Изобретение относится к электротехнике и может быть использовано в исполнительных механизмах различного назначения с цифровым управлением.
Целью изобретения является упрощение электропривода, повышение КПД и равномерности вращения путем увеличения среднего значения вращающего момента и уменьшений его пульсаций.
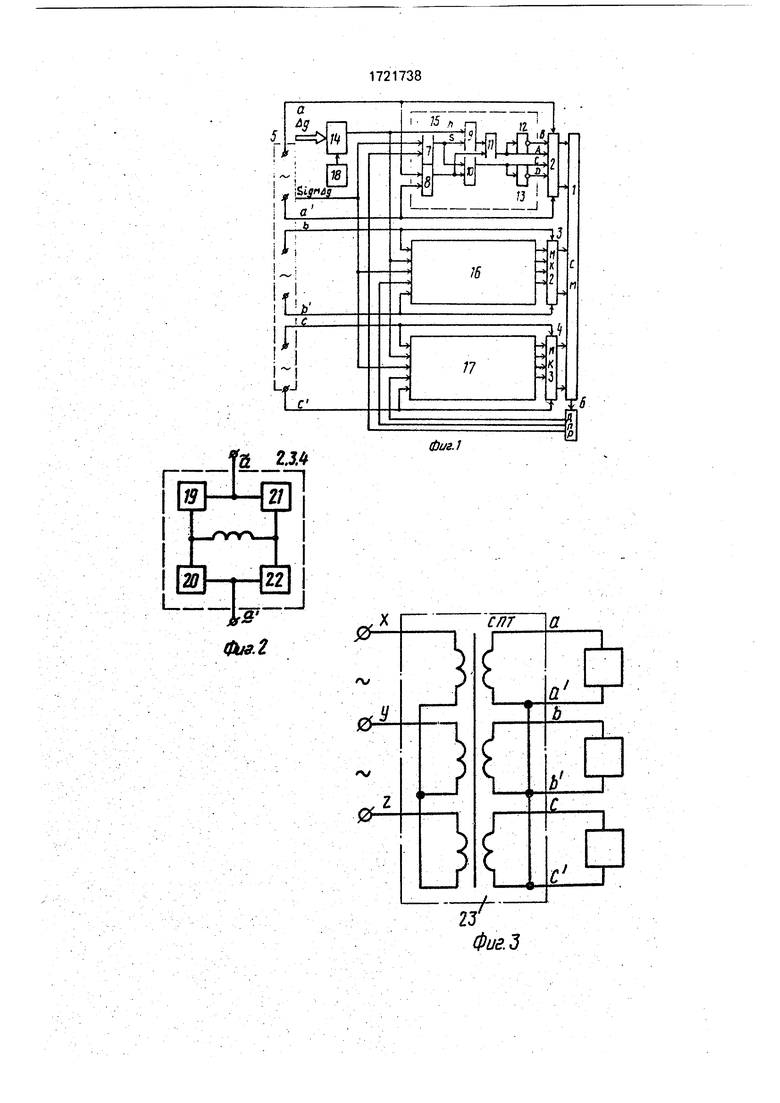
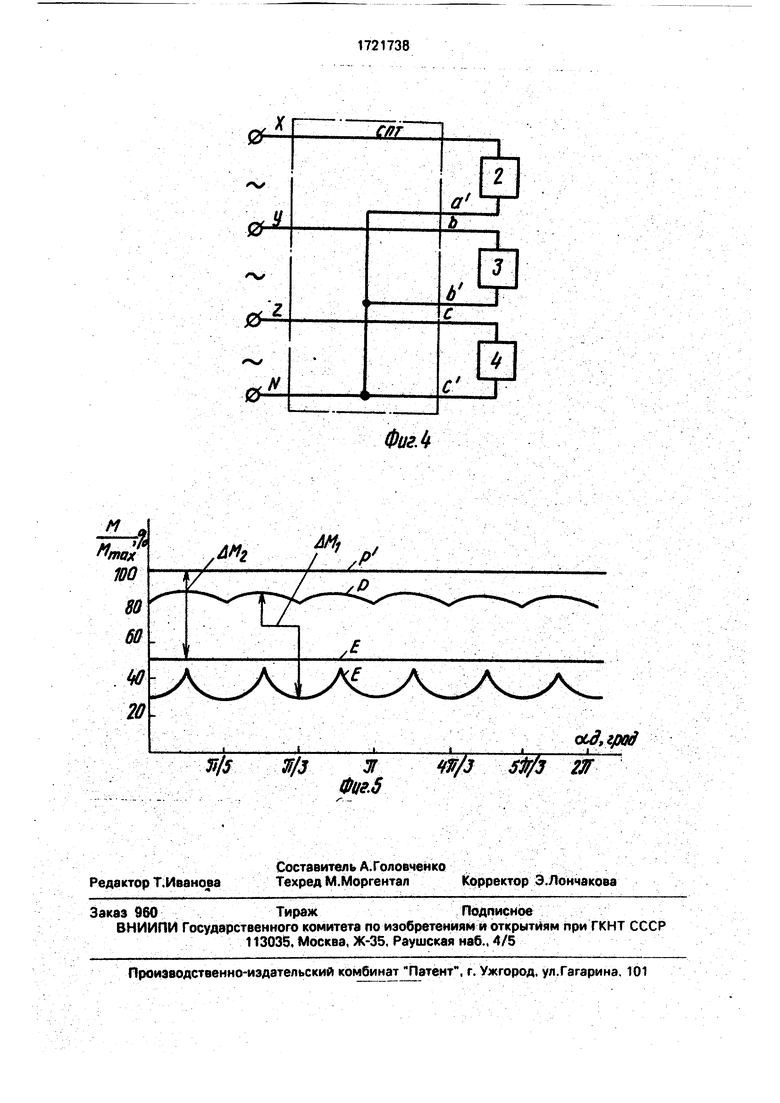
На фиг. 1 представлена функциональная электрическая схема вентильного электропривода с непосредственным питанием от сети переменного тока; на фиг. 2 - функциональная схема мостового коммутатора для одной фазы синхронной машины; на фиг. 3 - вариант подключения мостовых коммутаторов к сети переменного тока с гальванической развязкой от первичной сети; на фиг. 4 - подключение мостовых коммутаторов без согласующего трансформатора; на фиг. 5 - графики зависимости относительного вращающего момента синхронной машины от угла поворота вала во всем диапазоне изменения фазы сети.
Вентильный электропривод содержит синхронную машину 1 с трехфазной
VI
СА) 00
якорной обмоткой, гальванически развязанные фазы которой подключены соответственно выходам мостовых коммутаторов 2-4, силовые входы каждого из которых снабжены зажимами для подключения к одной из фаз a, a1; b,bi; с, с сети 5 переменного тока. На валу синхронной машины 1 установлен датчик 6 положения ротора, выполненный с тремя выходами для осуществления пози- ционно-зависимой коммутации.
Вентильный электропривод содержит также блок реверса с четырьмя входами и тремя выходами и логический блок управления.
