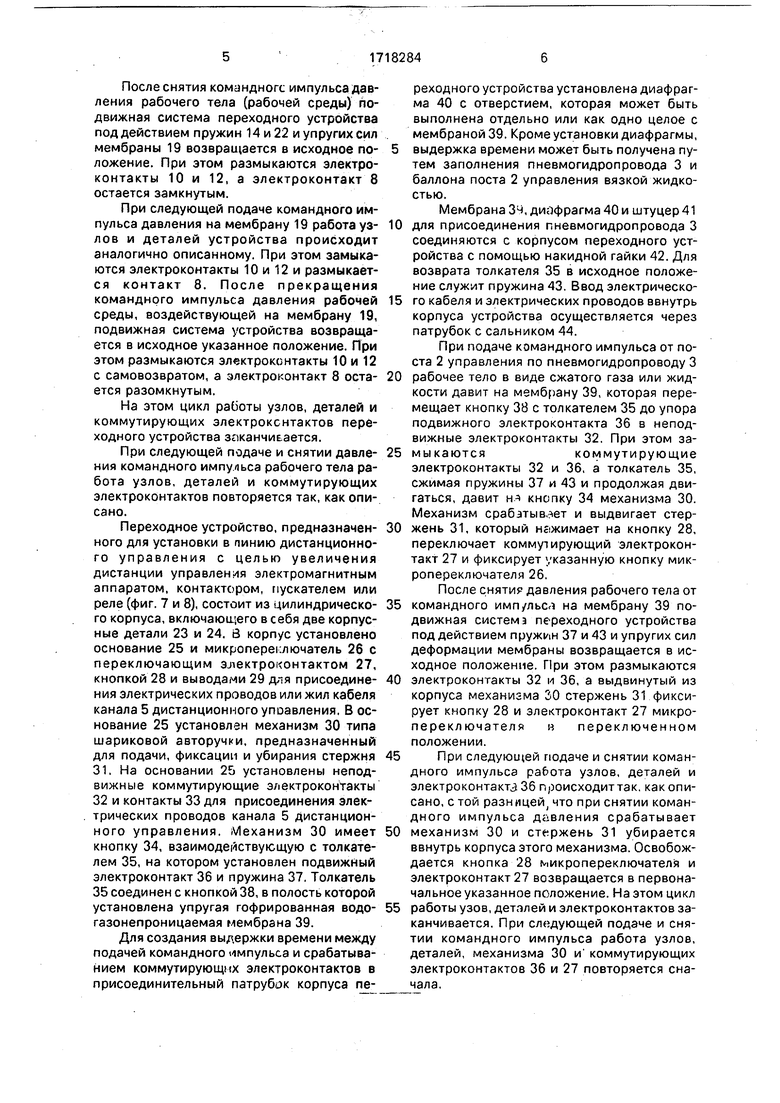
Переходное устройство, предназначенного для установки в пинию дистанционного управления с целью увеличения дистанции управления электромагнитным аппаратом, контактором, пускателем или реле (фиг. 7 и 8), состоит из цилиндрического корпуса, включающего в себя две корпусные детали 23 и 24. 8 корпус установлено основание 25 и микропереключатель 26 с переключающим электроконтактом 27, кнопкой 28 и выводами 29 для присоединения электрических проводов или жил кабеля канала 5 дистанционного упоавления, В основание 25 установлен механизм 30 типа шариковой авторучки, предназначенный для подачи, фиксации и убирания стержня 31. На основании 25 установлены неподвижные коммутирующие электроконтакты 32 и контакты 33 для присоединения электрических проводов канала 5 дистанционного управления. Механизм 30 имеет кнопку 34, взаимодействующую с толкателем 35, на котором установлен подвижный электроконтакт 36 и пружина 37. Толкатель 35 соединен с кнопкой 38, в полость которой установлена упругая гофрированная водо- газонепроницаемая мембрана 39.
