фие.
Изобретение относится к измерительной технике и может быть использовано для контроля качества приводов проигрывающих устройств.
Известно устройство для измерения момента сопротивления вращению ротора электрических микромашин, содержащее основание, на котором установлен привод вращения статора электрической машины, измерительный преобразователь и блок управления.
Однако устройство не обеспечивает требуемой точности и многофункциональности.
Известно также устройство для измерения неравномерности скорости вращения, содержащее основание, инерционную массу, датчик измерения скорости вращения и электронную схему измерения скорости вращения. При этом датчик измерения скорости вращения выполнен в виде чувствительного элемента с источником света, а инерционная масса выполнена в виде диска с метками.
Недостатками известного устройства являются ограниченность количества измеряемых параметров и невысокая точность за счет дискретности первичной информации.
Наиболее близким к предлагаемому является устройство для измерения угловых вибрационных ускорений, содержащее подключенные к согласующим усилителям два пьезодатчика.линейных ускорений, оснащенные инерционными массами, жестко установленные на одном основании, блок измерения и регистрации. При этом пьезоэ- лементы датчиков подключены последовательно и установлены относительно основания в противоположной полярности и оси максимальной поперечной чувствительности пьезоэлементов расположения на одной прямой.
Недостатком известного устройства является ограниченность количества измеряемых параметров, так как оно позволяет измерять лишь ускорение вибрационных колебаний с одной определенной ориентацией, также устройство не позволяет измерять силу реакций.
