сл С
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЕРВОКЛАПАН | 1992 |
|
RU2030658C1 |
| ДВУХКАСКАДНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ | 2000 |
|
RU2183293C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ МОЩНОСТИ СО СТРУЙНЫМ УСИЛИТЕЛЕМ В ПЕРВОМ КАСКАДЕ | 2015 |
|
RU2594094C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД С ТРЕХКАСКАДНЫМ ЭЛЕКТРОГИДРОУСИЛИТЕЛЕМ | 2012 |
|
RU2505715C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2001 |
|
RU2220431C2 |
| Электрогидравлический усилитель | 1978 |
|
SU832139A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ МОЩНОСТИ С МЕХАНИЧЕСКОЙ ОБРАТНОЙ СВЯЗЬЮ ПО ПОЛОЖЕНИЮ ЗОЛОТНИКА | 2008 |
|
RU2389911C1 |
| Электрогидравлический привод с обратной связью по скорости | 1980 |
|
SU903585A1 |
| Электрогидравлический усилитель | 1988 |
|
SU1624210A1 |
| Гидроусилитель | 1988 |
|
SU1571315A1 |
Изобретение относится к гидроавтоматике и может быть использовано при производстве электрогидравлических систем управления. Целью изобретения является повышение точности регулировки, Вначале производится операция намагничивания магнитов электромеханического преобразователя 4, последний устанавливается на гидроусилитель сопло-заслонка, и к соплам 7 и 8 по гидролиниям 5, 6 через дроссели 9 и 10 подводят рабочую жидкость. Затем маг- нитопровод 15 шунтируют шунтами 20 и перемещением