Изобретение относится к полупроводниковой преобразовательной технике и может быть использовано в тяговом асинхронном электроприводе с частотно-токовым управлением.
Известны способ и устройство управления преобразователей с широтно-импульсной модуляцией сигнала (патент США N 4629959, МКИ H 02 P 7/42, публ. 16.12.86 "Method and apparatus for controlling PWM inverter", приоритет Японии, заявка N 57-152622 от 03.09.1982, Hitachi, Ltd.).
Согласно указанному способу формируют токовые сигналы для управления токами отдельных фаз ШИМ-преобразователя. Для этого детектируют выходные токи отдельных фаз ШИМ-преобразователя и обеспечивают формирование выходных токов сигналов, характеризующих выходные токи. Формируют для отдельной фазы ШИМ-сигналы в соответствии с величиной и полярностью ошибки по току между токовыми управляющими и выходными управляющими сигналами.
Указанный способ управления реализуется устройством, которое содержит задатчик тока, контроллер скорости, усилители рассогласования сигналов, компараторы и выходные каскады, а также два датчика тока и датчик скорости, установленный на валу асинхронного электродвигателя с короткозамкнутым ротором.
Рассмотренные способ и устройство управления позволяют обеспечить способ двухполярной широтно-импульсной модуляции сигнала. При этом слежение за качеством тока нагрузки осуществляется на всем периоде частоты питания асинхронного двигателя одновременно во всех трех фазах.
Однако реализация такого способа и устройства управления преобразователем в тяговом электроприводе при мощности 150-400 кВт является весьма проблематичной. Это связано с малым значением индуктивности фазы асинхронного двигателя. Поскольку частота переключения вентилей преобразователя в таких системах обратно-пропорциональна индуктивности нагрузки при прочих равных условиях, то при использовании такого способа в тяговом электроприводе резко возрастают потери в инверторе вследствие повышенной частоты переключений, а также вступают в силу ограничения по времени коммутации, что приводит к снижению КПД преобразователя в целом и увеличению минимального реализуемого тока фазы.
Техническая задача состоит в снижении потерь в преобразователе путем снижения частоты переключений вентилей, в результате чего повышается КПД преобразователя и расширяется диапазон регулирования тока.
Задачу авторы предлагают решить способом управления трехфазным инвертором с ШИМ, согласно которому формируют фазовые сигналы задания тока; формируют сигналы, пропорциональные мгновенным значениям фазных токов нагрузки; формируют сигналы ошибки путем сравнения в каждой фазе сигнала задания тока и сигнала, пропорционального мгновенному значению тока нагрузки одноименной фазы; определяют знаки сигналов ошибки; в моменты перехода мгновенных фазных значений напряжения питания через нуль формируют импульсные фазовые сигналы; в соответствии с этими сигналами и сигналами, определяющими знак ошибки, формируют сигналы управления вентилями инвертора на 1/6 части периода питающего напряжения в каждой положительной и в каждой отрицательной полуволне тока каждой фазы нагрузки поочередно. При этом начальный момент слежения за током в каждой фазе одинаков.
Данный способ авторы предлагают реализовать с помощью устройства управления инвертором напряжения с ШИМ, подключенным входом к источнику постоянного тока, а выходом к асинхронному электродвигателю с короткозамкнутым ротором.
Устройство содержит датчик скорости, установленный на валу двигателя; два датчика тока, включенные в одну из двух фаз обмотки статора двигателя каждый; задатчик сигналов тока, контроллер скорости, три фазовых усилителя рассогласования сигналов, три компаратора и три выходных каскада, каждый из которых подключен к паре вентилей соответствующей фазы инвертора. Выход датчика скорости подключен к одному входу контроллера скорости, к другому входу которого подключен задатчик тока. Первые два выхода контроллера скорости подключены к усилителям рассогласования сигналов таким образом, что они соединены каждый с положительным входом соответствующего усилителя первых двух фаз и с одним из двух отрицательных входов усилителя третьей фазы. А с каждым из двух положительных входов третьего усилителя соединен выход соответствующего датчика тока. Кроме того, указанные выходы датчиков тока подключены, каждый к отрицательному входу соответственно первого и второго усилителя рассогласования сигналов. А выход каждого из трех указанных усилителей подключен к соответствующему фазному компаратору.
Дополнительно в устройство введено постоянное запоминающее устройство, к первым трем входам которого подключены соответствующие вторые три выхода контроллера скорости. К другим трем входам его подключены соответственно выходы компараторов. А выходы запоминающего устройства подключены каждый к соответствующему фазовому выходному каскаду.
Новым в предлагаемом способе является то, что одновременно с формированием фазовых сигналов задания тока и сигналов, пропорциональных мгновенным значениям фазных токов нагрузки, формируют в моменты перехода мгновенных фазных значений питающего напряжения через нуль импульсные фазные сигналы. И в соответствии с этими сигналами и с сигналами, определяющими знак ошибки между фазными сигналами задания тока и сигналами, пропорциональными мгновенным значениям фазных токов нагрузки, формируют сигналы управления вентилями. Причем эти сигналы формируют только на 1/6 части периода питающего напряжения в каждой положительной и в каждой отрицательной полуволне тока каждой фазы нагрузки поочередно, а начальный момент слежения за током в каждой фазе одинаков.
