Изобретение относится к области точного приборостроения и предназначено для измерения пространственной ориентации оси буровой скважины.
Известен измерительный блок инклинометра (а.с. 1827541, G 01 C 19/00, E 21 B 47/02, публ. БИ N 26-1993 г), содержащий гироскоп, датчики угла и датчики момента, трехкомпонентный блок акселерометров.
Недостатком известного измерительного блока является то, что в состав скважинного прибора входят четыре измерительных прибора: три акселерометра и один гироскоп, что увеличивает габариты и стоимость устройства в целом.
Известен инклинометр (п. N 2004786, E 21 B 47/02, публ. БИ N 45-46-1993 г), взятый в качестве прототипа, состоящий из скважинного прибора, каротажного кабеля и наземного вычислителя. Скважинный прибор этого инклинометра состоит из двухкомпонентного блока акселерометров, двухосного датчика угловой скорости и трехстепенного гироскопа, используемого в режиме свободного гироскопа и гироскопа направления. Функциональная связь между блоком акселерометров и датчиками угловой скорости, работающими в режиме выставки, и блоком акселерометров и трехстепенным гироскопом, работающим в движении, осуществляется через вычислитель наземного прибора.
Недостатком известного инклинометра являются сложная конструкция, большие габариты и высокая стоимость.
Задачей предлагаемого устройства является минимизация количества измерительных устройств инклинометра, что позволяет уменьшить его габариты и расширить функциональные возможности, а также снизить стоимость.
Поставленная задача решается тем, что в гироскопическом инклинометре, содержащем наземный прибор, связанный с ним каротажным кабелем скважинный прибор, включающий магнитосферический трехстепенной гироскоп, в скважинный прибор дополнительно введены последовательно соединенные блок выработки составляющих ускорения и передающее устройство, при этом входы блока выработки составляющих ускорения подключены параллельно входам четырехполюсников по каждой оси подвеса ротора трехстепенного гироскопа, а выходы блока выработки составляющих ускорения соединены с первым, вторым и третьим входами передающего устройства, четвертый и пятый входы которого подключены параллельно нагрузочным сопротивлениям канала датчик угла - датчик момента по двум измерительным осям гироскопа, при этом выход передающего устройства подключен через каротажный кабель к наземному прибору.
В гироскопическом инклинометре передающее устройство содержит последовательно соединенные мультиплексор, аналого-цифровой преобразователь, регистр и передатчик измеренных величин, при этом первый, второй и третий входы мультиплексора подключены к выходам усилителей преобразователей блока выработки составляющих ускорения, четвертый и пятый входы подключены к нагрузочным сопротивлениям канала датчик угла - датчик момента магнитосферического гироскопа, шестой вход мультиплексора соединен с первым выходом блока управления режимами работы, второй, третий и четвертый выходы которого соединены с вторыми входами аналого-цифрового преобразователя, регистра, передатчика измеренных величин соответственно.
В гироскопическом инклинометре наземный прибор содержит контроллер приема измеренных величин, вычислитель и блок индикации, при этом первый вход контролера приема подключен к каротажному кабелю, второй вход подключен к датчику глубины, выход контроллера соединен со входом вычислителя, а вычислитель первым выходом подключен к устройству индикации, вторым - к внешней ЭВМ.
Наличие указанных признаков позволяет сделать вывод о новизне технического решения.
При сравнении заявленного решения с другими техническими решениями в данной области техники выявлена совокупность признаков, отличающих заявленное решение от прототипа, что позволяет сделать вывод о соответствии технического решения критерию изобретения "изобретательский уровень".
Таким образом, заявленное техническое решение является новым, имеет изобретательский уровень, промышленно применимо.
Сущность предлагаемого изобретения поясняется чертежами, где на фиг. 1 изображена схема гироскопического инклинометра, на фиг. 2 - схема подвеса ротора гироскопа по четырем осям, на фиг. 3 - схема блока выработки составляющих ускорения, на фиг. 4 - блок-схема передающего устройства и наземного прибора.
Гироскопический инклинометр фиг. 1 состоит из скважинного прибора 1, каротажным кабелем 2 связанного с наземным приором 3.
Скважинный прибор 1 содержит трехстепеной магнитосферический гироскоп 4, блок 5 выработки составляющих ускорения, передающее устройство 6.