Цель изобретения - расширение функциональных возможностей путем одновременного измерения неравномерности вращения ротора и радиальной реакции ротора.
Поставленная цель достигается тем, что в устройстве для измерения реакций в опорах привода проигрывателя, содержащем основание, инерционную массу, соединенную через контактные элементы и измерительные преобразователи с основанием, блок измерения и узел регистрации, содержится дополнительно возбудитель угловых вибраций, соосно расположенный с осью
вращения ротора привода проигрывателя. Инерционная масса выполнена в виде плиты с закрепленным на ней статором и свободно вращающимся ротором проигрывателя, а измерительные преобразователи прикреп0 лены к четырем упругим элементам, выполненным в виде мембраны, расположенным на основании равномерно по радиусу на одинаковом расстоянии от оси вращения ротора и связанным со статором привода
5 через контактные элементы,-и инерционной массы. Блок измерения выполнен в виде последовательно соединенных аналого- цифрового преобразователя, запоминающего устройства, мультиплексора и блока
0 управления, управляющие выходы которого соединены с управляющими входами аналого-цифрового преобразователя, запоминающего устройства, мультиплексора и через блок переключения подключены к обмоткам
5 возбудителя угловых колебаний и привода проигрывателя.
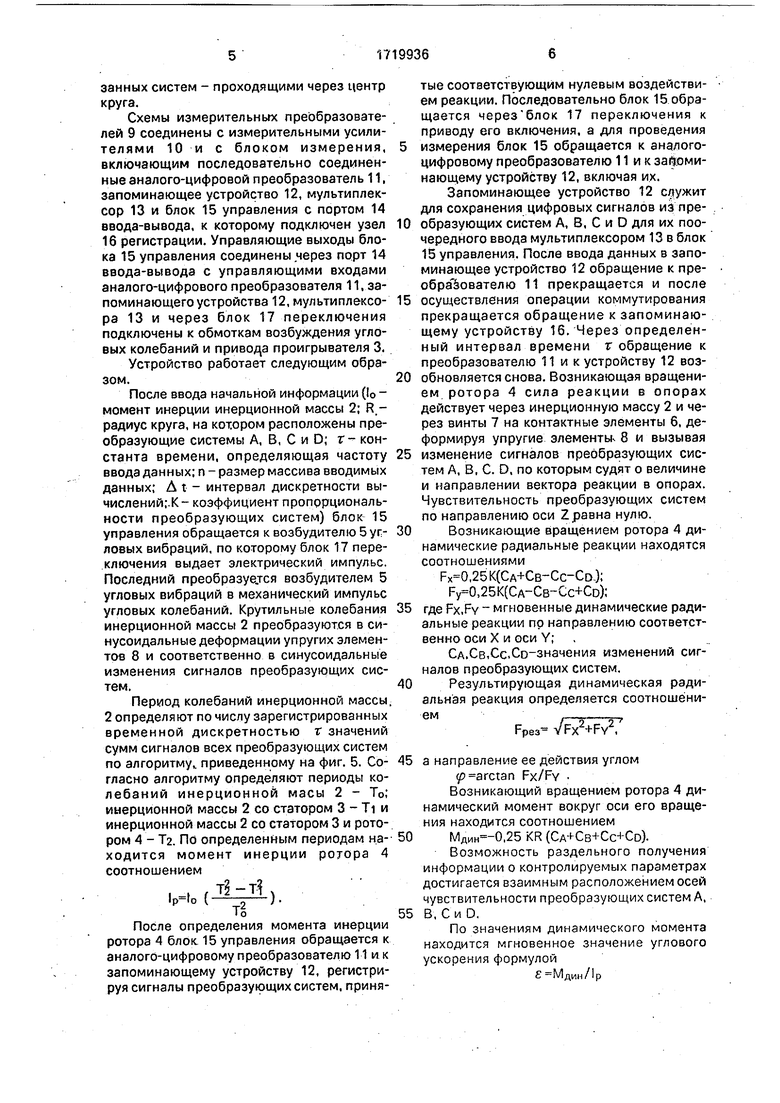
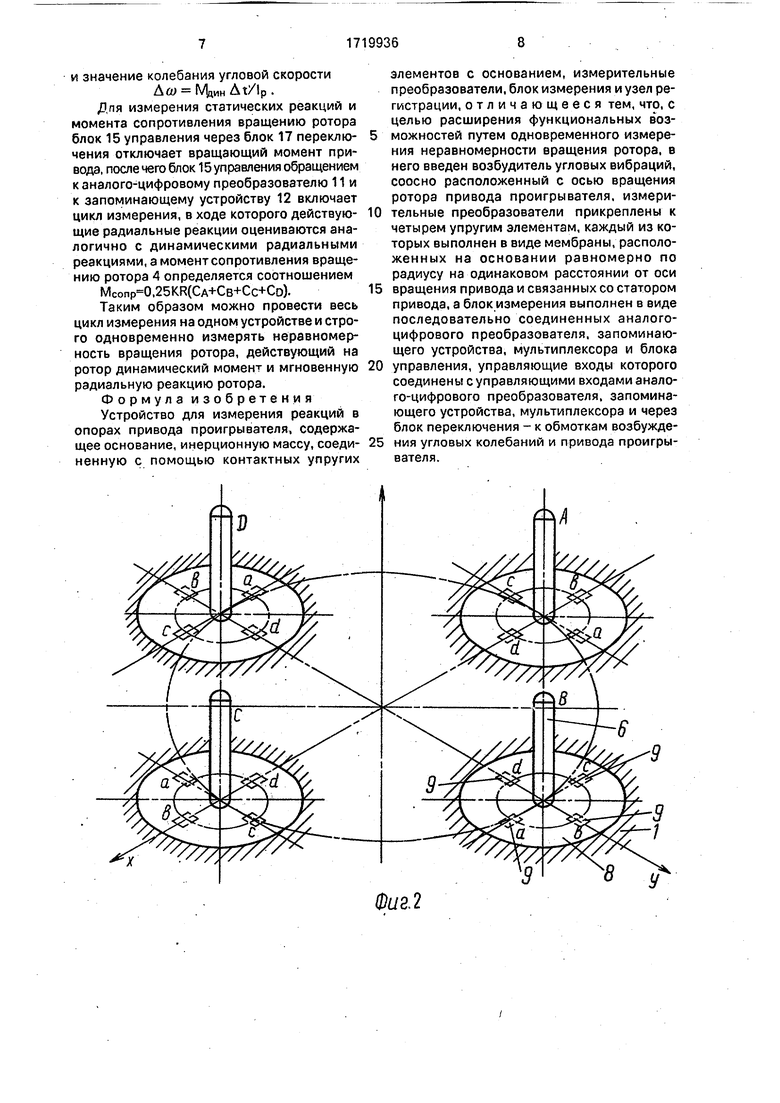
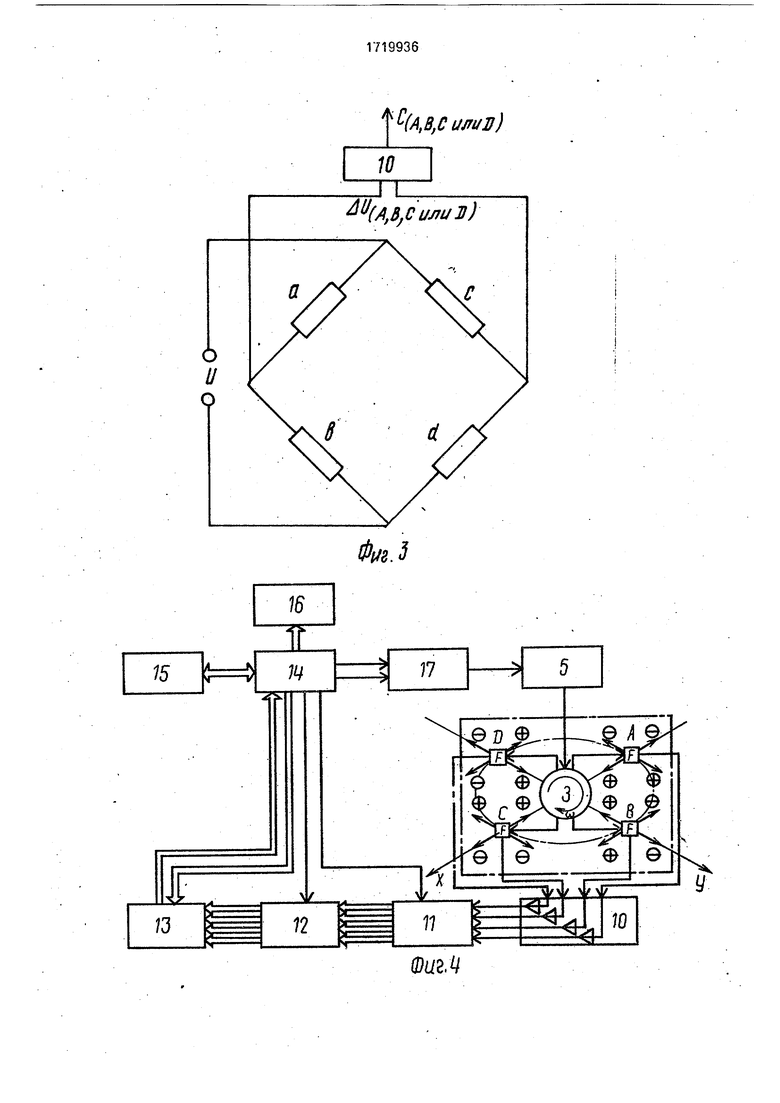
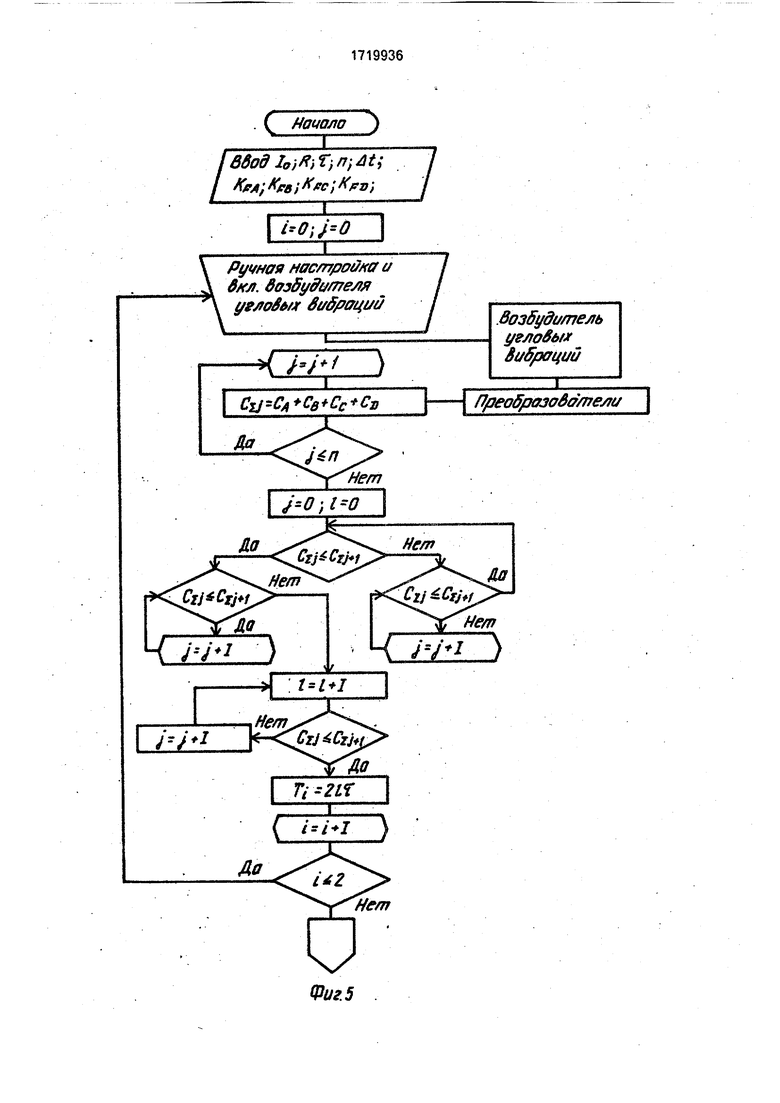
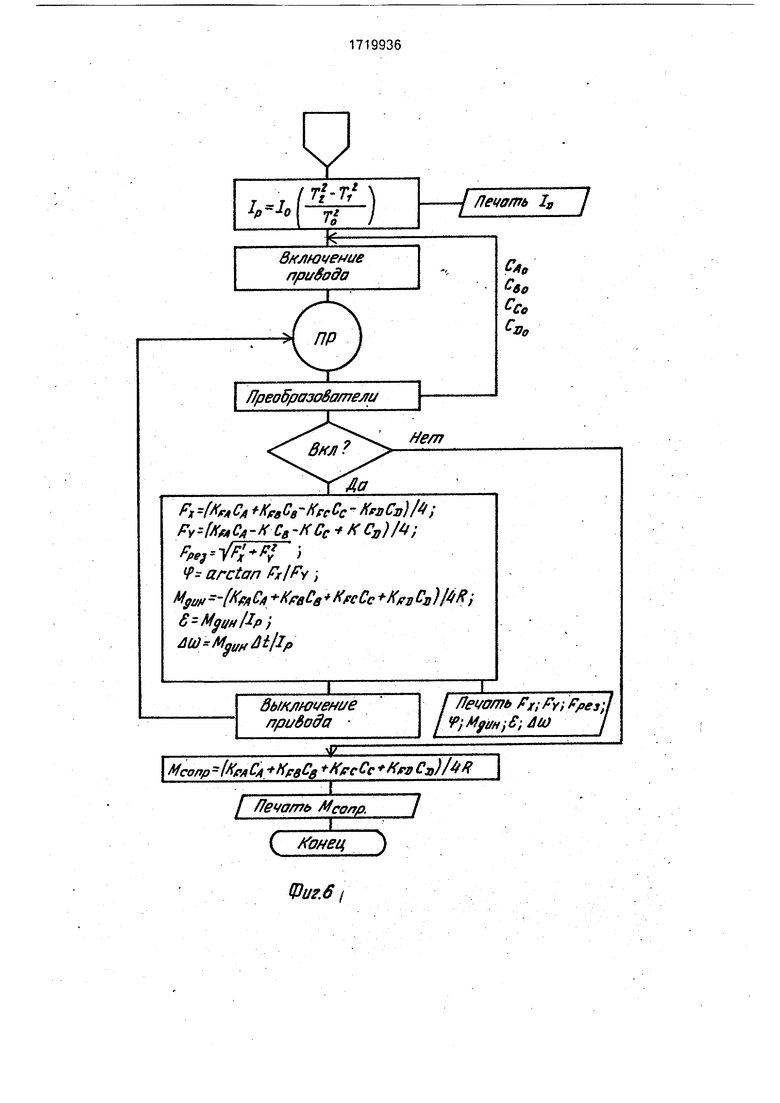
На фиг. 1 представлена схема устройства; на фиг. 2 - схема расположения измерительных преобразователей; на фиг. 3 0 пример выполнения электрической схемы преобразующей системы; на фиг. 4 - принципиальная схема работы устройства; на фиг. 5 - алгоритм работы устройства; на фиг. 6-то же, продолжение.