Для создания выдержки времени между подачей командного импульса и срабатыванием коммутирующих электроконтактов в присоединительный патрубок корпуса переходного устройства установлена диафрагма 40 с отверстием, которая может быть выполнена отдельно или как одно целое с мембраной 39. Кроме установки диафрагмы,
выдержка времени может быть получена путем заполнения пневмогидропровода 3 и баллона поста 2 управления вязкой жидкостью.
Мембрана 34, диафрагма 40 и штуцер 41
0 для присоединения пневмогидропровода 3 соединяются с корпусом переходного устройства с помощью накидной гайки 42. Для возврата толкателя 35 в исходное положение служит пружина 43. Ввод электрическо5 го кабеля и электрических проводов ввнутрь корпуса устройства осуществляется через патрубок с сальником 44.
При подаче командного импульса от поста 2 управления по пневмогидропроводу 3
0 рабочее тело в виде сжатого газа или жидкости давит на мембрану 39, которая перемещает кнопку 38 с толкателем 35 до упора подвижного электроконтакта 36 в неподвижные электроконтакты 32. При этом за5 мыкаютсякоммутирующие
электроконтакты 32 и 36, а толкатель 35, сжимая пружины 37 и 43 и продолжая двигаться, давит нз кнопку 34 механизма 30. Механизм срабатывает и выдвигает стер0 жень 31, который нажимает на кнопку 28, переключает коммутирующий электроконтакт 27 и фиксирует указанную кнопку микропереключателя 26.
После снятия давления рабочего тела от
5 командного имп/льсл на мембрану 39 подвижная система переходного устройства под действием пружин 37 и 43 и упругих сил деформации мембраны возвращается в исходное положение. При этом размыкаются
0 электроконтакты 32 и 36, а выдвинутый из корпуса механизма 30 стержень 31 фиксирует кнопку 28 и электроконтакт 27 микропереключателя в переключенном положении.
5 При следующей подаче и снятии командного импульса работа узлов, деталей и электроконтактз 36 происходит так. как описано, с той разницей, что при снятии командного импульса давления срабатывает
0 механизм 30 и стержень 31 убирается ввнутрь корпуса этого механизма. Освобождается кнопка 28 микропереключатели и электроконтакт 27 возвращается в первоначальное указанное положение. На этом цикл
5 работы узов, деталей и электроконтактов заканчивается. При следующей подаче и снятии командного импульса работа узлов, деталей, механизма 30 и коммутирующих электроконтактов 36 и 27 повторяется сначала.
Переходное устройство с ножевыми электроконтактами (фиг. 9-13) состоит из основания 45 с седлом 46, которое может быть выполнено из изоляционного материала как одно целое с основанием 45, электропроводным из металла или с металлическим покрытием, и зажимом 47 для присоединения электрических проводов коммутируемых электроцепей. В угловой вырез седла 46 установлено коромысло 48 с укрепленными на нем ножевыми коммутирующими электоконтактами 49. Причем перекидное коромысло 48 может быть выполнено из электропроводного или изоляционного материала, а каждый из указанных электроконтактов 49 может быть выполнен двойным, т.е. к каждому из двух электроконтактов для создания двойного разрыва коммутируемой электроцепи может быть пристроен еще такой же или другой формы электроконтакт и, таким образом, из одного электроконтакта 49 с двойным разрывом электроцепи может быть сделано два аналогичных электроконтакта. Кроме того, указанные электроконтакты могут быть сделаны переключающими (двухсторонними), как указано штриховой линией.
На основании 45 установлены неподвижные электроконтакты 50 с пружинящими губками и винтовыми зажимами 51 для присоединения электрических проводов или жил кабеля электроцепей.
На выступающий конец коромысла 48 установлена возвратно-фиксирующая перекидная пружина 52, второй конец которой упирается в основание вилки 53,предназначенной для замыкания, размыкания и переключения электроконтактов 49, установленной в кнопку 54 с прямоугольной полостью и скосами наружных кромок для создания возможности отклонения указанной вилки в прямоугольной полости кнопки.
