Изобретение относится к электротехнике и может быть использовано для управления тяговыми асинхронными электродвигателями в частности в электроприводе электромобиля.
Цель изобретения - повышение экономичности и эффективности рекуперативного торможения.
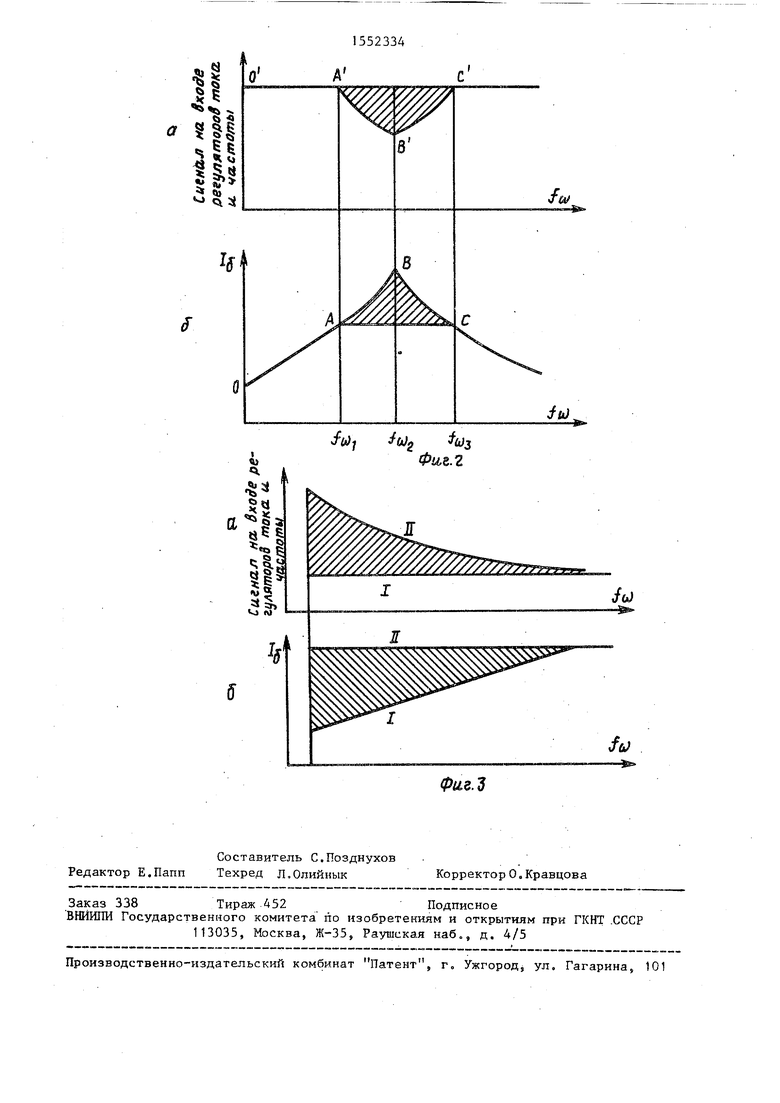
На фиг. 1 приведена структурная схема электропривода; на фиг. 2 и 3 - диаграммы, поясняющие его работу.
Частотно-управляемый электропривод, содержит тяговый асинхронный
1
электродвигатель 1, преобразователь 2 частоты, датчик 3 частоты вращения, переключатель k тяга - торможение, регулятор 5 тока, регулятор 6 частоты вращения, блок 7 управления преобразователем частоты, датчик 8 тока статора, блок 9 формирования кода управления, задатчик 10 момента, умножающий цифроаналоговый преобразователь 11. Выводы статорной обмотки тягового асинхронного электродвигателя 1 соединены с выходами преобразователя 2 частоты, силовой вход которого подключен к первичному источнику питания - аккумуляторной батарее 12. Выход датчика 8 тока статора соединен с первым входом регулятора 5 тока. Выход датчика 3 частоты вращения соединен с первым входом
о
регулятора 6 частоты вращения, второй вход которого соединен с первым выходом переключателя 4 тяга - торможение, второй выход которого подключен к первому входу блока 9 формирования кода управления, второй вход которого соединен с выходом датчика 3 частоты вращения. Выходы блока 9 формирования кода управления и задатчика 10 момента соединены сооветственно с первым и вторым входами умножающего цифроаналогового преобразователя 11, первый и второй выход которого соединены соответственно с третьим входом регулятора 6 частоты вращения и вторым входом регулятора
5тока. Выходы регулятора 6 частоты вращения и регулятора 5 тока соединены соответственно с первым и вторым входами блока 7 управления преобразователем 2 частоты.
