Изобретение относится к измерительной технике и может быть использовано для определения осевой собственной частоты вынужденных колебаний роторов силовых гироскопов массой до 40 кг, а также для определения предварительной осевой нагрузки на шарикоподшипниковые опоры силовых гироскопов по осевой собственной частоте вынужденных колебаний ротора.
Известно устройство для измерения предварительной осевой нагрузки в подшипниках роторов методом определения резонансной частоты колебаний подшипника, состоящее из подвеса для подшипника, механизма создания предварительной нагрузки на подшипник, механизма возбуждения колебаний, датчика вибраций (см. патент US №6286374, кл. F16C 25/08, G01L 5/00, 1999 г.).
Недостатки известного технического решения заключаются в том, что данное устройство имеет ограниченную область использования, так как применяется только для измерения осевой нагрузки подшипников опоры ротора открытого типа и не может быть использовано для вибрационной диагностики герметичных роторов силовых гироскопов, а также для определения осевой резонансной частоты колебаний и предварительного натяга в шарикоподшипниковых опорах в условиях вакуума и широкого диапазона температур.
Известно устройство измерения перемещения подвижной массы микромеханического гироскопа по оси колебаний, содержащее генератор переменного напряжения, соединенный с проводящей подвижной массой. Преобразователи ток - напряжение устройства выполнены в виде трансрезистивных усилителей на операционных усилителях с резисторами, включенными между выходом и инвертирующим входом операционных усилителей. Многоканальный аналого-цифровой преобразователь (АЦП) соединен входами с генератором переменного напряжения, выходами операционных усилителей, а его выход соединен с процессором. Подвижная масса в центральной части имеет гребенчатую структуру. Статоры, расположенные рядом с гребенками, образуют дифференциальный емкостной датчик перемещения подвижной массы по оси первичных колебаний и гребенчатый двигатель. Со статорами соединены входы и выходы устройства возбуждения первичных колебаний, выход которого соединен с входом АЦП. Соединенные попарно статоры с электродами, находящимися на подвижной массе, образуют дифференциальный емкостной датчик с плоскопараллельными электродами.
В процессе работы устройство возбуждения колебаний при совместной работе с электродной структурой вызывает колебания подвижной массы вдоль оси Х с постоянной амплитудой. Под действием кориолисовых ускорений подвижная масса начинает колебаться вдоль оси Y. Эти колебания приводят к изменениям емкостей между электродами. Учитывая, что инвертирующий вход усилителей, охваченных отрицательной обратной связью с помощью резисторов, имеет нулевой потенциал, можно считать, что все напряжение источника приложено к плоскопараллельным электродам. Сигналы, поступающие на входы АЦП, преобразуются в коды, которые обрабатываются процессором. Реализация вычислений, связанных с определением разности и произведения двух величин и последующего деления одной величины на другую, достаточно легко может быть выполнена современными контроллерами или другими средствами цифровой техники (см. патент РФ №2296301, кл. G01C 19/56, 2007 г. - наиболее близкий аналог).
Недостаток этого устройства заключается в том, что его применение возможно только для микромеханических гироскопов, известное техническое решение определяет величину перемещения подвижной массы только перпендикулярно оси вынужденных колебаний микромеханического гироскопа. Конструкция устройства не позволяет проводить вибрационную диагностику герметичных роторов силовых гироскопов, не обеспечивает регистрацию и вывод значения осевой собственной частоты колебаний ротора, а также величины предварительной осевой нагрузки в шарикоподшипниковых опорах при вращающемся роторе, в условиях вакуума, различных температурах.