сопел 7, 8 по показаниям манометров 11, 12 устанавливают одинаковое давление перед соплами 7,8. После этого шунты 20, 21 снимаются, и магнитный поток замыкается через якорь 13 и полюса 16-19 и якорь 13 с заслонкой 14 смещается из нейтрального положения. Доработка торцов полюсов 16-19 магнитов производится после снятия шунтирования до достижения равенства давлений перед соплами 7, 8. 3 ил.
Изобретение относится к гидроавтоматике и может быть использовано при производстве электрогидравлических систем управления.
Целью изобретения является повышение точности.
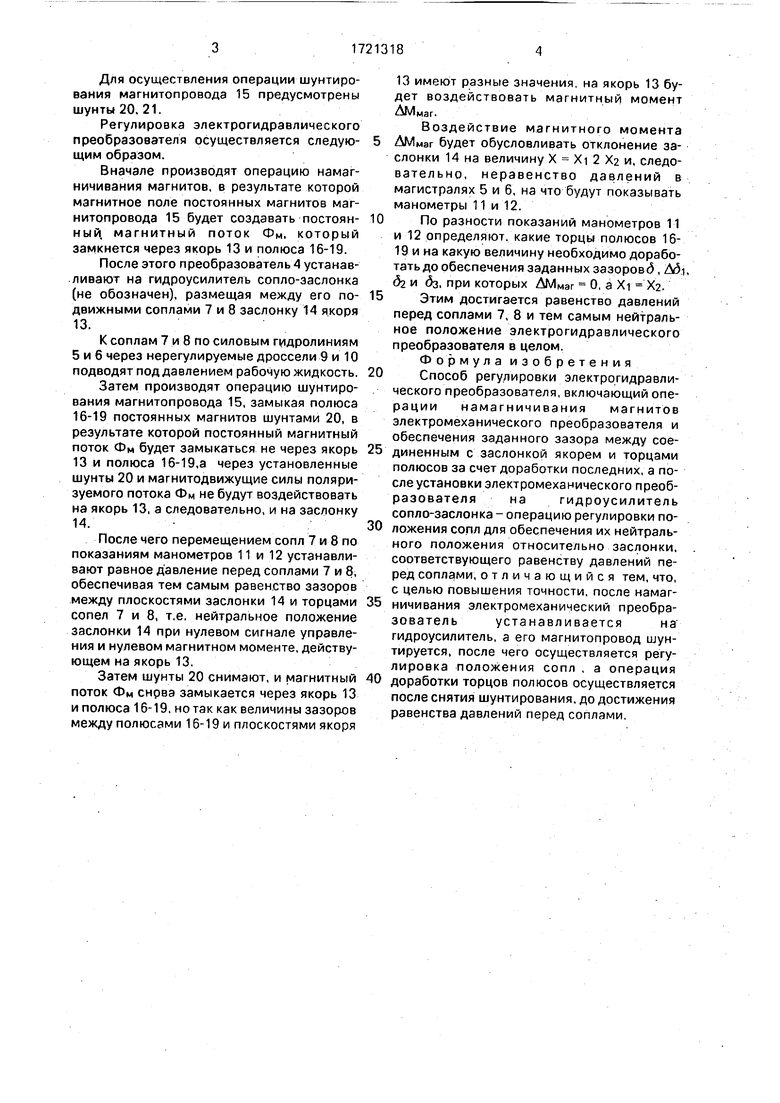
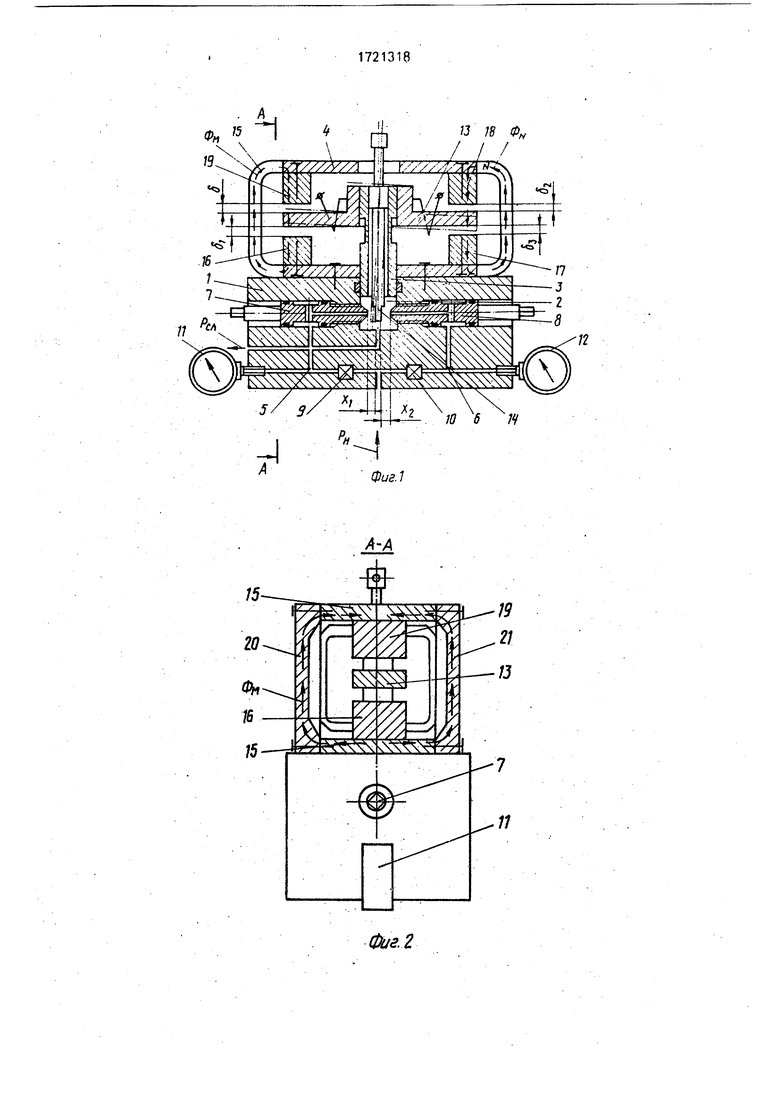
На фиг. 1 изображена принципиальная схема электрогидравлического преобразователя и устройства для реализации способа регулировки; на фиг. 2 - разрез А-А на фиг. 1 в момент установки шунта; на фиг. 3 - график зависимости магнитного и механического моментов от перемещений заслонки.
Устройство для реализации способа регулировки состоит из корпуса 1, на верхней плоскости которого выполнена цилиндрическая полость 2 диаметром, равным диаметру механической пружины 3 электромеханического преобразователя 4.
В корпусе 1 перпендикулярно оси цилиндрической полости 2 выполнены силовые гидролинии 5 и 6 с размещенными в. них подвижными соплами 7 и 8 и нерегулируемыми дросселями 9 и 10, образующими гидравлический мост.