Новым в предлагаемом устройстве является то, что в него введено постоянное запоминающее устройство, с одной стороны подключенное к контроллеру скорости, а с другой стороны к компараторам. А выходы этого запоминающего устройства подключены к соответствующему фазовому выходному касаду каждый.
Это позволяет снизить частоту коммутаций тока в вентилях инвертора и тем самым снизить потери от переключений вентилей, а также расширить диапазон регулирования тока.
На основании вышеизложенного можно сделать вывод, что предлагаемые способ и устройство связаны между собой единым изобретательским замыслом. Сравнение заявляемых технических решений с прототипами позволяет установить соответствие их критерию "новизны". Кроме того, сказанное позволяет сделать вывод о наличии причинно-следственной связи между совокупностью существенных признаков и достигаемым техническим результатом.
На фиг. 1 приведена схема заявляемого устройства, с помощью которого реализуется заявляемый способ управления вентилями инвертора с ШИМ; на фиг. 2 диаграмма заданных и фактических токов фаз двигателя, трехфазная последовательность импульсных сигналов и диаграмма фазных управляющих сигналов тиристорами инвертора; на фиг. 3 диаграмма заданного и фактического тока фазы А в зоне слежения α; на фиг. 4 схема включения тиристоров инвертора в интервале слежения за током фазы А двигателя; на фиг. 5 структурная схема контроллера скорости.
Проследим реализацию предлагаемого способа управления трехфазным инвертором с ШИМ с помощью предлагаемого устройства (фиг.1).
Указанное устройство управления инвертором 1 напряжения с ШИМ, подключенным на входе (зажимы +, -) к источнику 2 постоянного тока, а на выходе (фазы a, b, c) к асинхронному электродвигателю 3 с короткозамкнутым ротором, содержит датчик 4 скорости, установленный на валу двигателя 3; два датчика 5 и 6 тока, включенные каждый в одну из двух фаз обмотки статора двигателя 3 (датчик 5 в фазу А, датчик 6 в фазу В). Кроме того, предлагаемое устройство содержит задатчик 7 сигналов тока, контроллер 8 скорости, три фазовых усилителя 9, 10 и 11 (фазы А, В, С) рассогласования сигналов; три компаратора 12, 13 и 14 и три выходных каскада 15, 16 и 17, каждый из которых выходами 18 и 19; 20 и 21; 22 и 23 подключен к паре вентилей 24 и 27; 25 и 28; 26 и 29 соответствующей фазы А, В, С инвертора (выходной каскад 15 выходами 18 и 19 подключен к вентилям 24 и 27 фазы А, выходной каскад 16 выходами 20 и 21 к вентилям 25 и 28 фазы В, выходной каскад 17 выходами 22 и 23 к вентилям 26 и 29 фазы С).
Выход 30 датчика скорости 4 подключен к одному (одноименному) входу 30 контроллера 8 скорости, к другому входу 31 которого подключен задатчик 7 сигналов тока.
Первые два выхода 32 и 33 контроллера 8 скорости подключены к усилителям 9, 10 и 11 рассогласования сигналов таким образом, что они соединены каждый с положительным входом 34 и 35 соответствующего усилителя 9 и 10 первых двух фаз А и В (выход 32 с положительным входом 34 усилителя 9 фазы А, выход 33 с положительным входом 35 усилителя 10 фазы В и с одним из двух отрицательных входов ( 36 и 37) усилителя 11 третьей фазы С ( выход 32 с отрицательным входом 36, а выход 33 с отрицательным входом 37). А с каждым из двух положительных входов 38 и 39 третьего усилителя 11 соединен одноименный выход соответствующего датчика 5 и 6 тока ( с положительным входом 38 выход 38 датчика 5, с положительным входом 39 выход 39 датчика 6).
Кроме того, указанные выходы 38 и 39 датчиков 5 и 6 тока подключены каждый к отрицательному входу 40 (41) соответственно первого 9 и второго 10 усилителя рассогласования сигналов (выход 38 датчика 5 к отрицательному входу 40 усилителя 9, а выход 39 датчика 6 к отрицательному входу 41 усилителя 10).
Выход 42 (43 и 44) каждого из трех 9 (10 и 11) указанных усилителей подключен к соответствующему компаратору 12( 13 и 14).
Дополнительно в него введено постоянное запоминающее устройство 45 (ПЗУ). К первым трем входам 46, 47 и 48 ПЗУ 45 подключены соответствующие вторые три выхода 46, 47 и 48 контроллера 8 скорости. К другим трем входам 49, 50 и 51 его подключены соответственно выходы одноименные компараторов 12, 13 и 14. А выходы 52, 53 и 54 запоминающего устройства 45 подключены каждый к соответствующему фазовому выходному каскаду 15, 16 и 17.