Трехстепенной магнитосферический гироскоп 4 содержит ротор 7, магниторезонансный подвес 8 ротора 7 с верхним 9 и нижним 10 статорами подвеса. На верхнем и нижнем статоре расположены по четыре полюса с электромагнитными катушками 11, которые образуют четыре оси неортогонального подвеса. Гироскоп 4 имеет двухкоординатный датчик 12 угла и двухкоординатный датчик 13 момента. Входы блока 5 выработки составляющих ускорения соединены с четырехполюсниками подвеса 8, три выхода блока 5 выработки составляющих ускорения - с передающим устройством 6. Четвертый и пятый входы передающего устройства 6 соединены с нагрузочными сопротивлениями 14.
Продольная ось гироскопа направлена по оси Z, оси X и Y связаны с корпусом гироскопа и лежат в плоскости, перпендикулярной оси Z.
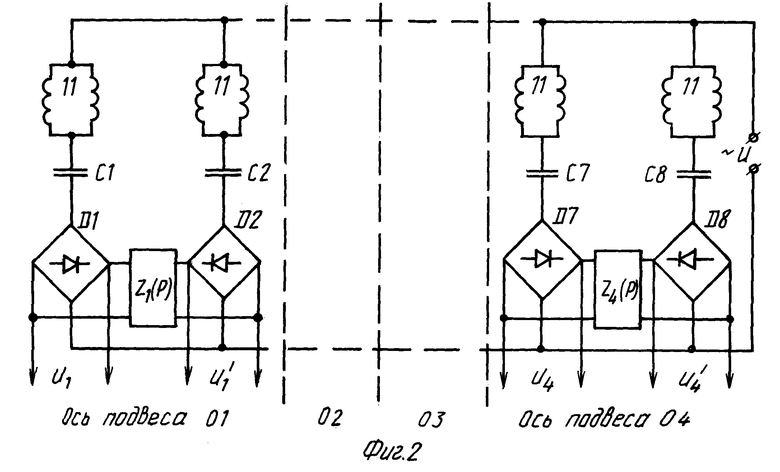
Схема подвеса 8 ротора гироскопа по четырем осям (фиг. 2) содержит электромагнитные катушки подвеса 11, по две для каждой из четырех осей подвеса, резонансные конденсаторы C1, C3, C5, C7, включенные последовательно с катушками подвеса верхнего статора 9 и C2, C4, C6, C8, включенные последовательно с катушками подвеса нижнего статора 10. В одну диагональ мостовых схем D1, D2, D3, D4, D5, D6, D7, D8 включено питание подвеса через катушки подвеса и резонансные конденсаторы, в другую диагональ - четырехполюсники Z1(p), Z2(p), Z3(p), Z4(p).
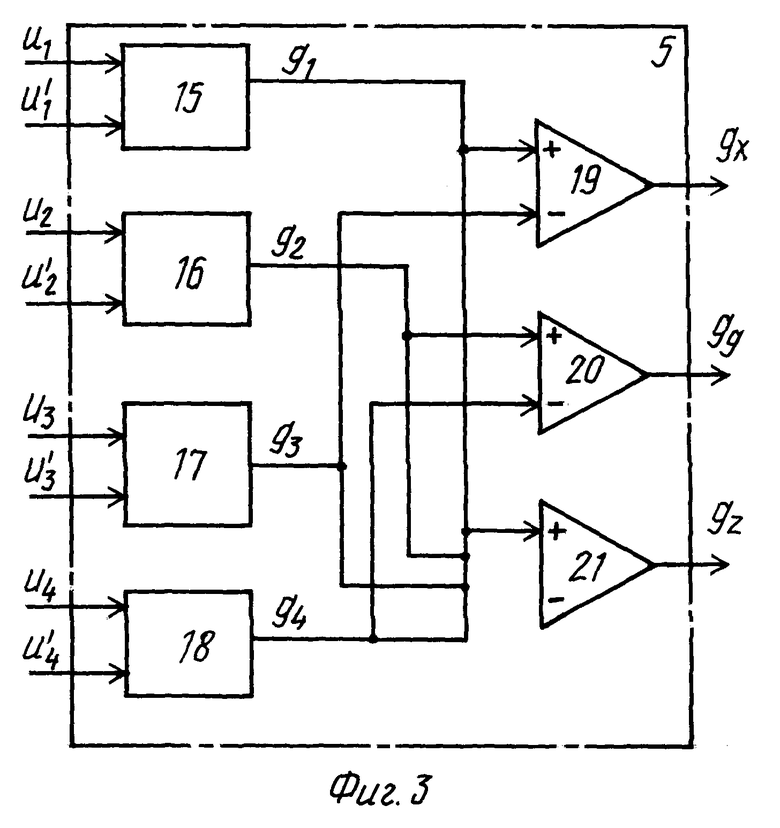
Схема блока 5 выработки составляющих ускорения (фиг. 3) действующего по осям гироскопа содержит входные сумматоры 15, 16, 17, 18, которые подключены параллельно входам четырехполюсников Z(p) схемы подвеса. Выходы сумматоров 15, 16, 17 и 18 соединены со входами усилителей-преобразователей 19, 20 и 21. Сумматоры и усилители-преобразователи могут быть выполнены на микросхемах серии 140 УД17 и резисторах.
