г
Л
| название | год | авторы | номер документа |
|---|---|---|---|
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД С НЕУПРАВЛЯЕМЫМ ЗВЕНОМ ПОСТОЯННОГО ТОКА | 1993 |
|
RU2067352C1 |
| Электропривод с частотно-токовым управлением | 1987 |
|
SU1495973A1 |
| Вентильный электропривод | 1989 |
|
SU1746482A1 |
| СПОСОБ УПРАВЛЕНИЯ ТРЕХФАЗНЫМ ИНВЕРТОРОМ НАПРЯЖЕНИЯ С ШИМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2091979C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2020724C1 |
| Частотно-управляемый электропривод | 1988 |
|
SU1552334A1 |
| СИСТЕМА УПРАВЛЕНИЯ ПРЕОБРАЗОВАТЕЛЕМ ЧАСТОТЫ С ПРЯМЫМ УПРАВЛЕНИЕМ ТОКОМ | 2016 |
|
RU2642819C2 |
| Устройство для управления электродвигателем | 1987 |
|
SU1633475A1 |
| СПОСОБ УПРАВЛЕНИЯ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 2004 |
|
RU2276451C1 |
| Электропривод переменного тока | 1988 |
|
SU1767689A1 |
Изобретение относится к электротехнике и может быть использовано в регулируемых электроприводах с синхронными двигателями. Целью изобретения является улучшение энергетических показателей и точности электропривода в широком диапазоне частоты вращения. Указанная цель достигается тем, что блок 8 регулирования зоны воспроизведения тока снабжен последовательно соединенными преобразователем 9 частота вращения-код, постоянным запоминающим устройством 10 с возможностью реализации специальной зависимости и цифроаналоговым преобразователем 11, блок управления б силовым преобразователем 3 снабжен распределителем импульсов 12, а компаратор 7 выпол-- нен управляемым. При этом обеспечивается автоматическое поддержание суммарных дополнительных потерь в электродвигателе и силовом i преобразователе на минимальном уровне во всем диапазоне регулирования частоты вра.щения. Уменьшение ширины токового коридора с ростом частоты вращения приводит к повышению точности регулирования фазных токов. 1 ил. (Л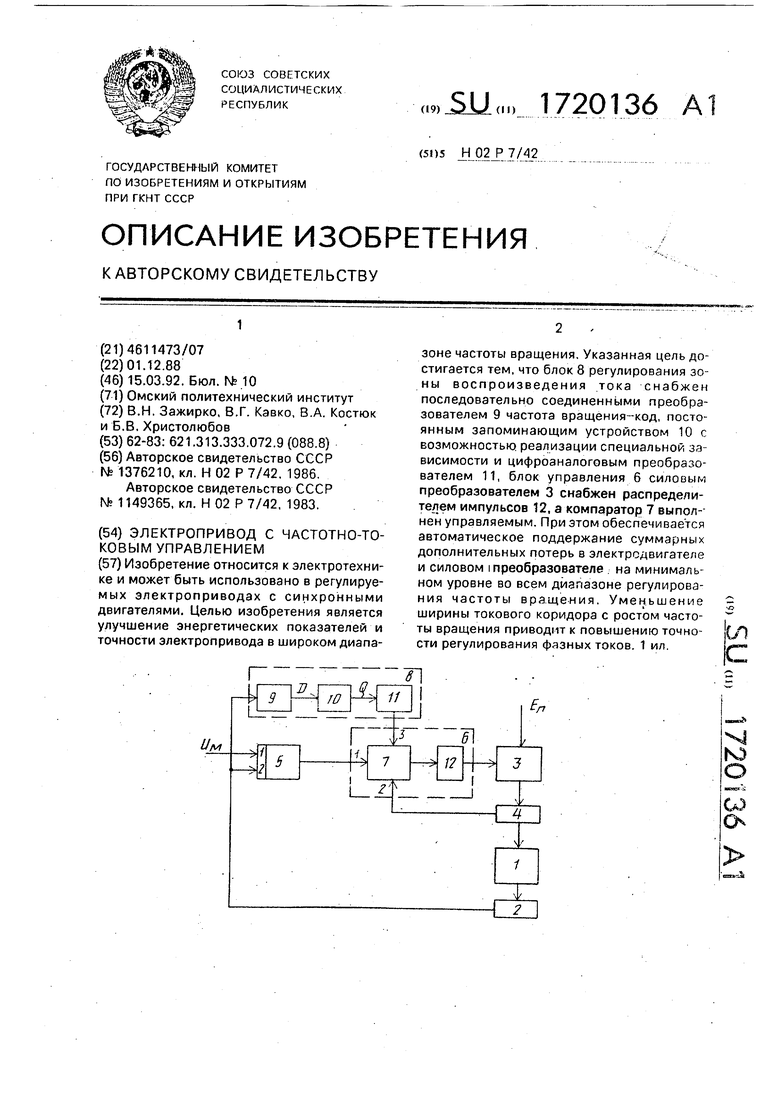
{.-
ю о
| неявг-э:
Ся
Изобретение относится к электротехнике и может быть использовано в регулируемых электроприводах с синхронными двигателями, например, для автономных установок, где определяющими являются энергетические показатели.