Техническим результатом настоящего изобретения является расширение функциональных возможностей установки измерения собственной частоты колебания силовых гироскопов и повышение точности измерений, за счет:
- определения и контроля осевой собственной частоты вынужденных колебаний ротора частотным методом по разности между фазой возбуждающей силы и фазой сигнала с вибропреобразователя;
- создания на подвесе без переустановки различных условий испытания (давление, температура, вибрационное воздействие) для определения осевой и радиальной собственных частот вынужденных колебаний ротора силового гироскопа;
- расположения измерительного вибропреобразователя и возбудителя вибрации снаружи вакуумной камеры, что исключает влияния воздействия температуры и давления в камере;
- определения предварительной осевой нагрузки в шарикоподшипниковых опорах ротора силового гироскопа по осевой собственной частоте вынужденных колебаний ротора;
- определения осевой и радиальной собственных частот вынужденных колебаний ротора силовых гироскопов и двигателей-маховиков при нулевой и рабочей скоростях вращения;
- контроля осевых и радиальных собственных частот вынужденных колебаний в вакууме, при положительных и отрицательных температурах, при нулевой и рабочей скоростях вращения ротора.
Указанный технический результат достигается тем, что в установке измерения собственной частоты колебаний роторов силовых гироскопов, содержащей магнитоэлектрические обратные преобразователи, связанные с системой подвеса для установки силового гироскопа, устройство возбуждения колебаний, систему управления работой установки, новым является то, что установка оснащена вакуумной камерой с крышкой, магнитоэлектрические обратные преобразователи размещены на корпусе вакуумной камеры, а система подвеса - в вакуумной камере, причем установка оснащена системой вакуумирования камеры и системой терморегуляции полости камеры, размещенной в крышке камеры, при этом, система терморегуляции состоит из элементов Пельтье и радиаторов, на которых установлены вентиляторы, причем элементы Пельтье и приводы вращения вентиляторов имеют возможность соединения с системой управления.
Сущность изобретения поясняется чертежами, на которых:
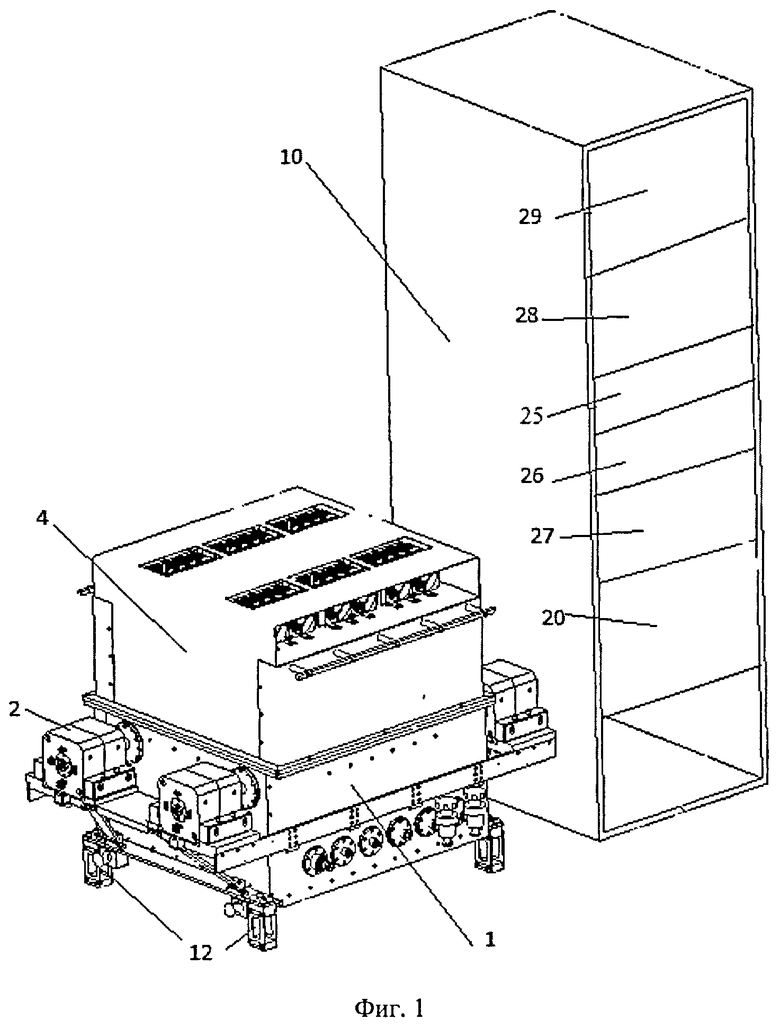
- на фиг.1 изображена установка измерения собственной частоты колебаний силовых гироскопов, включая стойку с электронно-вычислительным оборудованием;
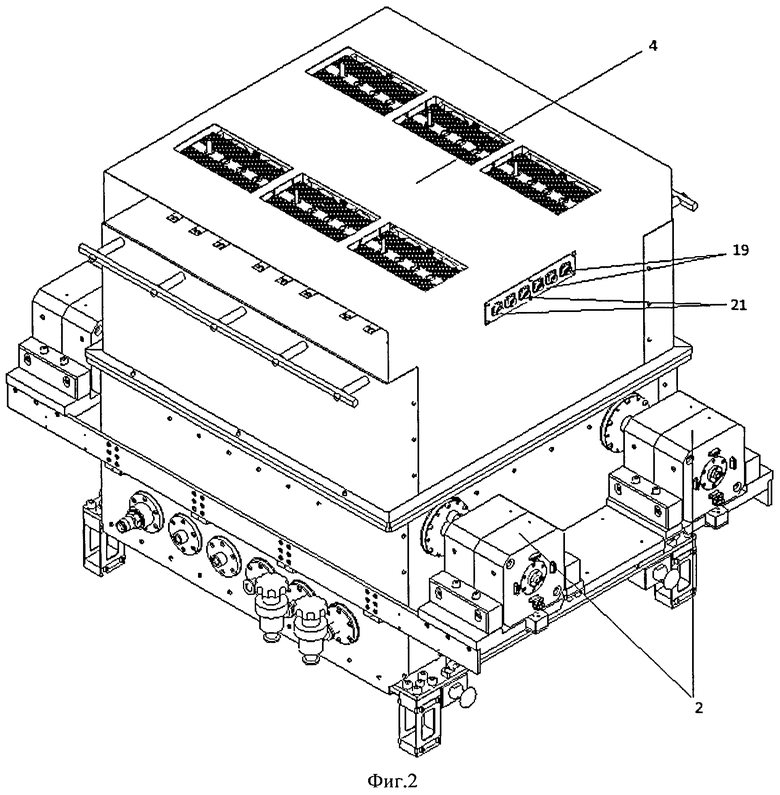
- на фиг.2 изображен изометрический вид механической части установки.
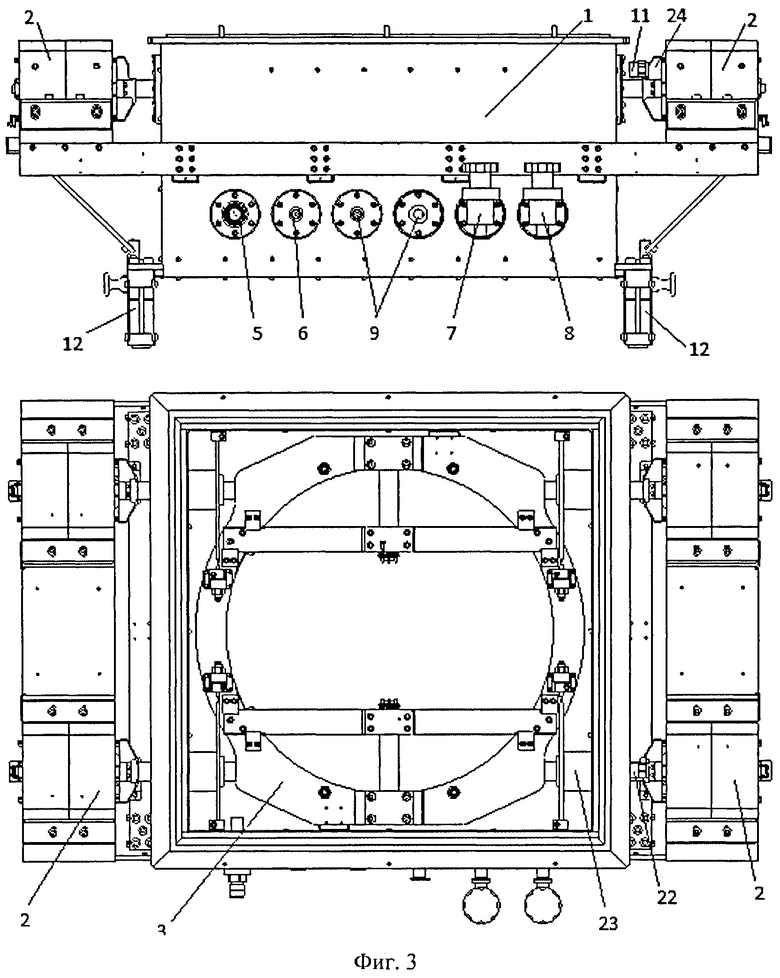