Кнопка 54 может перемещаться по вертикали в отверстии изоляционной платы 55, предназначенной для монтажа на ней резисторов и диодов, применяемых в ряде схем дистанционного управления и сигнализации, на которой установлены неподвижные коммутирующие электроконтакты 56 с зажимами 57 для присоединения электрических проводов и жил кабеля, Кнопка 54 соединена или взаимодействует с толкателем 58, на котором установлен подвижный мостиковый коммутирующий электроконтакт 59 и возвратно-прижимная пружина 60. Причем для уменьшения габаритов переходного устройства электроконтакт 59 может быть сделан кольцевым и установлен непосредственно на кнопку 54, как указано штрихпунктирной линией, и взаимодействовать с неподвижными пластинчатыми пружинящими или подпружиненными электроконтактами. Толкатель 58 соединен с кнопкой 61, в полость которой установлена
упругая водогазонепроницаемая гофрированная мембрана 62. Соединение указанной мембраны с корпусом 63 устройства и штуцером 64 для присоединения пневмо- гидропровода 3 осуществляется накидной
0 гайкой 65. Соединение корпуса переходного устройства с корпусом электроаппарата 4 может осуществляться этой же гайкой, сваркой или винтами. В корпус переходного устройства для осуществления сигнализации
5 включенного положения электроаппарата и срабатывания защиты установлены сигнальные электролампы 66 и 67.
При подаче командного импульса от поста 2 управления рабочее тело давит на мем0 брану 62 и перемещает кнопку 61 с толкателем 58 до упора подвижного электроконтакта 59 в неподвижные электроконтакты 56. При этом замыкаются электроконтакты 56 и 59, а толкатель 58 с
5 кнопкой 61, продолжая двигаться, сжимает пружину 60 и давит на кнопку 54, которая передает давление на основание вилки 53. Сжимая пружину 52, вилка 53 скользит по правым граням верхнего угла электрокон0 тактов 49 до упора в правый нижний угол этих электроконтактов. При этом создается опрокидывающий момент коромысла 48 относительно его точки опоры в угловом вырезе седла 46, и коромысло отделяется от
5 левой грани углового выреза седла и мгновенно перебрасывается и прижимается к правой грани. При этом подвижные электроконтакты 49 входят в губки неподвижных . электроконтактов 50 и замыкают комму™0 руемую электроцепь.
После снятия давления командного импульса подвижная система переходного устройства под действием пружин 52 и 60 и силы упругой деформации мембраны 62 воз5 вращается в исходное положение (фиг. 10). При этом размыкаются электроконтакты 56 и 59, а электроконтакты 49 и 50 фиксируются пружиной 52 и остаются замкнутым.
При следующей подаче командного им0 пульса рабочее тело давит на мембрану 62 и перемещает кнопку 61 с толкателем 58 до замыкания электроконтактов 56 и 59. Продолжая двигаться, толкатель 58 давит на кнопку 54 с вилкой 53, которая сжимает пру5 жину 52 и скользит по левым граням верхнего внешнего угла ножевых электро контакте в 49 до упора в нижний внутренний угол этих электроконтактов. При этом появляется опрокидывающий момент электроконтактов 49 относительно
точки опоры коромысла 48 в угловом вырезе седла 46, и коромысло под действием силы давления вилки 53 и возвратно-фиксирующей пружины 52 мгновенно опрокидывается и перебрасывается с правой грани углового выреза седла 46 на его левую грань, размыкаются электроконтакты 49 и 50. После снятия командного импульса давления на мембрану 62 подвижная система переходного устройства под действием пружин 52 и 60 и упругой мембраны 62 возвращается в исходное положение. При этом размыкаются коммутирующие электроконтакты 56 и 59.