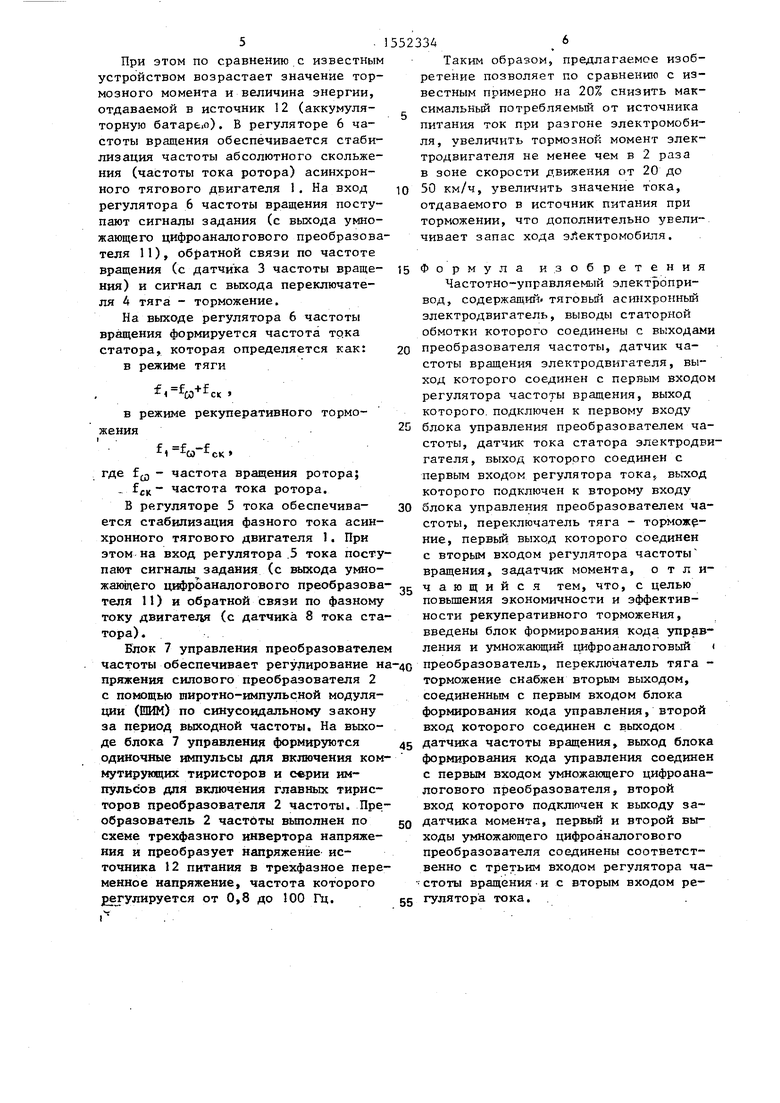
На фиг. 2 и 3 показаны сигналы на входах регулятора 5 тока и регулятор
6частоты вращения, поступающие с умножающего цифроаналогового преобразователя 11: кривая О1 Л В С и кри
5
0
5
0
5
0
5
0
5
вая II соответственно для режимов тяги и торможения (прямая О1 А1С и прямая I соответствуют известному устройству) , а также кривые изменения тока источника питания 1р - кривая ОАС и прямая II соответственно для режимов тяги и торможения (кривая ОАВС и кривая I соответствуют режимам работы известного устройства).