5
Устройство имеет основание 1, на котором находятся инерционная масса 2, закрепленный на ней статор 3 и ротор А привода. На основании 1 соосно с осью вра0 щения ротора 4 закреплен возбудитель 5 угловых вибраций. Инерционная масса 2 связана с основанием 1 посредством четырех стержневидных контактных элементов 6, упирающихся, например, сферическим
5 концом в конические гнезда регулируемых винтов 7 и жестко закрепленных своим другим плоским концом к центру упругого элемента 8, выполненного в виде мембраны, закрепленной по окружности с основанием
0 1. К упругим элементам 8 прикреплены измерительные преобразователи 9, например, тензорезисторы (а, Ь, с, d) в мостовой схеме, с образованием четырех систем преобразования (А, В, С, D). Оси одинаковой
5 чувствительности систем преобразования А, В, С или D выполнены касательными к кругу, образованному через центры мембраны 8 плоскости вращения ротора 4, и направлены по его вращению, а оси противоположной чувствительности указанных систем - проходящими через центр круга.
Схемы измерительных преобразователей 9 соединены с измерительными усилителями 10 и с блоком измерения, включающим последовательно соединенные аналого-цифровой преобразователь 11, запоминающее устройство 12, мультиплексор 13 и блок 15 управления с портом 14 ввода-вывода, к которому подключен узел 16 регистрации. Управляющие выходы блока 15 управления соединены через порт 14 ввода-вывода с управляющими входами аналого-цифрового преобразователя 11, запоминающего устройства 12, мультиплексора 13 и через блок 17 переключения подключены к обмоткам возбуждения угловых колебаний и привода проигрывателя 3.
Устройство работает следующим образом.
После ввода начальной информации (0 - момент инерции инерционной массы 2; R,- радиус круга, на котором расположены преобразующие системы А, В, С и D; г- константа времени, определяющая частоту ввода данных; п - размер массива вводимых данных; At- интервал дискретности вычислений; - коэффициент пропорциональности преобразующих систем) блок 15 управления обращается к возбудителю 5 угловых вибраций, по которому блок 17 переключения выдает электрический импульс. Последний преобразуе.тся возбудителем 5 угловых вибраций в механический импульс угловых колебаний. Крутильные колебания инерционной массы 2 преобразуются в синусоидальные деформации упругих элементов 8 и соответственно в синусоидальные изменения сигналов преобразующих систем.
Период колебаний инерционной массы. 2 определяют по числу зарегистрированных временной дискретностью т значений сумм сигналов всех преобразующих систем по алгоритму,, приведенному на фиг. 5. Согласно алгоритму определяют периоды колебаний инерционной масы 2 - Т0; инерционной массы 2 со статором 3 - Ti и инерционной массы 2 со статором 3 и ротором 4 - Т2. По определенным периодам находится момент инерции ротора 4 соотношением
,, riLiiL
Ip-lo (2j.
То
После определения момента инерции ротора 4 бло(с 15 управления обращается к аналого-цифровому преобразователю 11 и к запоминающему устройству 12, регистрируя сигналы преобразующих систем, принятые соответствующим нулевым воздействием реакции. Последовательно блок 15 обращается через блок 17 переключения к приводу его включения, а для проведения 5 измерения блок 15 обращается к аналого- цифровому преобразователю 11 и к запоминающему устройству 12, включая их.
Запоминающее устройство 12 служит для сохранения цифровых сигналов из пре0 образующих систем А, В, С и D для их поочередного ввода мультиплексором 13 в блок 15 управления. После ввода данных в запоминающее устройство 12 обращение к пре- обра зователю 11 прекращается и после
5 осуществления операции коммутирования прекращается обращение к запоминающему устройству 16. Через определенный интервал времени г обращение к преобразователю 11 и к устройству 12 воз0 обновляется снова. Возникающая вращением ротора 4 сила реакции в опорах действует через инерционную массу 2 и через винты 7 на контактные элементы 6, деформируя упругие элемент 8 и вызывая
5 изменение сигналов преобразующих систем А, В, С. D, по которым судят о величине и направлении вектора реакции в опорах. Чувствительность преобразующих систем по направлению оси Zравна нулю.