- на фиг.3 изображен вид спереди и вид сверху механической части установки без крышки;
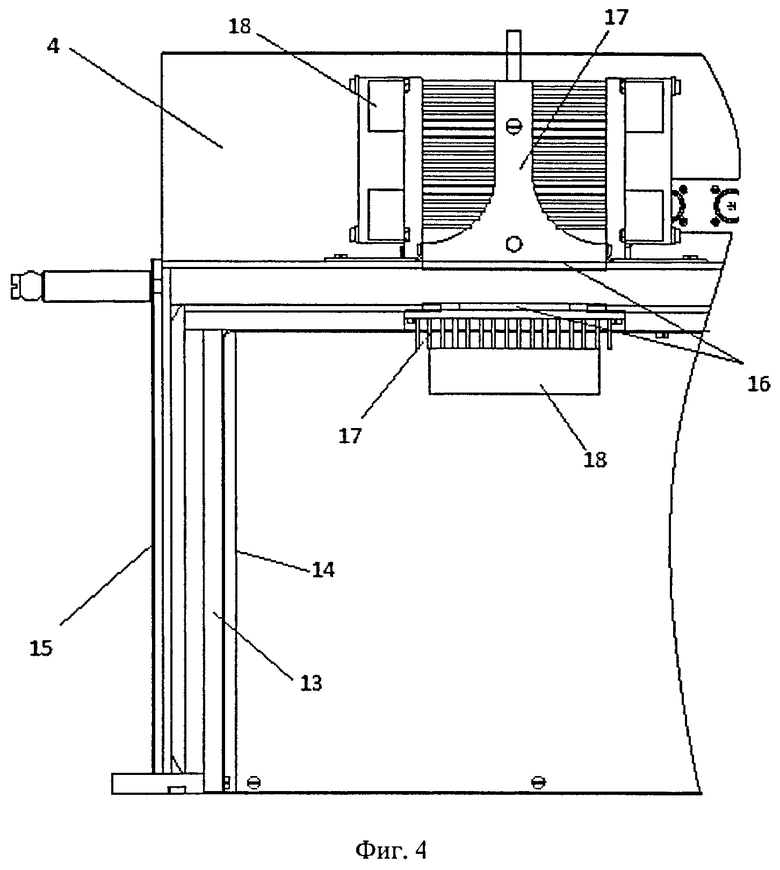
- на фиг.4 изображено сечение крышки установки;
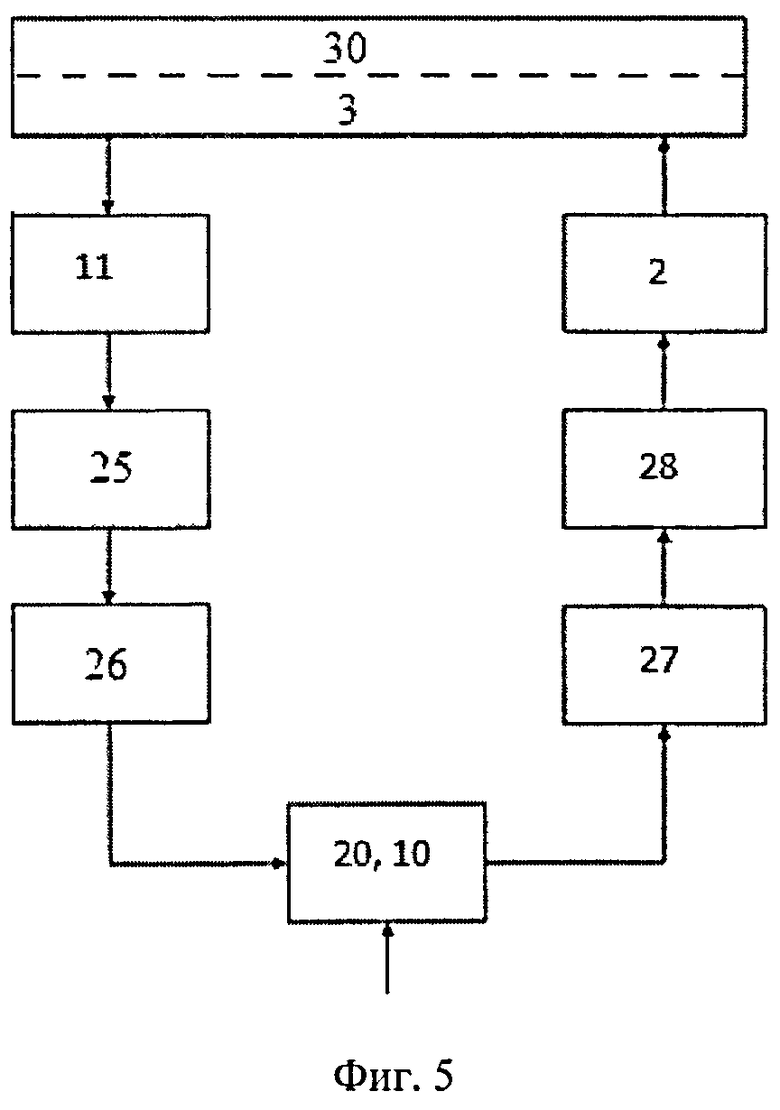
- на фиг.5 изображена структурная схема установки.
Установка оснащена системой управления (СУ), которая:
- в системе терморегулирования управляет источниками питания элементов Пельтье и вентиляторов;
- в системе вакуумирования и контроля вакуума позволяет следить за уровнем давления внутри камеры с помощью датчиков давления и выводить на экран рекомендации оператору по управлению вакуумным насосом;
- в системе создания вибраций задает амплитуду управляющего воздействия, диапазон частот и шаг, с которым происходит воздействие возбуждающей силы на подвес;
- от системы регистрации вибраций СУ получает данные с вибропреобразователя со встроенной электроникой через АЦП для анализа и определения осевой собственной частоты.
Установка измерения собственной частоты колебаний роторов силовых гироскопов содержит вакуумную камеру 1 (фиг.1), на наружных боковых поверхностях которой размещены четыре магнитоэлектрических обратных преобразователя (МЭОП) 2, систему подвеса 3, размещенную в вакуумной камере 1, систему терморегуляции, расположенную