Цель изобретения - улучшение энергетических показателей и точности электропривода в широком диапазоне регулирования частоты вращения.
Начертеже изображена структурная схема предлагаемого электропривода,
Электропривод содержит синхронный двухфазный электродвигатель 1 с установленным на его валу датчиком обратной связи 2, силовой преобразователь 3, выходы которого через датчик фазных токов 4 подключены к обмоткам электродвигателя 1, формирователь опорного синусоидального сигнала 5, первый вход которого предназначен для подачи задающего сигнала, второй вход подключен к выходу датчика обратной связи 2, а выход формирователя опорного синусоидального сигнала 5 подключен к первому входу блока управления 6 силовым преобразователем 3, выполненного с компаратором 7 и соединенного вторым входом с выходом датчика фазных токов 4, блок регулирования зоны воспроизведения тока 8, соединенный входом с выходом датчика обратной связи 2, а выходом - с третьим входом блока управления 6 силовым преобразователем 3. При этом блок регулирования зоны воспроизведения тока 8 содержит последовательно соединенные преобразователь частота вращения - код 9, постоянное запоминающее устройство 10 и цифроаналоговый преобразователь 11, блок управления 6 силовым преобразователем 3 содержит распределитель импульсов 12, выход которого образует выход названного блока 6, а компаратор 7 выполнен управляемым, причем его два входа и управляющий вход образуют соответственно первый, второй и третий входы блока управления 6 силовым преобразователем 3.
Электропривод работает следующим образом.
При подаче задающего сигнала, определяющего требуемую величину момента электродвигателя 1, на выходе формирователя опорного синусоидального сигнала 5 возникает сигнал, задающий требуемые фазные токи электродвигателя 1, Для реализации частотно-токового управления электродвигателем 1 обеспечивается изменение сигнала заданий фазных токов в синусоидальной функции угла поворота вала с помощью датчика обратной связи 2, подключенного ко второму входу формирователя опорного синусоидального сигнала 5.
Компаратор 7 в блоке управления 6 силовым преобразователем 3 осуществляет
пофазное сравнение сигнала заданий фазных токов и сигнала с выхода датчика фазных токов 4 и имеет симметричную релейную характеристику с гистерезисом, равным 2 А г. Выходные сигналы компаратора 7 через распределитель импульсов 12 обеспечивают переключение ключей силового преобразователя 3. В результате действия обратной связи по фазным токам возникает режим релейного регулирования
фазных токов электродвигателя 1, при этом токи в фазах отличаются от заданных на величину пульсирующей составляющей, амплитуда которой постоянна и определяется шириной токового коридора Д ir, а частота
изменяется. ..Ширина токового коридора Д|г в предлагаемом электроприводе регулируется автоматически с помощью блока регулирования зоны воспроизведения тока 8.
Частота сигнала датчика обратной связи 2 Тд, прямо пропорциональная частоте вращения са вала электродвигателя 1
тд-КдШ,(1)
преобразуется с помощью преобразователя
частота-код 9.во входной код D постоянного запоминающего устройства 10
0 Мд -КпКдШ,(2).
выходной код Q которого поступает на цифроаналоговый преобразователь 11. Текущее
значение выходного сигнала цифроаналого- вого преобразователя 11 определяет величину сигнала на управляющем входе компаратора 7 и тем самым ширину токового коридора:
Д1г КцО.(3)
В результате в процессе работы электропривода осуществляется функциональная связь ширины токового коридора с частотой вращения швала электродвигателя 1. Вид функциональной зависимости определяется видом функции Q(D), записанной в постоянном запоминающем устройстве 10. В предлагаемом электроприводе функция Q(D) определена из условия
минимума суммарных дополнительных потерь в двигателе 1 и силовом преобразователе 3 во всем диапазоне регулирования частоты вращения следующим образом. Дополнительные потери от пульсаций
токов в обмотках электродвигателя 1 пропорциональны квадрату ширины токового коридора Д1Г:
Рд«-д-Д1(Рф + 2Рк). (4)
где Рф, RK - соответственно активные сопротивления фазной обмотки электродвигателя 1 и открытого силового ключа силового преобразователя 3.