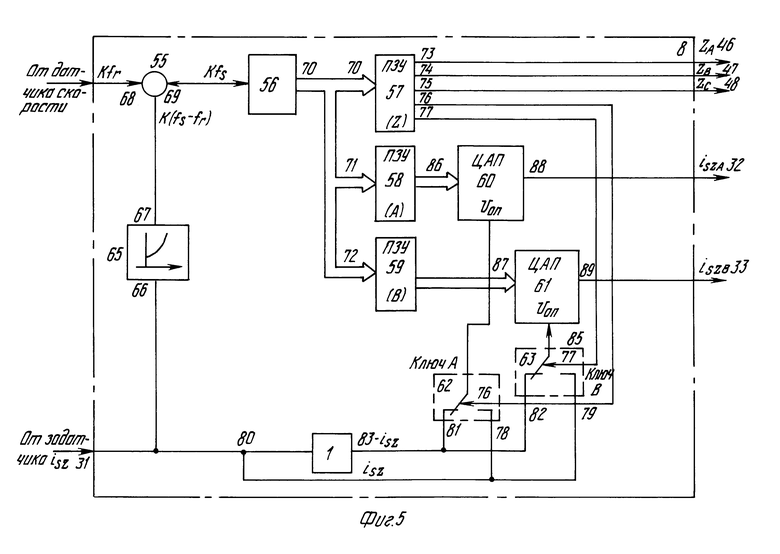
Контроллер 8 скорости включает в себя сумматоры 55 и 55 сигналов, счетчик 56 импульсов, второе 57, третье 58 и четвертое 59 постоянные запоминающие устройства, два цифроаналоговых преобразователя 60 и 61, два аналоговых ключа 62 и 63, инвертирующий усилитель 64 и функциональный преобразователь 65. Вход 66 последнего 65 является вторым входом 31 контроллера 8 скорости, а выход 67 указанного функционального преобразователя 65 подключен к первому входу 67 сумматора 55 сигналов. Второй вход 68 его является первым входом 30 контроллера 8 скорости. Выход 69 сумматора 55 сигналов подключен к счетному входу 69 счетчика 56 импульсов с коэффициентом счета, определяемым числом импульсов от датчика скорости и числом пар полюсов двигателя. Выход 70 указанного счетчика 56 подключен к входам 70, 71 и 72 соответственно второго 57, третьего 58 и четвертого 59 запоминающих устройств. Первые три выхода 73, 74 и 75 второго 57 запоминающего устройства являются вторыми тремя выходами 46, 47 и 48 контроллера 8 скорости трехфазные импульсные последовательности сигналов тока и скорости. Кроме того, два других выхода 76 и 77 второго 57 запоминающего устройства подключены каждый к управляющему входу 76 и 77 одного из двух аналоговых ключей 62 и 63. В каждом из последних второй вход 78 и 79 прямого сигнала соединен с входом 80 инвертирующего усилителя 64 и входом 66 функционального преобразователя 65. Третий вход 81 и 82 инверсного сигнала каждого из аналоговых ключей 62 и 63 подключен к выходу 83 инвертирующего усилителя 64. Выходы 84 и 85 указанных аналоговых ключей 62 и 63 соединены каждый с первым входом 84 и 85 соответственно одного из двух цифроаналоговых преобразователей 60 и 61. Второй вход 86 первого 60 из них подключен к выходу 86 третьего 58 запоминающего устройства. Второй вход 87 второго 61 из них подключен к выходу 87 четвертого 59 запоминающего устройства. А выходы 88 и 89 обоих цифроаналоговых преобразователей 60 и 61 являются соответственно первыми 32 и 33 двум выходами контроллера 8 скорости.
Кроме того, параллельно каждому тиристору 24-29 инвертора 1 фиг. 1 подключен свой обратный диод 90-95, а на входе инвертора 1 включен конденсатор 96 фильтра.
Датчик 4 скорости фиг. 1 общеизвестен и приведен, например, в техническом проекте ИДБМ. 566434 001 "Вагон метрополитена с тяговым асинхронным приводом. Комплект электрооборудования", М-Л, 1983.
В качестве датчиков 5 и 6 тока может быть применен модуль LEMT 500- S швейцарской фирмы LEM см. каталог "The answer is LEM" (Pioneering power electronies N 1, in innovation and production of isolated current and voltage transducters. 920131/2 LEM SA. Case postale 785121 Grand-Laney 1, Geneve, Switzerland.
Задатчик 7 сигнала может быть выполнен по схеме, приведенной в книге Башарин А. В. Новиков В.А. Соколовский Г. Г. Управление электроприводами. - Учебное пособие для вузов. Л. Энергоатомиздат, 1982.
Схема контроллера 8 скорости приведена в техническом проекте ИДБМ. 566434 001 Вагон метрополитена с тяговым асинхронным приводом комплект электрооборудования, М. Л, 1983.
Усилители 9, 10 и 11 рассогласования могут быть выполнены на базе стандартных ОУ, например, К 140УД6 или аналогичных им, см. справочник Аналоговые и цифровые интегральные микросхемы под ред. С. В. Якубовского. М. Радио и связь, 1984.
Компараторы 12, 13 и 14 могут быть выполнены на базе интегрального компаратора, например, К554САЗ.