в крышке 4 вакуумной камеры. На корпусе вакуумной камеры имеются: вводы в вакуумную камеру разъемов для чувствительных элементов датчиков давления 5 и температуры 6; ручные клапаны для откачки 7 и подачи воздуха 8; разъемы 9 для питания силового гироскопа. В комплект установки входит стойка 10 с электронно-вычислительным оборудованием (система управления). Установка оснащена вибропреобразователем 11. Вакуумная камера установлена на опорах 12.
Внутренние и внешние стенки вакуумной камеры 1 и крышки 4 покрыты теплоизолятором 13 и закрыты кожухами 14 и 15.
Система терморегуляции, установленная в крышке 4 вакуумной камеры, состоит из элементов Пельтье 16, радиаторов 17, расположенных сверху элементов Пельтье и внутри крышки под элементами Пельтье, вентиляторов 18, установленных на радиаторы 17 и оснащенных приводами вращения. Элементы Пельтье 16 через разъем 19 соединены с блоком управления 20 системы управления, установленным на стойке 10. Приводы вращения вентиляторов 18 через разъемы 21 соединены с блоком управления 20.
МЭОП 2 связаны с системой подвеса 3 через толкатели 22 и упругие герметичные элементы 23.
Вибропреобразователь 11 установлен на фланце 24 МЭОП 2 и связан через блок питания 25 вибропреобразователя с АЦП 26, установленным на стойке 10.