Электропривод работает следующим образом.
В режиме тяги при наличии сигнала на выходе задатчика 10 момента с выходов умножающего цифроаналогового преобразователя 11 на входы регулятора 6 частоты и регулятора 5 тока поступают задающие воздействия определяемые как величиной сигнала задатчика 10 момента, так и частотой вращения двигателя 1. Одновременное регулирование уставок фазного тока и абсолютного скольжения, определяемое сигналом на выходе умножающего цифроаналогового преобразователя 11, обеспечивает частотно-токовое регулирование двигателя 1 по минимуму (Ъазного тока. При этом потери в природе минимальны.
При значениях частоты вращения двигателя 1 в диапазоне от 0 до f (фиг. 2) сигнал на выходе умножающего цифроаналогового преобразователя 11 определяется сигналом на выходе задатчика 10 момента и неизменен от частоты.
При значениях частоты вращения двигателя 1 в диапазоне от fw блок 9 формирования кода управления обеспечивает изменение сигнала на выходе умножающего цифроаналогового преобразователя 11 при максимальном значении напряжения на выходе задатчика 10 момента в соответствии с кривой A B G . При этом обеспечивается меньшее по сравнению с известным устройством потребление тока источника 12 питания (аккумуляторной батареи) . В режиме рекуперативного торможения блок 9 формирования кода управления, воздействуя на умножающий цифроаналоговый преобразователь 11, обеспечивает изменение сигналов задания момента на входах регуляторов 5 тока и 6 частоты вращения в соответствии с кривой II (фиг. 3) при максимальном значении сигнала на выходе задатчика 10 момента.
51
При этом по сравнению с известным устройством возрастает значение тормозного момента и величина энергии, отдаваемой в источник 12 (аккумуляторную батарел). В регуляторе 6 частоты вращения обеспечивается стабилизация частоты абсолютного скольжения (частоты тока ротора) асинхронного тягового двигателя 1. На вход регулятора 6 частоты вращения поступают сигналы задания (с выхода умножающего цифрезналогового преобразователя П), обратной связи по частоте вращения (с датчика 3 частоты вращения) и сигнал с выхода переключателя А тяга - торможение.
На выходе регулятора 6 частоты вращения формируется частота тока статора, которая определяется как: в режиме тяги
f« fco+f«
в режиме рекуперативного торможенияi
где { - частота вращения ротора; . fЈK- частота тока ротора.
В регуляторе 5 тока обеспечивается стабилизация фазного тока асинхронного тягового двигателя 1. При этом на вход регулятора 5 тока поступают сигналы задания (с выхода умножающего цифроаналогового преобразователя 11) и обратной связи по фазному току двигателе (с датчика 8 тока статора) .
Блок 7 управления преобразователем частоты обеспечивает регулирование на пряжения силового преобразователя 2 с помощью тиротно-импульсной модуляции (ШИМ) по синусоидальному закону за период выходной частоты. На выходе блока 7 управления формируются одиночные импульсы для включения коммутирующих тиристоров и серии импульсов для включения главных тиристоров преобразователя 2 частоты. Преобразователь 2 частоты выполнен по схеме трехфазного инвертора напряжения и преобразует напряжение источника 12 питания в трехфазное переменное напряжение, частота которого регулируется от 0,8 до 100 Гц.
52334 6
Таким образом, предлагаемое изобретение позволяет по сравнению с известным примерно на 20% снизить максимальный потребляемый от источника
D
питания ток при разгоне электромобиля, увеличить тормозной момент электродвигателя не менее чем в 2 раза в зоне скорости движения от 20 до Ю 50 км/ч, увеличить значение тока, отдаваемого в источник питания при торможении, что дополнительно увеличивает запас хода электромобиля.