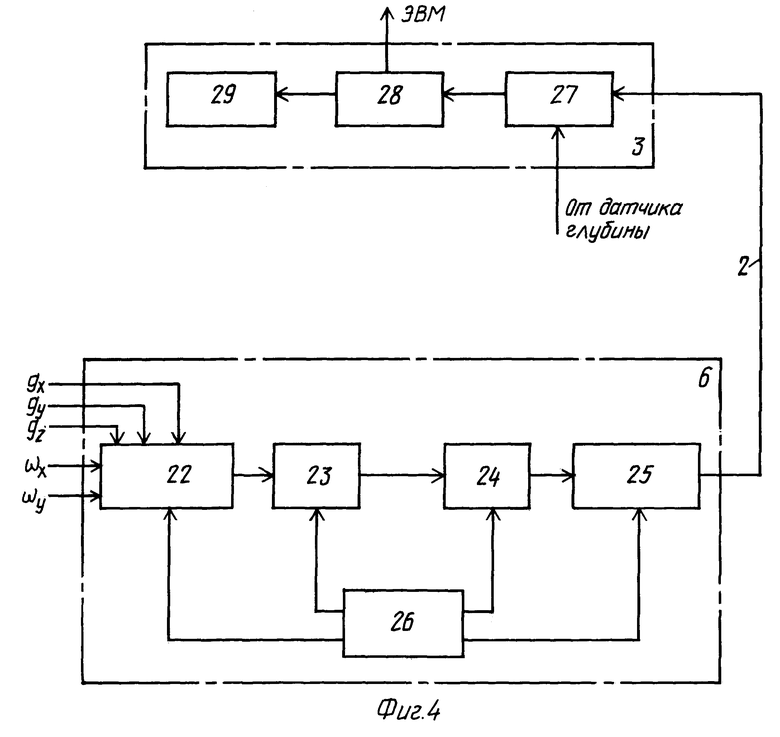
Передающее устройство 6 (фиг. 4) содержит последовательно соединенные мультиплексор 22, аналого-цифровой преобразователь (АЦП) 23, регистр 24 и передатчик 25 измеренных величин. Первый второй и третий входы мультиплексора 22 подключены к выходам усилителей-преобразователей 19, 20 и 21 блока 5 выработки составляющих ускорения. Четвертый и пятый входы мультиплексора 22 подключены к нагрузочным сопротивлениям 14 канала датчик угла - датчик момента магнитосферического гироскопа 4. Шестой вход мультиплексора 22 подключен к первому входу блока 26 управления режимами работы, второй третий и четвертый выходы которого соединены с вторыми входами АЦП 23, регистра 24 и передатчика 25 измеренных величин соответственно.
Мультиплексор 22 может быть выполнен на микросхемах серии 590КН5. АЦП 23 выполнен по схеме двойного интегрирования, известной, например, из У.Титце, К. Шенк "Аналого-цифровые преобразователи двойного интергирования", раздел 24.4 на элементах серий 544УД2А, 521СА3, 564ИЕ10В, К72П-6. Регистр 24 выполнен на микросхемах серии 564ИР9В. Передатчик 25 измеренных величин реализован на микросемах серии 564ИЕ10В, 564ИР9В, 564ТМ2В, 564ЛА7, 588ВГ3. Блок 26 управления выполнен на микросхемах 564ЛА7, 564ЛЕ5, 564ТМ2, 564ЛН2, 564ИЕ9, 564ЛП2.