На стойке 10 также размещены генератор 27, усилитель мощности 28, источник питания 29 для вентиляторов и элементов Пельтье.
Контролируемый объект (силовой гироскоп) обозначен позицией 30.
Установка измерения собственной частоты колебаний роторов силовых гироскопов работает следующим образом.
В зависимости от требований испытаний конкретного контролируемого объекта 30 возможно шесть вариантов использования установки измерения собственной частоты:
- испытания силового гироскопа без нагрева с вакуумированием;
- испытания силового гироскопа с нагревом с вакуумированием;
- испытания силового гироскопа с охлаждением с вакуумированием;
- испытания силового гироскопа с нагревом без вакуумирования;
- испытания силового гироскопа с охлаждением без вакуумирования;
- испытания силового гироскопа без нагрева без вакуумирования.
В общем случае определение величины осевой собственной частоты колебаний ротора силового гироскопа на установке проводится в следующей последовательности:
1. Подготовка установки к проведению испытаний. Подготовка включает в себя: включение в сеть всех агрегатов установки, размещенных на стойке 10, включение блока управления 20.
2. Установка на силовой гироскоп технологического приспособления для закрепления силового гироскопа. Операция включает в себя установку вручную технологического приспособления для закрепления силового гироскопа.
3. Установка контролируемого объекта 30 на подвес вакуумной камеры. Операция включает в себя установку силового гироскопа с помощью технологического приспособления на систему подвеса 3.
4. Герметизация камеры. Герметизация камеры включает в себя установку крышки 4 на вакуумную камеру 1 и затяжку винтов между этими агрегатами.
5. Нагрев/охлаждение контролируемого объекта 30 до заданной температуры. Через блок управления 20 включение источника питания 29 для элементов Пельтье 15 и вентиляторов 18. Далее снимается информация о температуре с чувствительного элемента датчика температуры 6, которая обрабатывается системой управления. При достижении температуры внутри камеры заданного значения через блок управления 20 происходит отключение источника питания 29 для элементов Пельтье 15 и вентиляторов 18. Система терморегуляции обеспечивает нагрев полости вакуумной камеры до +50°C и охлаждение ее до -20°С.
6. Вакуумирование камеры. Вакуумирование камеры включает в себя открытие ручного клапана 7 для откачки воздуха, включение вакуумного насоса на откачивание воздуха из камеры. Далее снимается информация о давлении внутри камеры с чувствительного элемента датчика давления 5, которая обрабатывается системой управления. При достижении заданного испытаниями значения давления, выключается вакуумный насос, закрывается клапан 7 откачки воздуха.
7. Включение силового гироскопа. Операция включает в себя подачу питания на разъем 9 для питания силового гироскопа.
8. Предварительное определение осевой собственной частоты колебаний ротора силового гироскопа.
9. Окончательное определение осевой собственной частоты колебаний ротора.
10. Контроль измеренного значения осевой собственной частоты колебаний ротора силового гироскопа с паспортным значением.
11. Подготовка системы к извлечению силового гироскопа включает в себя выключение всех агрегатов установки, размещенных на стойке 10, кроме блока управления 20. Открывается клапан для подачи воздуха 8. Далее снимается информация о давлении внутри камеры с чувствительного элемента датчика давления 5, которая обрабатывается системой управления 10. При достижении значения давления, равного давлению в цеху, в котором проводятся испытания, закрывается клапан для подачи воздуха 8.
12. Извлечение контролируемого объекта 30 из установки выполняется в следующей последовательности: открутить винты между крышкой 4 и вакуумной камерой 1, снять крышку 4, подождать, когда температура в цеху и температура в камере выравняются, извлечь силовой гироскоп с помощью технологического приспособления. Выключение всех электронно-вычислительных приборов.