Потери на переключение силовых клю- чей силового преобразователя 3, усредненные за период фазного тока, обратно пропорциональны величине токового коридора А 1г:
Й1„
(5)
D lfn Ј
Рп ЗЦ,А|Г (1 ах где Еп - напряжение питания инверторов силового преобразователя 3,
Im - амплитуда фазного тока электродвигателя 1,
Ц - индуктивность фазной обмотки электродвигателя 1,
Гк - время включения (выключения) силового ключа силового преобразователя 3,
Углах - Еп (Се -ИтКф)2 +((У)2
/
Д1. fafl-V Е 1тГкР () ,6) ЛМСУ У4 1ф ( Рф + 2 RK ) W
Се - конструктивный параметр электродвигателя 1 (коэффициент противоЭДС),
Р - число пар полюсов электродвигателя 1.
Согласно (4), (5) для минимума суммарных дополнительных потерь необходимо регулировать ширину токового коридора Air в функции частоты вращения соло закону
з
Отсюда с учетом (1) - (3) определяем функцию Q(D), которую необходимо реализовать в постоянном запоминающем устройстве 10
----
Q VK(1-(aD + b)2-cP2) , (7)
где константы К, а, Ь, с зависят от параметров электродвигателя 1, силовых ключей си- левого преобразователя 3, коэффициентов преобразования датчика обратной связи 2-Кд , преобразователя частотэ-код 9 -Кп и цифроаналогового преобразователя 11 Кц
En Im Tjc Кц
41ф(Т ф+2Рх)
. а
Кп Кд ЕП
№
Кп
UlmP
Rn Еп
Таким образом, при реализации в постоянном запоминающем устройстве 10 функции Q(D) вида (7) в предлагаемом элек5
10
20
25
30
35
0
5
0
5
троприводе обеспечивается автоматическое поддержание суммарных дополнительных потерь в электродвигателе 1 и силовом преобразователе 3 на минимальном уровне во всем диапазоне регулирования частоты вращения, что улучшает энергетические по казатели электропривода. Уменьшение ширины токового коридора с ростом частоты вращения приводит к повышению точности регулирования фазных токов электродвигателя 1 а, следовательно, и точности электропривода в целом.
Формула изобретения Электропривод с частотно-токовым управлением, содержащий синхронный двухфазный электродвигатель с установленным на его валу датчиком обратной связи, силовой преобразователь, выходы которого через датчик фазных токов подключены к обмоткам электродвигателя, формирователь опорного синусоидального сигнала, первый вход которого предназначен для подачи задающего сигнала, второй вход подключен к выходу датчика обратной связи, а выход формирователя опорного синусоидального сигнала подключен к первому входу блока управления силовым преобразователем, выполненного с компаратором и соединенного вторым входом с выходом датчика фазных токов, блок регулирования зоны воспроизведения тока, соединенный входом с выходом датчика обратной связи, а выходом - с третьим входом блока управления силовым преобразователем, отличающийся тем. что/ с целью улучшения энергетических показателей и точности в широком диапазоне регулирования частоты вращения вала электродвигателя, блок регулирования зоны воспроизведения тока снабжен последовательно соединенными преобразователем частота вращения - код, постоянным запоминающим устройством и цифроанзлого- вым преобразователем, блок управления силовым преобразователем снабжен распределителем импульсов, выход которого образует выход названного блока, а компаратор выполнен управляемым, причем его два входа и управляющий вход образуют соответственно первый, второй и третий входы блока управления силовым преобразователем, выход компаратора подключен к входу распределителя импульсов, з постоянное запоминающее устройство блока регулирования зоны воспроизведения тока выполнено с возможностью реализации следующего соотношения:
(1-(aD + b)2-cD2) .
где Q, D - выходной и входной сигналы указанного устройства, К.а.Ь.с - константы, определяемые параметрами основных узлов электропривода:
Е2 | . уЗ n lm к .ц
4 Ц, ( Рф + 2 R )
( UbnP 2 КпКдЕп
где Кд - коэффициент преобразования датчика обратной связи (по частоте вращения), Кп, Кц - соответственно коэффициенты преобразования преобразователя частота - код и цифроаналогового преобразователя,
Еп - напряжение источника питания силового преобразователя,
Гк - время включения (выключения) ключевых элементов силового преобразовате- ля,
RK - активное сопротивление открытого ключевого элемента силового преобразователя,
Рф, Ц - активное сопротивление и ин- дуктивность фазной обмотки электродвигателя,
Р - число пар полюсов электродвигателя,
С« - конструктивный параметр электро- двигателя (коэффициент противоЭДС),
lm - амплитуда фазного тока электродвигателя.
| Способ формирования гармонических токов в фазах частотно-управляемого электродвигателя и устройство для его осуществления | 1986 |
|
SU1376210A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Пневматический водоподъемный аппарат-двигатель | 1917 |
|
SU1986A1 |
| Авторское свидетельство СССР № 1149365, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