Наземный прибор 3 (фиг. 4) состоит из последовательно соединенных контролера 27 приема данных, вычислителя 28 и блока индикации 29. Первый вход контроллера приема соединен с каротажным кабелем 2, второй вход - с датчиком глубины (на схеме не показан). Схема контролера собрана на микросхемах серии 564ТЛ1, 564ЛН2, 564ИР9, 564ИЕ10, 588ВГ3, 564ЛА7, 564ЛА9, 564ИД1, 564ТМ2, 564КП2, 521СА3, 564АЕ5.
Вычислитель 28 входом соединен с выходом контроллера 27 приема данных, а выходами с блоком индикации 29 и внешней ЭВМ (на схеме не показана). Вычислитель 28 выполнен на микросхемах серии КР1816ВЕ51, 573РФ4А, 573РУ10, 1533АР5, 1533АР6, 1533ИР22, 1533ЛН1, 1533ЛА3, 1533ЛП8.
Блок 29 индикации содержит три индикационных табло, реализованных на семисегментных индикаторах типа АЛС324, регистр хранения данных, реализованный на микросхемах 564ИР2, 564ЛН2. На одном табло отображается глубина точки останова инклинометра, на втором и третьем табло - вычисленные в вычислителе 28 зенитный угол и азимут наклона оси скважины.
Гироскопический инклинометр работает следующим образом. Скважинный прибор 1 устанавливается в устье скважины. На магниторезонансный подвес 8 ротора 7 гироскопа 4, используемого в режиме датчика угловой скорости, действуют только составляющие ускорения силы тяжести и на входы сумматоров 15, 16, 17 и 18 блока 5 с каждого из двух входов корректирующих контуров подаются напряжения U1, U2, U3, U4 верхнего подвеса 9 и  нижнего подвеса 10. Выходные напряжения сумматоров масштабируются пропорционально составляющим ускорения, действующим по осям гироскопа. На выходах усилителей-преобразователей 19, 20 и 21 получаем проекции действующих ускорений по ортогональным осям гироскопа X,Y,Z:
нижнего подвеса 10. Выходные напряжения сумматоров масштабируются пропорционально составляющим ускорения, действующим по осям гироскопа. На выходах усилителей-преобразователей 19, 20 и 21 получаем проекции действующих ускорений по ортогональным осям гироскопа X,Y,Z:
qx=Kx(q1-q3),
qy=Ky(q2-q4),
qz=Kz(q1+q2+q3+q4)
где qx, qy, qz - проекции действующего ускорения по осям основания гироскопа;
Kx, Ky, Kz - коэффициенты, определяемые при тарировке и устанавливаемые на усилителях - преобразователях;
q1, q2, q3, q4 - проекции действующего ускорения на осях подвеса, пропорциональные измеренной разности напряжений.
С выходов усилителей-преобразователей 19, 20, 21 в виде аналоговых напряжений полученные величины составляющих ускорения силы тяжести gx, gy, gz поступают на первый, второй и третий входы мультиплексора 22, а на четвертый и пятый входы мультиплексора 22 поступают также в виде аналоговых напряжений измеренные величины угловой скорости вращения Земли ωx,ωy. Блок управления 26 открывает по очереди ключи мультиплексора 22, и на вход АЦП 23 поступает аналоговое напряжение, пропорциональное измеренным величинам, которые складываются с величинами уходов нуля АЦП 23, и в виде 12-разрядного двоичного последовательного кода запоминаются в регистре 24. В следующем такте блок 26 управления режимами работы выдает команду СДВ на регистр 24, по которой двоичный код измеренной величины выдается в передатчик 25 измеренных величин, в котором преобразуется в помехоустойчивый код "Манчестер-2", усиливается выходным усилителем передатчика 25 и выдается в одножильный кабель 2.
В наземном приборе 3 контроллер 27 приема данных дешифрует принятую последовательность и вместе с величиной глубины, полученной с датчика глубины, побайтно передает в вычислитель 28. Вычислитель 28 наземного прибора 3 по измеренным данным вычисляет:
1. Зенитный угол скважины в точке останова по формуле:
где gx, gy, gz - проекция ускорения силы тяжести на оси приборной системы координат.
2. Азимут наклона ствола скважины в точке останова:
при Z≤70o,
где ϕ - - широта места расположения скважины,
ω - - угловая скорость вращения Земли,
ωx, ωy - - проекции скорости вращения скважинного прибора в инерциальном пространстве на оси приборной системы координат.