0 Возникающие вращением ротора 4 динамические радиальные реакции находятся соотношениями
,25К(СА+Св-Сс-Со-); ,25К(Сд-Св-Сс+Со);
5 где FX.FY мгновенные динамические радиальные реакции по направлению соответственно оси X и оси Y;
Сд.Св,Сс,Со-значения изменений сигналов преобразующих систем.
0 Результирующая динамическая радиальная реакция определяется соотношением г
Fpe3 VFX2+FY2,
5 а направление ее действия углом arctan FX/FY
Возникающий вращением ротора 4 динамический момент вокруг оси его вращения находится соотношением 0МДин -0,25 KR (CA+CB+CC+CD).
Возможность раздельного получения
информации о контролируемых параметрах
достигается взаимным расположением осей
чувствительности преобразующих систем А,
5 В, СиО.
По значениям динамического момента находится мгновенное значение углового ускорения формулой
дин/lp
и значение колебания угловой скорости
Дш IVJUMH At/lp .
Дпя измерения статических реакций и момента сопротивления вращению ротора блок 15 управления через блок 17 переклю- чения отключает вращающий момент привода, после чего блок 15 управления обращением к аналого-цифровому преобразователю 11 и к запоминающему устройству 12 включает цикл измерения, в ходе которого действую- щие радиальные реакции оцениваются аналогично с динамическими радиальными реакциями, а момент сопротивления вращению ротора 4 определяется соотношением Мсопр 0,25КК(СА+Св+Сс+Со).
Таким образом можно провести весь цикл измерения на одном устройстве и строго одновременно измерять неравномерность вращения ротора, действующий на ротор динамический момент и мгновенную радиальную реакцию ротора.
Формула изобретения Устройство для измерения реакций в опорах привода проигрывателя, содержащее основание, инерционную массу, соеди- ненную с помощью контактных упругих
элементов с основанием, измерительные преобразователи, блок измерения и узел регистрации, отличающееся тем, что, с целью расширения функциональных возможностей путем одновременного измерения неравномерности вращения ротора, в него введен возбудитель угловых вибраций, соосно расположенный с осью вращения ротора привода проигрывателя, измерительные преобразователи прикреплены к четырем упругим элементам, каждый из которых выполнен в виде мембраны, расположенных на основании равномерно по радиусу на одинаковом расстоянии от оси вращения привода и связанных со статором привода, а блок измерения выполнен в виде последовательно соединенных аналого- цифрового преобразователя, запоминающего устройства, мультиплексора и блока управления, управляющие входы которого соединены с управляющими входами аналого-цифрового преобразователя, запоминающего устройства, мультиплексора и через блок переключения - к обмоткам возбуждения угловых колебаний и привода проигрывателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для вибрационных испытаний быстровращающихся роторов | 2019 |