На этом цикл работы переходного устройства заканчивается и подвижные узлы, детали и коммутирующие электроконтакты возвращаются в первоначальное положение (фиг. 9).
При следующей подаче и снятии командного импульса давления рабочей среды на мембрану 62 работа узлов, деталей и электроконтактов переходного устройства повторяется сначала.
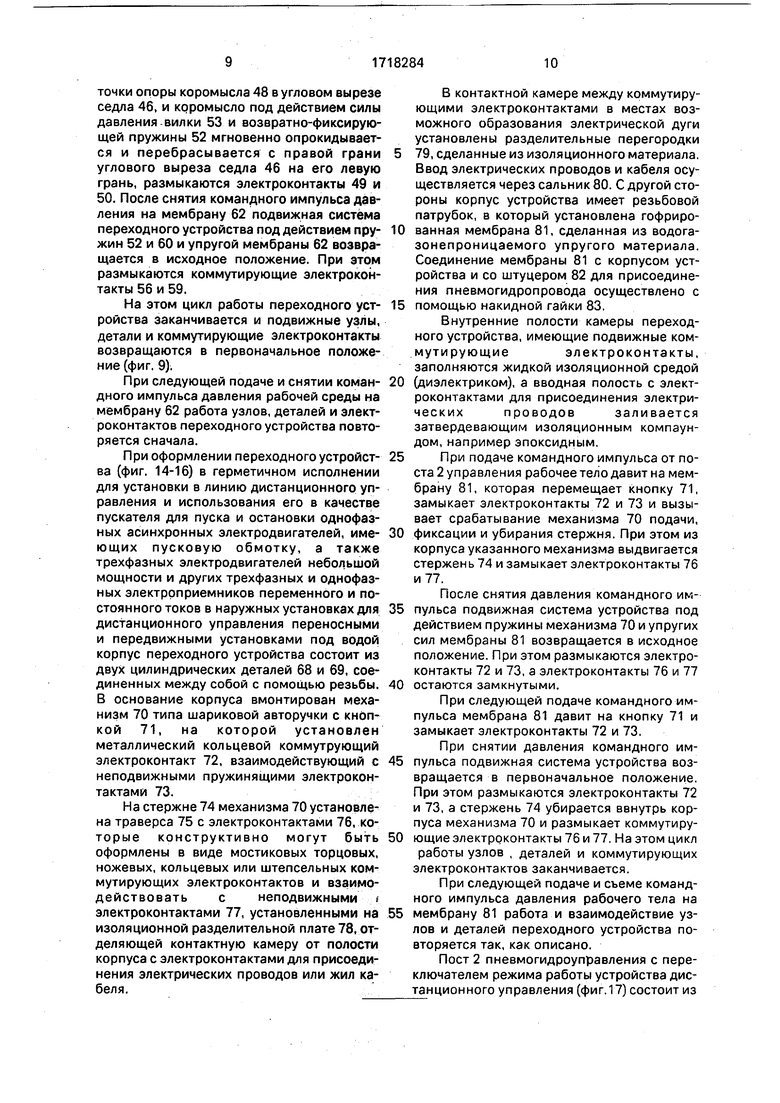
При оформлении переходного устройства (фиг. 14-16) в герметичном исполнении для установки в линию дистанционного управления и использования его в качестве пускателя для пуска и остановки однофазных асинхронных электродвигателей, имеющих пусковую обмотку, а также трехфазных электродвигателей небольшой мощности и других трехфазных и однофазных электроприемников переменного и постоянного токов в наружных установках для дистанционного управления переносными и передвижными установками под водой корпус переходного устройства состоит из двух цилиндрических деталей 68 и 69, соединенных между собой с помощью резьбы. В основание корпуса вмонтирован механизм 70 типа шариковой авторучки с кнопкой 71, на которой установлен металлический кольцевой коммутрующий электроконтакт 72, взаимодействующий с неподвижными пружинящими электроконтактами 73.