Схема выходных каскадов 15, 16 и 17 приведена в техническом проекте ИДБМ 566434.001 Вагон метрополитена с тяговым асинхронным приводом. Комплект электрооборудования, М. Л. 1983.
ПЗУ 45 может быть выполнено на базе интегральной схемы КР 556РТ5, см. справочник Аналоговые и цифровые интегральные микросхемы под ред. С. В. Якубовского. М. Радио и связь, 1984.
Схемное решение сумматора 55 известно и может быть использовано из технического проекта ИДБМ. 566434.001 Вагон метрополитена с тяговым асинхронным приводом. Комплект электрооборудования, М. Л. 1983.
Счетчик 56 импульсов может быть выполнен на базе микросхем К555ИЕ10. Шило В.Л. Популярные цифровые микросхемы. Справочник. Челябинск: Металлургия, 1988.
Постоянные запоминающие устройства 57, 58 и 59, цифроаналоговые преобразователи 60 и 61, аналоговые ключи 62 и 63, инвертирующий усилитель 64 приведены в справочнике Аналоговые и цифровые интегральные схемы /под ред. С. В. Якубовского, М. Радио и связь. М. 1984.
Рассмотрим работу предлагаемого устройства, реализующего предлагаемый способ управления.
В задатчике 7 сигналов фиг. 1 вырабатывается сигнал, пропорциональный требуемому моменту на валу двигателя 3. Этот сигнал поступает на вход 31 контроллера 8 скорости. На вход 30 контроллера 8 скорости с одноименного выхода датчика 4 скорости поступает сигнал, пропорциональный скорости вращения ротора двигателя 3. В контроллере 8 скорости сигнал, поступающий по входу 31, преобразуется в два сигнала: один из них пропорционален заданному абсолютному скольжению. В результате после преобразований в контроллере 8 скорости на его выходах 32 и 33 появляются сигналы, пропорциональные фазным мгновенным значениям заданного тока: на выходе 32 isza заданный ток фазы А, на выходе 33 iszb заданный ток фазы В двигателя 3. При этом частота заданного тока, сформированного в контроллере 8 скорости, определяется суммой сигнала, пропорционального заданному абсолютному скольжению, и сигнала 30, пропорционального скорости вращения ротора.
Как и в прототипе, в данном устройстве измеряются и формируются токи только двух фаз А и В, а ток третьей фазы С определяется по известному соотношению:
iA + iB +iC 0
откуда
iC -iA iB.
В системах частотно-токового управления электроприводом наиболее часто применяются импульсные датчики скорости. На выходе такого датчика частота импульсов в "К" раз превышает частоту вращения вала двигателя "К" число прорезей или зубцов на диске датчика. Например, если вал вращается с частотой 1 Гц 1 об/с, то при 96 зубцах выходная частота равна К•fr 96 Гц, где fr частота вращения вала ротора двигателя.
В системах частотного управления обычно требуют, чтобы абсолютное скольжение т.е. разность между частотой питания двигателя и частотой вращения вала было постоянным:
fs-fr=const или K(fs-fr)=const
Тогда, зная величину К•fr, можно, просуммировав последнюю с величиной заданного абсолютного скольжения, а точнее с величиной, ему пропорциональной, определить величину, пропорциональную частоте питания двигателя. Именно эту функцию суммирования заданного скольжения и сигнала с выхода датчика скорости выполняет сумматор 55 фиг. 5.
Частота импульсов на выходе сумматора 55 равна К•fs, где fs частота питания двигателя 3.
Эти импульсы поступают на счетный вход 69 счетчика 56 импульса с коэффициентом пересчета равным K, причем каждый импульс на входе 69 увеличивает содержимое счетчика 56 на единицу от 0 до К-1. К-й импульс обнуляет счетчик и процесс повторяется. Иначе говоря, на выходе 70 счетчика 56 формируется цифровой код углового положения вектора фазного напряжения двигателя с дискретностью 2π /К.
Причем условно берем нулевое состояние счетчика за 0 эл. град. Кроме того, будем полагать, что в этот момент времени напряжение на фазе А двигателя напряжения сменит знак минус на плюс.
Чтобы сформировать трехфазную последовательность Za, Zб, Zc, подадим выходной код счетчика 56 на адресные входы 70 первого постоянного запоминающего устройства ПЗУ 57. Разряд Za этого ПЗУ 57 запрограммируем таким образом, чтобы по адресам от 0 до К/2-1 в нем была записана "1", а по адресам от К/2 до К-1 был записан "0". Разряд Zb сдвинем вправо по отношению к Za на 120 эл. град. или на К/3 шагов. Иначе говоря, в разряд Zb "1" начнем записывать, начиная с ячейки с номером К/3-1, причем количество ячеек, занятых под "1" аналогично Za, будет составлять К/2. Остальные ячейки разряда Zb занимаются нулями. Для разряда Zc поступим аналогично разряду Zb, сдвинув вправо содержимое его ячеек еще на К/3 шагов.