|
RU2757974C2 |
| СПОСОБ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРОВ И КОЛЕБАТЕЛЬНАЯ СИСТЕМА БАЛАНСИРОВОЧНОГО СТАНКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2077035C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДИСБАЛАНСА | 1994 |
|
RU2078320C1 |
| СПОСОБ ПРОГРАММНОГО УПРАВЛЕНИЯ ШАГОВЫМ ПЕРЕМЕЩЕНИЕМ ПОСРЕДСТВОМ ШАГОВОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
SU1795861A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ БАЛАНСИРОВКИ РОТОРА | 2004 |
|
RU2270985C1 |
| Вибратор с резонансной настройкой | 2022 |
|
RU2816833C1 |
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2016 |
|
RU2656119C2 |
| УСТАНОВКА ДЛЯ ИЗМЕРЕНИЯ СОБСТВЕННОЙ ЧАСТОТЫ КОЛЕБАНИЙ РОТОРОВ СИЛОВЫХ ГИРОСКОПОВ | 2012 |
|
RU2515424C1 |
| СИСТЕМА МОНИТОРИНГА АВТОМАТИЧЕСКИХ РЕГУЛЯТОРОВ ВОЗБУЖДЕНИЯ И СИСТЕМ ВОЗБУЖДЕНИЯ ГЕНЕРАТОРОВ ЭЛЕКТРОСТАНЦИИ | 2013 |
|
RU2509333C1 |
| ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1997 |
|
RU2130118C1 |
Изобретение относится к приборостроению и может найти применение для измерения реакций в опорах привода проигрывателя. С целью расширения функциональных возможностей путем одновременного измерения неравномерности вращения ротора и действующих в опоре реакций, устройство содержит основание 1, инерционную массу 2, статор 3 и ротор 4 привода, возбудитель угловых вибраций 5. Инерционная масса 2 имеет винты 7 и опору. Основание 1 имеет упругие элементы 8 с измерительными преобразователями 9. Измерительная часть включает аналого-цифровой преобразователь, запоминающее устройство, мультиплексор и блок управления. 6 ил.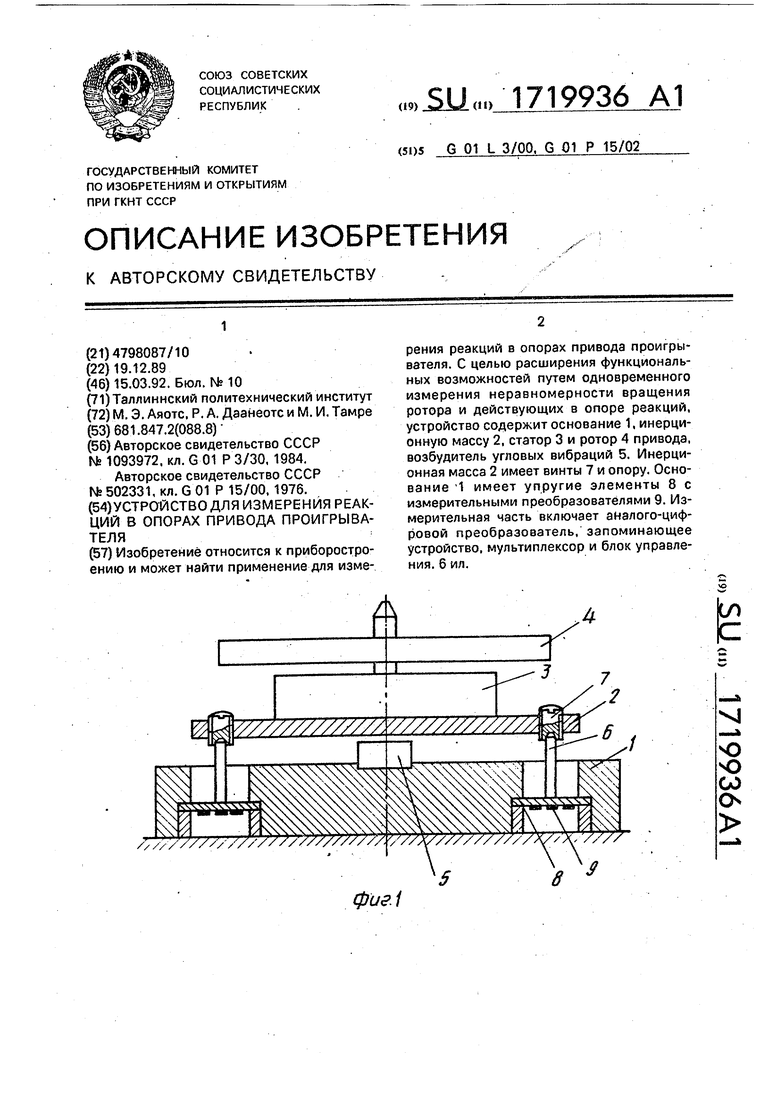
0И8.2
№(A,B,Ct/JWV)
П
M(AtB,CUffu3)Фм.З
ФагМ
I
С Мазало ) i
ввод &)/ }Г;/7;Л ; KffA t КщКес ),
Д Ручная настройка а вкл. возбудителя уг/roSw виёрацид
( Н+/ }
I
Cij CA+Ce+Cc+Cv
j:0 tl 0
Ч .J-J i )
|
Нет
До
Г/ 2LT ( )
/
.Возбудитель угло&ь/х Вибраций
Преобраэова те/к/
Нет
)
У
Ж.
Мсопр(КгАСА+КрвСб +ХрсСс+КгзСя)/4Я
Г
/ /7evo/m Мсо/гр. / { Хонец j
| Устройство для измерения неравномерности скорости вращения | 1982 |
|
SU1093972A2 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для измерения угловых вибрационных ускорений | 1974 |
|
SU502331A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