На стержне 74 механизма 70 установлена траверса 75 с электроконтактами 76, которые конструктивно могут быть оформлены в виде мостиковых торцовых, ножевых, кольцевых или штепсельных коммутирующих электроконтактов и взаимодействовать с неподвижными электроконтактами 77, установленными на изоляционной разделительной плате 78, отделяющей контактную камеру от полости корпуса с электроконтактами для присоединения электрических проводов или жил кабеля.
В контактной камере между коммутирующими электроконтактами в местах возможного образования электрической дуги установлены разделительные перегородки
79, сделанные из изоляционного материала. Ввод электрических проводов и кабеля осуществляется через сальник 80. С другой стороны корпус устройства имеет резьбовой патрубок, в который установлена гофриро0 ванная мембрана 81, сделанная из во до газонепроницаемого упругого материала. Соединение мембраны 81 с корпусом устройства и со штуцером 82 для присоединения пневмогидропровода осуществлено с
5 помощью накидной гайки 83.
Внутренние полости камеры переходного устройства, имеющие подвижные ком- мутирующиеэлектроконтакты,
заполняются жидкой изоляционной средой
0 (диэлектриком), а вводная полость с электроконтактами для присоединения электрическихпроводовзаливаетсязатвердевающим изоляционным компаундом, например эпоксидным.
5 При подаче командного импульса от поста 2 управления рабочее тело давит на мембрану 81, которая перемещает кнопку 71, замыкает электроконтакты 72 и 73 и вызывает срабатывание механизма 70 подачи,
0 фиксации и убирания стержня. При этом из корпуса указанного механизма выдвигается стержень 74 и замыкает электроконтакты 76 и 77.
После снятия давления командного им5 пульса подвижная система устройства под действием пружины механизма 70 и упругих сил мембраны 81 возвращается в исходное положение. При этом размыкаются электроконтакты 72 и 73, а электроконтакты 76 и 77
0 остаются замкнутыми.
При следующей подаче командного импульса мембрана 81 давит на кнопку 71 и замыкает электроконтакты 72 и 73.
При снятии давления командного им5 пульса подвижная система устройства возвращается в первоначальное положение. При этом размыкаются электроконтакты 72 и 73, а стержень 74 убирается ввнутрь корпуса механизма 70 и размыкает коммутиру0 ющие электроконтакты 76 и 77. На этом цикл работы узлов , деталей и коммутирующих электроконтактов заканчивается.
При следующей подаче и съеме командного импульса давления рабочего тела на
5 мембрану 81 работа и взаимодействие узлов и деталей переходного устройства повторяется так, как описано.
Пост 2 пневмогидроуправления с переключателем режима работы устройства дистанционного управления (фиг.17) состоит из
корпуса 84 с пневмсканалами, в полость которого установлен водогазонепроницае- мый упругий (резиновый) баллон 85 и с помощью резинового патрубка, фланца и накидной гайки 86 соединяется с резьбовым патрубком корпуса и присоединительным штуцером пневмогидропровода.
Для открывания и закрывания каналов поста управления, соединенных с питающим 87 и рабочим 88 пневмопроводом, он снабжен штоком 89 с отверстием, нажимным диском и ладонной кнопкой 90 управления. На штоке 89 установлена возвратная пружина 91 и гайка-ограничитель 92, предназначенная для ограничения и регулирования его хода.
Для фиксации штока 89 и увеличения давления его диска на заполненный рабочим телом баллон 85 указанный шток может быть сделан с резьбой и ввинчиваться в резьбовое отверстие корпуса поста 2 управления. Переключение поста управления с замкнутого режима работы на работу в разомкнутом режиме осуществляется включением в схему управления устройства трехходового крана 93.
Работа и взаимодействие узлов и деталей поста управление.