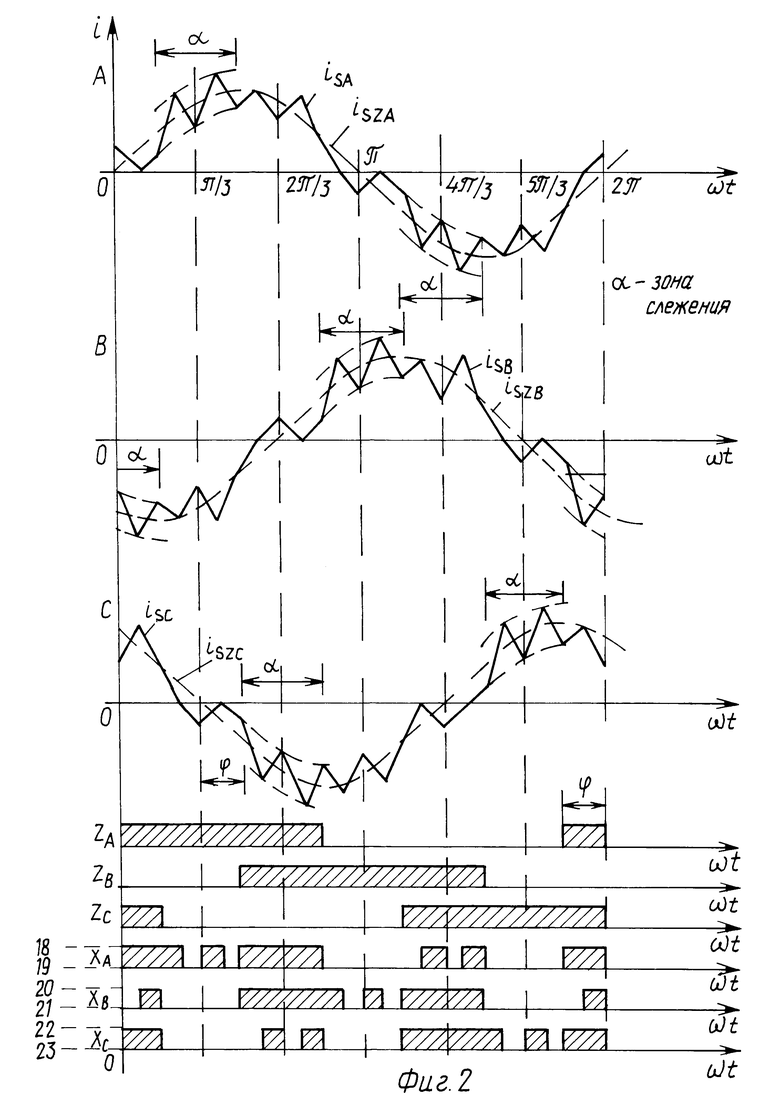
Одновременно в контроллере 8 скорости формируется трехфазная импульсная последовательность сигналов Za, Zb, Zc, опережающая синусоидальную последовательность заданных токов на некоторый фиксированный угол v фиг. 2. Величина этого угла выбирается согласно паспортному значению cosΦ двигателя 3, и обычно она находится в пределах 30 эл.град. Поскольку слежение за формой тока по предлагаемому способу осуществляется на интервале, ограниченном 1/6 частью периода и дважды за период, то на фиг. 2 этот интервал слежения показан, как a = π/3 Причем в каждой фазе зона слежения α имеет место в положительной и отрицательной полуволне тока по отношению к переходу синусоиды заданного тока через нуль зоны слежения a сдвинуты на угол v, а по отношению к импульсным сигналам Z зоны a расположены точно в середине полупериода.
Сигналы isza и iszb заданных токов А и В поступают в усилители 9, 10 и 11 фиг.1 рассогласования сигналов: по положительному входу 34 усилителя 9 - сигнал isza, по положительному входу 35 усилителя 10 сигнал iszb, по отрицательному входу 36 и 37 усилителя 11 соответственно сигналы isza и isza.
Одновременно на другие входы каждого из перечисленных усилителей 9, 10 и 11 с выходов 38 и 39 датчиков тока 5 и 6 поступают сигналы, пропорциональные текущим значениям фактического тока по фазам А и В двигателя, а именно: на отрицательный вход 40 усилителя 9 сигнал, пропорциональный фактическому току фазы А, на отрицательный вход 41 усилителя 10 сигнал, пропорциональный фактическому току фазы В, на положительные входы 38 и 39 сигналы соответственно.
Кроме ПЗУ 57, выходной код счетчика 56 поступает еще на адресные входы 71 и 72 двух ПЗУ 58 А и 59 В. Так как выходной код счетчика 56 есть, по сути, код углового положения, то при помощи ПЗУ 58 и 59 легко получать коды двух синусоид, сдвинутых на 120 эл.град. записывая по каждому адресу этих ПЗУ 58 и 59 дискретные значения синуса. Естественно, что таких значений будет столько, сколько значений принимает код счетчика 56, т.е. К. Таким образом, на выходах 86 и 87 ПЗУ 58 и 59 мы имеем К значений двух синусоидальных функций, сдвинутых по фазе, в виде цифровых кодов.