Если Z >70o, то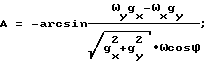
3. Угол поворота инклинометра: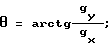
Измерения проводятся через 10 - 20 метров глубины с остановкой скважинного прибора в каждой точке на 1,5 - 3,0 минуты. Результаты вычислений азимута и зенитного угла для каждой точки индицируются на блоке индикации 29, а также выдаются по отдельной шине в формате RS-232 на отдельную ЭВМ для создания банка данных и отображения положения оси скважины в пространстве на экране дисплея.
Предлагаемый гироскопический инклинометр не требует начальной выставки и не имеет соответствующих ошибок, так как для определения азимута наклона ствола скважины использует аналитическое построение направления. Трудоемкость изготовления предлагаемого инклинометра в 2-3 раза ниже трудоемкости изготовления прототипа. Проведенные натурные испытания подтвердили высокую точность и надежность инклинометра.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ТРАЕКТОРИИ СКВАЖИНЫ ПО АЗИМУТУ И ДВУХРЕЖИМНЫЙ БЕСПЛАТФОРМЕННЫЙ ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2269001C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЗЕНИТНЫХ И АЗИМУТАЛЬНЫХ УГЛОВ СКВАЖИН | 2011 |
|
RU2459951C1 |
| СПОСОБ КОМПЕНСАЦИИ ИНЕРЦИОННОЙ ПОГРЕШНОСТИ ГИРОКОМПАСА ПРИ МАНЕВРИРОВАНИИ СУДНА И ГИРОКОМПАС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1997 |
|
RU2128822C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1996 |
|
RU2100594C1 |
| СПОСОБ НАЧАЛЬНОЙ АЗИМУТАЛЬНОЙ ВЫСТАВКИ СКВАЖИННОГО ПРИБОРА ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА И АЗИМУТАЛЬНЫЙ МОДУЛЬ | 2012 |
|
RU2501946C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1999 |
|
RU2159331C1 |
| Способ определения зенитного угла и азимута скважины и гироскопический инклинометр | 2018 |
|
RU2682087C1 |
| ИНКЛИНОМЕТР | 2003 |
|
RU2250371C1 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2528105C2 |
| БЕСКАРДАННЫЙ ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР И СПОСОБ ВЫРАБОТКИ ИНКЛИНОМЕТРИЧЕСКИХ УГЛОВ | 1994 |
|
RU2101487C1 |
Инклинометр предназначен для измерения пространственной ориентации оси буровой скважины. Наземный прибор связан каротажным кабелем со скважинным прибором, включающим магнитосферический трехстепенной гироскоп. В скважинный прибор дополнительно введены последовательно соединенные блок выработки составляющих ускорения и передающее устройство. Входы блока выработки подключены параллельно входам четырехполюсников по каждой оси подвеса ротора трехстепенного гироскопа, а выходы блока выработки соединены с первым, вторым и третьим входами передающего устройства, четвертый и пятый входы которого подключены параллельно нагрузочным сопротивлениям канала датчик угла - датчик момента по двум измерительным осям гироскопа. Выход передающего устройства подключен через каротажный кабель к наземному прибору. Передающее устройство содержит последовательно соединенные мультиплексор, аналого-цифровой преобразователь, регистр и передатчик измеренных величин, а также блок управления. Наземный прибор содержит контроллер приема измеренных величин, вычислитель и блок индикации. Первый вход контроллера приема подключен к каротажному кабелю, второй вход - к датчику глубины, выход контроллера соединен со входом вычислителя, а вычислитель первым выходом подключен к блоку индикации, вторым -- к внешней ЭВМ. Обеспечивается минимизация количества измерительных устройств, входящих в состав инклиномера, что позволяет уменьшить его габариты и расширить функциональные возможности, а также снизить стоимость. 2 з.п.ф-лы, 4 ил.
| RU 2004786C1, 15.12.93 | |||
| ГИРОИНКЛИНОМЕТР | 1994 |
|
RU2078204C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА СКВАЖИНЫ В ПОСЛЕДОВАТЕЛЬНЫХ ТОЧКАХ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1991 |
|
RU2030574C1 |
| RU 2064163C1, 20.07.96 | |||
| В.Х.Исаченко | |||
| Инклинометрия скважин | |||
| - М.: Недра, 1987, с.78 - 83. | |||