Работа устройства пнезмогидроуправ- ления электроаппаратами, электроприводом и электроцепями может осуществляться по разомкнутой схеме с применением источника сжатого газа, путем подключения поста 2 управления к питающему пневмопрОЕ:оду 87 или баллону 94 сжатого газа. При осуществлении управления по замкнутой схеме баллон 85 и пнев- могидропровод 3 заполняются сжатым газом или рабочей жидкостью, Для подачи командного импульса необходимо нажать на кнопку 90 и переместить ее до установки отверстия в штоке 89 против канала с присоединенным к нему питающим пневмопроводом 87. При этом перекрывается выхлопной канал 95 и сжатош газ по пневмопроводу 87 через отверстие в штоке 89 поступает в камеру с упругим баллоном 85, заполненным рабочей средой, сжимает его и увеличивает давление в замкнутой системе, которое по пневмогидропроводу 3, заполненному рабочей средой, передается на мембрану переходного устройства 1 и вызывает замыкание, размыкание или преключе- ние его электроконтактов.
После отпускания кнопка 90, под действием пружины 91, упругих сил деформированного баллона 85, мембраны и сжатого газа в замкнутой системе, она вместе со штоком 89, снабженным нажимным диском, возвращается в исходное указанное положение. При этом шток 89 перекрывает канал питающего пнеемоп(: овода 87, а отверстие штока становится против выпускного канала 95, и сжатый газ из камеры с баллоном 85
выходит в окружающую среду (атмосферу). При этом снимается давление с баллона 85 и с мембраны переходного устройства 1. На этом цикл подачи и съема давления командного импульса заканчивается. При следую0 щем нажатии и отпускании кнопки 90 работа узлов и деталей поста 2 управления повторяется.
Подача и съем давления командного импульса в замкнутой системе может осущест5 вляться и без источника сжатого газа путем нажатия на кнопку 90 и создания давления на баллон 85 с помощью штока 89 с нажимным диском.
Работа устройства дистанционного уп0 равления по разомкнутой схеме осуществляется при установке трехходового крана 93 в положение, ук занное в нижней части фиг. 17.
Подача командного импульса произво5 дится нажатием кнопки 90. При этом шток 89, сжимая пружину 1)1, перемещается в направлении баллона 85, перекрывает выпускной (выхлопной). канал 95 и продолжает движение до устаноьки его отверстия про0 тив канала с питающим пневмопроводом 87. При этом сжатый газ из пневмопровода 87 по пневмогидроканалу 3 поступает в полость мембраны переходного устройства и вызывает срабато ваиие его электроконтак5 тов.
После отпускания кнопки 90, под действием пружины 91 и упругих сил деформаци наполненного газом баллона 85, шток 89 возвращается в исходное указанное поло0 жение(фиг. 17). При этом шток перекрывает канал поста управления, соединенный с питающим пневмопроводом 87, открывает выпускной канал 95, сжатый газ через отверстие в штоке 89 и канал 95 поста 2
5 управления из пневмэгидропровода 3 выпускается в окруж&ющую среду (атмосферу) и, таким образом, снимается давление рабочего тела на мембрану переходного устройства 1.
0 На этом цикл работы узлов и деталей поста управления по подаче и съему давления рабочего тел/э на мембрану переходного устройства 1 по разомкнутой схеме заканчивается.
5 При следующем нажатии и отпускании кнопки 90 управления работа узлов и деталей поста управления повторится так, как описано.
Педальный пост управления (фиг. 18), предназначенный для работы в замкнутой
системе и одновременной подачи командного импульса на два управляемых объекта, состоит из корпуса 96, внутри которого установлен водогазонепроницаемый баллон 97 в виде полого кольца из резины или другого упругого материала, который с помощью резьбовых патрубков, фланцев и накидных гаек 98 соединен с корпусом и со штуцером 99 для присоединения пневмо- гидропроводов 3. Кроме того, внутри корпуса на стержне 100 установлена возвратная пружина 101 и нажимной диск со штоком 102, взаимодействующим с педалью 103, соединенной с корпусом 96 посредством оси 104.