Далее при помощи двух цифроаналоговых преобразователей ЦАП 60 и 61 эти коды преобразуются в аналоговую форму, причем амплитуда этих сигналов должна быть равна величине заданного тока. Для этого аналоговый сигнал на входе 31 контроллера 8 скорости инвертируется в инвертирующем усилителе 64 с целью получения сигнала "-isz". Оба указанных сигнала, равные по модулю, но противоположные по знаку, поступают на аналоговые ключи 62 и 63. Ключи 62 и 63 подключают входы 84 и 85 опорного напряжения, соответствующего ЦАП 60 и 61 к зажимам 80 isz либо 83 "-isz" в зависимости от того, какая полуволна синусоиды формируется положительная или отрицательная. Управляются ключи 62 и 63 специальными сигналами 76 и 77 из ПЗУ 57, фронт и срез которых совпадает с переходом через нуль соответствующих цифровых синусоид.
Важным обстоятельством является то, что сигналы Za, Zb, ZC будут однозначно определять фазу основной гармоники фазных напряжений двигателя. Сигналы же isza, iszb на выходах 88 и 89 ЦАП 60 и 61 определяют основную гармонику фазного тока. Однако, как известно, при активно-индуктивной нагрузке каковой в первом приближении является асинхронный двигатель основная гармоника тока отстает по фазе от напряжения. Это необходимо учитывать при программировании рассматриваемого контроллера 8 скорости. Учет должен заключаться в том, что цифровые синусоиды в ПЗУ 58 и 59 должны быть сдвинуты вправо на необходимое число шагов, минимальное значение шага в нашем случае 2π /К. На такое же число шагов должны быть сдвинуты данные в разрядах, управляющие ключами 62 и 63 по отношению к данным Za, Zb, Zc.
В частотно-токовой системе управления электроприводом должна быть определена зависимость тока двигателя от величины абсолютного скольжения. Это может быть осуществлено с применением известных критериев оптимальности например, максимума момента или с наложением требуемых условий реализации характеристик например, постоянства магнитного потока. Для электропривода, предназначеннного для эксплуатации в условиях метрополитена наиболее употребим второй случай, с применением которого и рассчитывается искомая зависимость.
Поскольку двигатель охвачен глубокой отрицательной обратной связью потоку, то в статическом режиме будет наблюдаться равенство фактического и заданного токов статора, а значит рассчитанную кривую можно в полной мере отнести и к заданному току статора. Указанная зависимость реализуется функциональным преобразователем 65. Он может быть выполнен многими способами, в том числе табличным при помощи ПЗУ. Логические функции, которые реализуются в ПЗУ 45 имеют вид:
Xa=(Zb+Zc)•Ya+Za
Xb=(Za+Zc)•Yb+Zb
Xc=(Za+Zb)•Yc+Zc
где Xa, Xb, Xc выходные сигналы 52, 53, 54 ПЗУ 45;
Ya, Yb, Yc выходные сигналы 49, 50 и 51 кампараторов 12, 13 и 14;
+ знак суммы по модулю 2;
знак инверсии;
* знак логического умножения;
+ знак логического сложения.
В каждом усилителе 9, 10, 11 рассогласования определяется разность токов заданного и фактического:
Ek=[iszk(t)-isk(t)]
где К фазы А. B. C iszk текущее значение заданного тока фазы К;
isk(t) текущее значение фактического тока фазы К.
Таким образом, на выходах 42, 43 и 44 усилителей 9, 10 и 11 рассогласования появляются сигналы соответственно Ea, Eb, Ec, поступающие по одноименным входам 42, 43 и 44 в компараторы 12, 13 и 14, в каждом из которых определяется знак разности, а именно:
yk=sign Eк,
где к фазы A, B, C
В результате на входы 49, 50 и 51 постоянного запоминающего устройства ПЗУ 45 поступают сигналы соответственно
ya=sign Ea, yb=sign Eb, yc=sign Ec
Кроме того, на входы 46, 47 и 48 ПЗУ 45 с одноименных выходов 46, 47 и 48 контроллера 8 скорости поступают импульсные сигналы, соответственно Za, Zb, Zc.
В ПЗУ 45 в соответствии с заданным алгоритмом включения тиристоров 24-29 инвертора 1 из комбинации конкретных сигналов, поступающих в текущий момент времени по каналам 46, 49; 49, 50 и 48, 51 формируются сигналы 52, 53 и 54, поступающие в выходные каскады 15, 16 и 17, а с выходов указанных каскадов по каналам управления 18, 19; 20, 21 и 22, 23 тиристорами 24, 27; 25, 28; и 26, 29 соответственно фаз А, В, С поступает информация сигналы Xa, Xb, Xc о включении и выключении тиристоров.
Анализ комбинаций сигналов Zk и Yk, поступающих по каналам 46, 47, 48 и 49, 50 и 51 в ПЗУ, осуществляется заранее и по имеющемуся алгоритму переключений тиристоров для данного способа слежения за током позволяет определить значение Xk. Полученная таблица соответствия сигналов Zk, Yk и Xk заносится в ПЗУ 45.
Рассмотрим описанные процессы более подробно по диаграммам токов и сигналов управления, приведенным на фиг. 2 и 3.