На корпусе 1 установлены манометры 11 и 12 с возможностью замера давления в силовых гидролиниях 5 и 6.
С механической пружиной 3 преобразователя 4 жесткосвязан якорь 13 с заслонкой 14.
Кроме того, в состав электромеханического преобразователя 4 входит магнито- провод 15 с полюсами 16-19 магнитов (не обозначены).
Х|
ГО
л
ы
00
деД
Для осуществления операции шунтирования магнитопровода 15 предусмотрены шунты 20. 21.
Регулировка электрогидравлического преобразователя осуществляется следующим образом.
Вначале производят операцию намагничивания магнитов, в результате которой магнитное поле постоянных магнитов магнитопровода 15 будет создавать постоянный магнитный поток Фм, который замкнется через якорь 13 и полюса 16-19.
После этого преобразователь 4 устанавливают на гидроусилитель сопло-заслонка (не обозначен), размещая между его подвижными соплами 7 и 8 заслонку 14 якоря 13.
К соплам 7 и 8 по силовым гидролиниям 5 и 6 через нерегулируемые дроссели 9 и 10 подводят под давлением рабочую жидкость.
Затем производят операцию шунтирования магнитопровода 15, замыкая полюса 16-19 постоянных магнитов шунтами 20, в результате которой постоянный магнитный поток Фм будет замыкаться не через якорь 13 и полюса 16-19,а через установленные шунты 20 и магнитодвижущие силы поляризуемого потока Фм не будут воздействовать на якорь 13, а следовательно, и на заслонку 14.
После чего перемещением сопл 7 и 8 по показаниям манометров 11 и 12 устанавливают равное давление перед соплами 7 и 8, обеспечивая тем самым равенство зазоров между плоскостями заслонки 14 и торцами сопел 7 и 8, т.е. нейтральное положение заслонки 14 при нулевом сигнале управления и нулевом магнитном моменте, действующем на якорь 13.
Затем шунты 20 снимают, и магнитный поток Фм снрвэ замыкается через якорь 13 и полюса 16-19, но так как величины зазоров между полюсами 16-19 и плоскостями якоря
13 имеют разные значения, на якорь 13 будет воздействовать магнитный момент
ДМмаг.
Воздействие магнитного момента
ДМмаг будет обусловливать отклонение заслонки 14 на величину X Xi 2 Хг и, следовательно, неравенство давлений в магистралях 5 и б, на что будут показывать манометры 11 и 12.
По разности показаний манометров 11 и 12 определяют, какие торцы полюсов 16- 19 и на какую величину необходимо доработать до обеспечения заданных зазоров, A3.i, дг и дз. при которых АММЭг 0, а Хг Х2.
Этим достигается равенство давлений перед соплами 7, 8 и тем самым нейтральное положение электрогидравлического преобразователя в целом.
Фор мула изобретения
Способ регулировки электрогидравли- ческого преобразователя, включающий операции намагничивания магнитов электромеханического преобразователя и обеспечения заданного зазора между соединенным с заслонкой якорем и торцами полюсов за счет доработки последних, а после установки электромеханического преобразователя на гидроусилитель сопло-заслонка - операцию регулировки положения сопл для обеспечения их нейтрального положения относительно заслонки, соответствующего равенству давлений перед соплами, отличающийся тем, что, с целью повышения точности, после намагничивания электромеханический преобразователь устанавливаетсяна гидроусилитель, а его магнитопровод шунтируется, после чего осуществляется регулировка положения сопл , а операция
доработки торцов полюсов осуществляется после снятия шунтирования, до достижения равенства давлений перед соплами.
и
la 1
i L///y i/ -- vt
Лт /г-Л- / / Гs
k
/ I /
Я/ П
N/,
/жт/тт
V
ZZL
///////J&.
й
мНаг M/iex.
м
flex.
ФигЗ
| Бекиров Я.А | |||
| Технология производства Следящего привода | |||
| - М.: Машиностроение, 1977, с | |||
| Способ очистки нефти и нефтяных продуктов и уничтожения их флюоресценции | 1921 |
|
SU31A1 |
| Способ использования делительного аппарата ровничных (чесальных) машин, предназначенных для мериносовой шерсти, с целью переработки на них грубых шерстей | 1921 |
|
SU18A1 |