Баллону 97 может быть придана форма, отличная от той, которая указана на фиг. 18.
Для обеспечения работы устройства дистанционного управления в замкнутой системе баллон 97 поста 2 управления и пневмогидропровод 3 заполняются жидкой или газообразной рабочей средой (рабочим телом). Подача и снятие давления командного импульса на мембрану переходного устройства 1 осуществляется нажатием педали 103 поста 2 управления. При этом педаль 103 давит на шток 102 с нажимным диском, который, сжимая пружину 101, передает давление на баллон 97, заполненный рабочей средой, и посредством ее по пневмогид- ропроводу 3 это давление передается на мембрану переходного устройства 1 и вызывает срабатывание соответствующих .коммутирующих электроконтактов.
После отпускания педали 103, под действием возвратной пружины 101, упругих сил деформированной мембраны и возвратной пружины переходного устройства 1, упругих сил деформированного баллона 97 и упругости сжатого газа, подвижная система поста 2 управления возвращается в исходное указанное положение.
На этом цикл работы узлов и деталей поста 2 управления и мембраны переходного устройства 1 заканчивается. При следующем нажатии и отпускании педали 103 работа узлов и деталей повторится.
Работа электрической схемы управления магнитным пускателем электропровода, снабженного трехфазным асинхронным электродвигателем 105, с применением предлагаемого устройства (фиг.20) заключается в том, что при подаче давления командного импульса от поста 2 управления на мембрану переходного устройства 1 замыкаются его электроконтакты 106 и 107. При этом катушка 108 магнитного пускателя получает питание, включает контактор и замыкает вспомогательный замыкающий
электроконтакт 109, осуществляющий нулевую защиту приводного электродвигателя. После съема давления командного импульса на мембрану переходного устройства 1 размыкается электроконтакт 106, а электроконтакт 107 остается замкнутым. На этом пуск электродвигателя заканчивается. Для остановки электродвигателя необходимо подать и снять давление командного им0 пульса с помощью кнопки или педали поста 2 управления на мембрану переходного устройства 1. При этом замыкается и размыкается коммутирующий электроконтакт 106, размыкается и остается разомкнутым ком5 мутирующий электроконтакт 107. Катушка 108 пускателя теряет питание и отключает контактор, который размыкает вспомогательный замыкающий электроконтакт 109 и главные электроконтакты в цепи питания
0 приводного электродвигателя 105.
На этом цикл включения-отключения магнитного пускателя (пуска и остановки электродвигателя 105 привода) заканчивается. При срабатывании нулевой или тепло5 вой защиты магнитного пускателя электропривода схема управления (фиг. 20) автоматически переходит в пробно-предупредительный или толчковый режим, предотвращающий поломку рабочих органов и
0 инструмента технологических машин и механизмов, а также обрабатываемых деталей и изделий при их заклинивании.
Включение, отключение и реверсирование электродвигателя привода с помощью
5 двух комплектов предлагаемого устройства может быть осуществлено по принципиальной электрической схеме (фиг. 19). Работа этой схемы аналогична работе описанной схемы управления и отличается от нее рабо0 той введенных в схему блокировочных электроконтактов переходного устройства 1. Электроконтакты 110 и 111 введены в схему управления для взаимной блокировки цепей управления.
5 Формула изобретения
1. Устройство для дистанционного управления электрическими аппаратами, электродвигателями и электроцепями, содержащее пост управления, канал дистан0 ционного управления, мембрану и две контактные группы, мембрана кинематически связана с подвижным контактом одной из двух указанных контактных групп, от л и- чающееся тем, что, с целью расширения
5 эксплуатационных возможностей, повышения надежности, упрощения устройства и управления за счет уменьшения количества органов и каналов дистанционного управления, мембрана кинематически связана с подвижным контактом второй контактной
группы, причем в качестве первой контактной группы использована контактная группа с механизмом самовозврата, а в качестве второй контактной группы использована контактная группа с механизмом фиксации подвижного контакта.