Работа установки для пунктов 8 и 9 основана на известном методе вынужденных колебаний [2-6]. Принцип ее построения и функционирования (фиг.5) заключается в следующем. Синусоидальное электрическое напряжение, дискретно регулируемое по частоте, подается от генератора 27 через усилитель мощности 28 на возбудитель механических колебаний 2 - магнитоэлектрический обратный преобразователь, который вызывает колебания контролируемого объекта 30 через систему подвеса 3. Колебания контролируемого объекта 30 воспринимаются вибропреобразователем 11, включающим в себя предварительный усилитель, подаются на АЦП 26 и далее в блок управления 20, в котором вычисляется разность между фазой возбуждающей силой и фазой реакции на возбуждение и определяется осевая собственная частота по переходу через 90° полученной фазовой характеристики.
Сравнивая измеренное значение осевой собственной частоты колебаний ротора силового гироскопа с паспортным значением, определенным при изготовлении прибора на стадии выставки осевого натяга шарикоподшипникового узла, можно судить о величине предварительной осевой нагрузки на разных стадиях производства.
Изобретение позволяет определять и регистрировать осевую собственную частоту вынужденных колебаний ротора силового гироскопа, а также контролировать величину предварительной осевой нагрузки на различных этапах сборки силовых гироскопов, в условиях вакуума, высоких и низких температур, при вращающемся роторе силового гироскопа, что расширяет функциональные возможности проведения вибрационных испытаний силовых гироскопов. Данная установка позволит повысить точность характеристик разрабатываемых силовых гироскопов.
ЛИТЕРАТУРА
1. Патент US 6286374 B1 F16C 25/08; G01L 5/00; G01M 13/02; (IPC1-7): G01L1/10 "Preload measuring apparatus of rolling bearing" NSK LTD, США, з-ка US 19990437901 09.11.1999, публ. 11.09.2001.
2. Вибрации в технике. Справочник в 6-ти т./Ред. совет: В.Н.Челомей (пред.). - М.: Машиностроение, 1981 - Т.5. Измерения и испытания. - Под ред. М.Д.Генкина. 1981, 496 с., ил.
3. Механика шарикоподшипников гироскопов/В.Ф.Журавлев, В.Б.Бальмонт; под ред. Д.М.Климова. - М.: Машиностроение, 1985. - 272 с., ил.
4. Гироскопические системы. Учеб. пособие для вузов по специальности «Гироскопические приборы и устройства»/Е.А.Никитин, Е.А.Шестов, В.А.Матвеев.; под ред. Д.С.Пельпора. - 3-я часть. - М.: Высш. школа», 1972. - 472 с., ил.
5. Технология производства гироскопических приборов/Б.А.Хохлов, П.В.Сыроватченко, Е.П.Чернышев, В.В.Ильин. - М.: Машиностроение, 1969. - 416 с., ил.
6. Опоры и подвесы гироскопических устройств/М.П.Ковалев. - М.: Машиностроение, 1970. - 286 с., ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТЕНД КОНТРОЛЯ ОСЕВОЙ НАГРУЗКИ УЗЛА ШАРИКОПОДШИПНИКОВЫХ ОПОР РОТОРОВ СИЛОВЫХ ГИРОСКОПОВ И ДВИГАТЕЛЕЙ-МАХОВИКОВ | 2015 |
|
RU2608719C1 |
| ИЗМЕРИТЕЛЬ ПРОСТРАНСТВЕННЫХ ВИБРАЦИЙ | 2010 |
|
RU2454644C1 |
| Способ уменьшения вибрационных погрешностей гироплатформы на динамически настраиваемых гироскопах | 2020 |
|
RU2750180C1 |