Предварительно условимся считать, что "1" в сигналах Xk управления тиристорами фаз A, B, C означает открытие анодного тиристора соответствующей фазы, а "0" открытие катодного тиристора данной фазы.
На фиг. 3 выделена зона слежения в положительную полуволну тока фазы Aisa(t). Чтобы удержать фактический ток фазы А вблизи значений заданного тока isza(t) на протяжении зоны a слежения поступаем следующим образом. На всем протяжении рассматриваемой зоны a включаем катодные тиристоры 28 и 29 фаз В и С, чему соответствуют "нули" сигналов управления Xb и Xc см. фиг. 2 и 3 - каналы управления, соответственно 21 и 23. На фиг. 4 катодные тиристоры 28 и 29 фаз В и С показаны в виде ключей, замкнутых на "минус" источника 2 питания ed. А тиристоры 24 и 27 фазы А переключаем в соответствии со знавком рассогласования ya между заданным и фактическим током в фазе.
Например, в момент 0 фиг. 3 isa(t)<isza(t), или Ea=[iza(t)-isa(t)]>0
Поэтому должна быть подана команда по каналу 18 на открытие анодного тиристора 24 фазы А фиг.3, что соответствует верхнему положению ключа фазы А на фиг. 4. При этом через фазу А двигателя 3 потечет нарастающий ток фиг. 3. В момент 1 фактический ток isa(t) становится больше заданного isza(t), т.е. isa(t)>issa(t) и E=[isza(t)=isa(t)]<0, что приведет к гашению анодного тиристора 24 фазы А и практически одновременному открытию катодного тиристора 27 фазы А по каналу 19. При этом фазы А, В, с двигателя оказывается законченными на "минус" источника притания 2, и тем самым ток в фазе А начнет спадать (фиг. 3) до момента 2, когда Ea опять станет больше нуля Ea>0. Тиристоры 27 и 24 фазы А вновь переключаются и по фазе А до момента 3 будет вновь протекать нарастающий ток. А далее процесс будет повторяться на всей зоне слежения. Ширина зоны нечуствительности d для переключения тиристоров 24 и 27, определяется неидеальностью исполнения конкретных узлов схемы, например, гистерезис, инерционность и запаздывание компараторов.
В момент 4 (фиг. 2 и 3) произойдет смена зон слежения. Зона a слежения переместится в фазу С фиг. 2. Теперь на интервале a слежения постоянно будут включениы: анодный тиристор 24 фазы А и анодный тиристор 25 фазы В. А поддержание тока фазы С на заданном уровне будет осуществляться переключением тиристоров 26 и 29 фазы С по алгоритму, описанному выше для фазы А.
Затем аналогичное слежение за током переходит в фазу В и, таким образом, за период выходной частоты имеют место шесть зон слежения, меняющихся циклически по определенному алгоритму (фиг. 2). Алгоритм управления внутри каждой зоны одинаков, но применяется для соответствующих тиристоров в каждой фазе.
Алгоритм управления вентилями 24 29 в каждой фазе вне зоны слежения идентичен, и его можно проследить по фиг. 2 на интервале полного периода фазы А.
Реализация рассмотренного способа управления вентилями инвертора на 1/6 периода дважды за период позволяет сохранить способность системы к выходу на полное напряжение при 180-градусном управлении, когда напряжение на нагрузке меняется по величине и знаку на каждой 1/6 части периода. И, кроме того, такой способ управления позволяет удерживать ток в нагрузке на заданном уровне при скоростях движения, меньших номинального значения. При этом значительно уменьшаются потери в преобразователе путем снижения частоты переключений, так как модуляция занимает 1/3 периода 1/6 часть периода в положительной и 1/6 часть периода в отрицательной полуволне в каждой фазе. Если принять за 100 модуляцию на всем периоде то в среднем снижение частоты переключений в фазе фостигает 66 Кроме того, при таком способе управления скорость спадания тока по сравнению со скоростью его нарастания в зоне слежения a меньше, что позволяет дополнительно снизить частоту переключений. Исследования показали, что в электроприводах средней и большой мощности частота переключений вентилей по сравнению с двухполярной ШИМ при одинаковой частоте пульсаций тока падает с 1 кГц до 100.150 Гц.
Сужение зоны слежения до 1/6 части периода вне зоны слежения a к некоторому отклонению кривой тока от заданной синусоидальной формы. Однако при этом форма тока вне зоны слежения не отличается от классической формы тока при 180-градусном способе управления, который применяется в тяговых электроприводах средней и большой мощности практически во всех случаях. А при скоростях выше номинального значения электропривод переходит на алгоритм 180-градусного управления с такой же огибающей тока.