15 Формула изобретения Частотно-управляемый электропривод, содержащий тяговый асинхронный электродвигатель, выподы статорной обмотки которого соединены с выходами
20 преобразователя частоты, датчик частоты вращения электродвигателя, выход которого соединен с первым входом регулятора частоты пращения, выход которого подключен к первому входу
2G блока управления преобразователем частоты, датчик тока статора электродвигателя , выход которого соединен с первым входом регулятора тока, выход которого подключен к второму входу
30 блока управления преобразователем частоты, переключатель тяга - торможение, первый выход которого соединен с вторым входом регулятора частоты вращения, задатчик момента, о т л и35 чающийся тем, что, с целью повышения экономичности и эффективности рекуперативного торможения, введены блок формирования кода управления и умножающий цифрезналоговый 40 преобразователь, переключатель тяга - торможение снабжен вторым выходом, соединенным с первым входом блока формирования кода управления, второй вход которого соединен с выходом
45 датчика частоты вращения, выход блока формирования кода управления соединен с первым входом умножающего цифроаналогового преобразователя, второй вход которого подключен к выходу за0 датчика момента, первый и второй выходы умножающего цифроаналогового преобразователя соединены соответственно с третьим входом регулятора частоты вращения и с вторым входом ре55 гулятора тока.
If .L
«н и
to VO Ј:
A1
rw
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для частотного управления тяговым асинхронным электродвигателем | 1980 |
|
SU877768A1 |
| Частотно-управляемый асинхронный электропривод | 1984 |
|
SU1290464A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1758823A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 1999 |
|
RU2169426C1 |
| Электропривод переменного тока | 1986 |
|
SU1334342A1 |
| Способ управления асинхронным электроприводом и устройство для его осуществления (его варианты) | 1982 |
|
SU1164851A1 |
| Устройство для управления асинхронным электродвигателем | 1990 |
|
SU1734184A2 |
| Вентильный электропривод | 1989 |
|
SU1746482A1 |
| Устройство длля управления асинхронным электродвигателем | 1979 |
|
SU928583A1 |
| Вентильный электродвигатель | 1987 |
|
SU1508318A2 |
Изобретение относится к электротехнике и может быть использовано для управления тяговыми асинхронными электродвигателями, в частности в электроприводе электромобиля. Целью изобретения является повышение экономичности и эффективности рекуперативного торможения. Частотно-управляемый электропривод содержит тяговый асинхронный электродвигатель 1, преобразователь 2 частоты, датчик 3 частоты вращения, переключатель 4 тяга-торможение, регулятор 5 тока, регулятор 6 частоты вращения, блок 7 управления преобразователем частоты, датчик 8 тока статора, блок 9 формирования кода управления, задатчик 10 момента, умножающий цифроаналоговый преобразователь 11, источник питания /аккумуляторную батарею/ 12. За счет формирования сигналов управления преобразователем 2 частоты с помощью блока 9 формирования кода управления, умножающего цифроаналогового преобразователя 11, регуляторов тока 5 и частоты вращения 6 на основе сигналов по току статора, частоте вращения электродвигателя 1 и задатчика 10 момента обеспечивается снижение максимального потребляемого от источника 12 питания тока при разгоне электромобиля, увеличение тормозного момента в зоне скоростей движения от 20 до 50 км/ч, увеличение тока, отдаваемого в источник питания при торможении. 3 ил.
ч
4 «.
8 5«
«
SE
4е
Г
5 «o «M
Jtfj и) fuj Фиг.Ъ
(J
-
/
-
| Регулятор частоты для асинхронного тягового электропривода | 1982 |
|
SU1026275A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Зверев Г.А., Лувишис А.Л | |||
| и др | |||
| Электропривод электромобиля с асинхронным тяговым двигателем и аккумуляторным источником питания | |||
| Тезисы докладов Всесоюзной научно-техн | |||
| конф | |||
| Проблемы преобразовательной техники | |||
| - Киев, 1979, ч | |||
| III, .С | |||
| Пожарный двухцилиндровый насос | 0 |
|
SU90A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