| СПОСОБ ПРИВЕДЕНИЯ РОТОРА ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА (ЭСГ) В РАБОЧИЙ РЕЖИМ | 2001 |
|
RU2187787C1 |
| СПОСОБ ГИДРОДИНАМИЧЕСКОГО ПОДВЕСА РОТОРА ГИРОМОТОРА ПОПЛАВКОВОГО ГИРОСКОПА (ВАРИАНТЫ) И СПОСОБ ЗАПОЛНЕНИЯ ЦИЛИНДРИЧЕСКОГО ГИДРОДИНАМИЧЕСКОГО ПОДВЕСА РОТОРА ГИРОМОТОРА ПОПЛАВКОВОГО ГИРОСКОПА НЕСМЕШИВАЮЩИМИСЯ ЖИДКОСТЯМИ | 2004 |
|
RU2272252C1 |
| Устройство для коррекции осевых дисбалансов динамически настраиваемых гидроскопов в вакууме | 1982 |
|
SU1073587A1 |
| ДАТЧИК УГЛОВОЙ СКОРОСТИ С ТРЕХКРАТНОЙ МОДУЛЯЦИЕЙ ПОЛЕЗНОГО СИГНАЛА НА БАЗЕ МОДУЛЯЦИОННОГО ГИРОСКОПА С ИНДУКЦИОННЫМ ИЗМЕРИТЕЛЕМ МОДУЛЯЦИИ | 2008 |
|
RU2389031C1 |
| ПОЛУАВТОМАТИЧЕСКИЙ БАЛАНСИРОВОЧНЫЙ СТАНОК | 2012 |
|
RU2515102C1 |
| СТЕНД КОНТРОЛЯ МЕХАНИЧЕСКИХ ПАРАМЕТРОВ ГИРОСКОПОВ | 2007 |
|
RU2363930C1 |
| ДАТЧИК УГЛОВОЙ СКОРОСТИ НА БАЗЕ МОДУЛЯЦИОННОГО ГИРОСКОПА | 2004 |
|
RU2276773C2 |
Изобретение относится к измерительной технике и может быть использовано для определения осевой собственной частоты вынужденных колебаний роторов силовых гироскопов. Установка содержит магнитоэлектрические обратные преобразователи, связанные с системой подвеса для установки силового гироскопа, устройство возбуждения колебаний, систему управления работой установки. Также установка оснащена вакуумной камерой с крышкой, магнитоэлектрические обратные преобразователи размещены на корпусе вакуумной камеры, а система подвеса в вакуумной камере. Причем установка оснащена системой вакуумирования камеры и системой терморегуляции полости камеры, размещенной в крышке камеры. При этом система терморегуляции состоит из элементов Пельтье и радиаторов, на которых установлены вентиляторы, элементы Пельтье и приводы вращения вентиляторов имеют возможность соединения с системой управления. 1 з.п ф-лы, 5 ил.
1. Установка измерения собственной частоты колебаний роторов силовых гироскопов, содержащая магнитоэлектрические обратные преобразователи, связанные с системой подвеса для установки силового гироскопа, устройство возбуждения колебаний, систему управления работой установки, отличающаяся тем, что установка оснащена вакуумной камерой с крышкой, магнитоэлектрические обратные преобразователи размещены на корпусе вакуумной камеры, а система подвеса - в вакуумной камере, причем установка оснащена системой вакуумирования камеры и системой терморегуляции полости камеры, размещенной в крышке камеры.
2. Установка по п.1, отличающаяся тем, что система терморегуляции состоит из элементов Пельтье и радиаторов, на которых установлены вентиляторы, причем элементы Пельтье и приводы вращения вентиляторов имеют возможность соединения с системой управления.
| СПОСОБ ИЗМЕРЕНИЯ ПЕРЕМЕЩЕНИЯ ПОДВИЖНОЙ МАССЫ МИКРОМЕХАНИЧЕСКОГО ГИРОСКОПА ПО ОСИ ВТОРИЧНЫХ КОЛЕБАНИЙ И УСТРОЙСТВО ДЛЯ РЕАЛИЗАЦИИ ДАННОГО СПОСОБА | 2005 |
|
RU2296301C1 |
| US 6286374 B1 11.09.2001; | |||
| ДАТЧИК УГЛОВОЙ СКОРОСТИ НА БАЗЕ МОДУЛЯЦИОННОГО ГИРОСКОПА | 2004 |
|
RU2276773C2 |
| ДАТЧИК УГЛОВОЙ СКОРОСТИ С ТРЕХКРАТНОЙ МОДУЛЯЦИЕЙ ПОЛЕЗНОГО СИГНАЛА НА БАЗЕ МОДУЛЯЦИОННОГО ГИРОСКОПА С ИНДУКЦИОННЫМ ИЗМЕРИТЕЛЕМ МОДУЛЯЦИИ | 2008 |
|
RU2389031C1 |