Таким образом, предлагаемый способ управления позволяет существенно снизить потери в инверторе при незначительном изменении формы тока вне зоны регулирования и является технически реализуемым в электроприводах средней и большой мощности.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ АСИНХРОННЫМ ТЯГОВЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 1995 |
|
RU2123757C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2008 |
|
RU2361356C1 |
| СПОСОБ УПРАВЛЕНИЯ ЧЕТЫРЕХКВАДРАНТНЫМ ПРЕОБРАЗОВАТЕЛЕМ С ВЫЧИСЛЕНИЕМ ФАЗ КОММУТАЦИИ И МИКРОПРОЦЕССОРНОЕ УСТРОЙСТВО ЕГО РЕАЛИЗУЮЩЕЕ | 2006 |
|
RU2327276C1 |
| Статический возбудитель электрических машин | 1991 |
|
SU1786618A1 |
| ШЕСТИФАЗНЫЙ ВЕНТИЛЬНО-ИНДУКТОРНЫЙ ДВИГАТЕЛЬ С МИНИМАЛЬНЫМИ ШУМАМИ, ВИБРАЦИЯМИ И ПУЛЬСАЦИЯМИ МОМЕНТА, СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ | 2011 |
|
RU2483416C1 |
| МИКРОПРОЦЕССОРНАЯ СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОВОЗОМ | 2010 |
|
RU2454336C1 |
| ТЯГОВЫЙ ЭЛЕКТРОПРИВОД | 2015 |
|
RU2619925C1 |
| Асинхронный частотно-управляемый электропривод | 1981 |
|
SU1020950A1 |
| ВЕНТИЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2002 |
|
RU2227362C2 |
| ЦИФРОВАЯ СИСТЕМА УПРАВЛЕНИЯ ВЕНТИЛЬНЫМ ДВИГАТЕЛЕМ | 1996 |
|
RU2098917C1 |


Использование: изобретение относится к области электротехники. Сущность изобретения: изобретение позволяет снизить потери в преобразователе и снизить влияние ограничения по минимальному реализуемому фазному току, а, следовательно, и по минимальному моменту путем снижения частоты переключения вентилей. Это достигается тем, что на входы 30 и 31 контроллера 8 скорости подаются сигналы, пропорциональные соответственно заданному моменту на валу асинхронного двигателя 3 и скорости вращения его ротора. На выходах 32 и 33 контроллера 8 формируются синусоидальные последовательности, пропорциональные заданным значениям фазных токов двигателя 3, а на выходах 46, 47 и 48 контроллера 8 с той же частотой формируются импульсные фазные сигналы а, b, c. В усилителях 9, 10 и 11 рассогласования происходит сравнение заданных и фактических значений фазных токов двигателя 3, а в компараторах 12, 13 и 14 определяется знак разности между заданным и фактическим значениям токов. В постоянном запоминающем устройстве 45 по заданному алгоритму из комбинации сигналов a, b, c и сигналов ya, yb, yc, определяющих знак разности заданных и фактических токов, формируются сигналы Xa, Xb, Xc управления тиристорами 24 - 29 инвертора 1. Это позволяет осуществлять слежение за формой тока в каждой фазе двигателя на 1/6 части периода дважды за период и тем самым улучшить КПД инвертора. 2 с.п. ф-лы, 5 ил.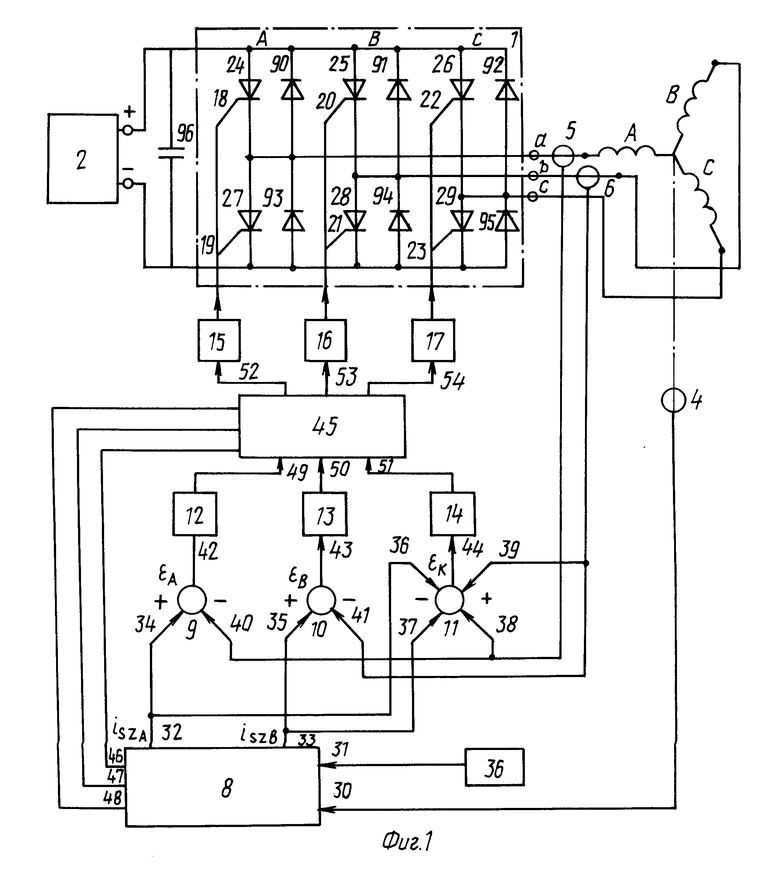
| Патент США N 4629959, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