2.Устройство по п. 1, о т л и ч а ю щ е е- с я тем, что, с целью расширения эксплуатационных возможностей, в качестве контактной группы снабженной механизмом фиксации, использована переключающая контактная группа.
3.Устройство поп. 1, о т л и ч а ю щ е е- с я тем, что, с целью расширения эксплуатационных возможностей, в него введена по крайней мере одна дополнительная контактная группа, подвижный контакт каждой из которых связан с механизмом фиксации.
4.Устройство по п. 1,отличающее- с я тем, что, с целью расширения эксплуатационных возможностей и упрощения управления, в него введена камера с упругим
газоводонепроницаемым баллоном, который механически связан с каналом дистанционного управления.
5.Устройство по п. 1, отличающее- с я тем, что, с целью повышения надежности управления, в качестве мембраны использована гофрированная мембрана.
6.Устройство поп. Ч.отличающее- с я тем, что, с целью расширения эксплуатационных возможностей, в него введена
диафрагма с отверстием, площадь сечения которого меньше площади сечения канала дистанционного управления, причем указанная диафрагма с отверстием механически связана с каналом дистанционного
управления.

| название | год | авторы | номер документа |
|---|---|---|---|
| Электрический разъем | 1986 |
|
SU1457024A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ПОДАЧИ ВОДЫ В ВОДОНАПОРНУЮ БАШНЮ | 1994 |
|
RU2078880C1 |
| СИГНАЛИЗАТОР ДАВЛЕНИЯ УНИВЕРСАЛЬНЫЙ | 2019 |
|
RU2724820C1 |
| ГИДРОЭЛЕКТРИЧЕСКОЕ РЕЛЕ В.И.КОЗИНА | 1993 |
|
RU2062935C1 |
| УСТРОЙСТВО для ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ГРУППОЙ ДВУХПОЗИЦИОННЫХ ОБЪЕКТОВ | 1973 |
|
SU368704A1 |
| Система дистанционного управления двигателем с реверс-редукторной передачей | 1980 |
|
SU960457A2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОАППАРАТАМИ | 1991 |
|
RU2035836C1 |
| Ленточный бремсберговый конвейер | 1978 |
|
SU981134A1 |
| Пускатель-автомат | 1982 |
|
SU1105956A1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ПОДАЧИ СМАЗКИ | 1971 |
|
SU426056A1 |
Изобретение относится к электротехнике и может быть использовано для дистанционного включения, отключения и переключения магнитных пускателей, контакторов, реле и других электроаппаратов. Цель изобретения - повышение надежности и упрощение управления, расширение эксплуатационных возможностей. Устройство содержит пост управления, включающий в себя кнопочный блок, пневмогидропровод, переходной блок с мембраной, две контактные группы и выводы для подключения элек- трического аппарата. При подаче командного импульса с поста управления по пневмогидропроводу рабочее тело в виде сжатого газа или жидкости давит на мембрану, которая перемещает подвижный контакт. Представлены различные варианты построения и конструктивного оформления устройства. 5 з.п. ф-лы, 20 ил. м W Ё
4
/ Ј-$±3
(У
105
фиг.
405 I 3
Z
Bk
L/.
Si
S3
23
21
Риъ.8
ю
58
j/ -45
40
9м. 9
Ив. 1В
т со
S
/
и
I
т
рэ о
V
и
82
83
80
Фиг.15
78
В-д
Фиг. 16
L9 98 ГГ 56 M и
8/Mfr
Ш f L6
66
Ш
LW&
Ј6
И
fr828lil
фиг.®
Л
фаг.
| ПНЕВМАТИЧЕСКИЙ ПРИВОД | 0 |
|
SU261516A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