Блок реверса составлен из трех-двух входовых логических элементов ИСКЛЮЧАЮЩЕЕ ИЛИ 7, объединенные первые входы которых образуют первый вход блока реверса, предназначенный для подключения к шине знака slgnAg управляющего воздей- ствия. Вторые входы логических элементов 7 образуют соответственно второй, третий и четвертый входы блока реверса, соединенные соответственно с выходами датчика б положения ротора. Выходы логических элементов 7 образуют соответствующие выходы блока реверса.
Логический блок управления выполнен трехканальным, каждый канал которого составлен из компаратора 8, трех логических элементов ИСКЛЮЧАЮЩЕЕ ИЛИ 9-11 и двух инверторов 12 и 13. Объединенные первые входы первого 9 и второго 10 управляющих логических элементоов образуют первый вход канала логического блока уп- равления, подключенный к одному из выходов блока реверса. Второй вход логического элемента 9 образует второй вход упомянутого канала, подключенный к выходу широт- но-импульсного модулятора (ШИМ) 14. Вторые входы второго 10 и третьего 11 логических элементов. ИСКЛЮЧАЮЩЕЕ ИЛИ подключены к выходу компаратора 8, а их выходы - к входам инверторов 12 и 13. Компаратор 8 выполнен двухвходовым, образу- ющим соответственно третий и четвертый входы данного канала, соединенные с силовыми входами одного из мостовых коммутаторов 2-4. Первый вход логического элемента 11 соединен с выходом логическо- го элемента 9. Выходы логических элементов 10, 11 и инверторов 12, 13 образуют выходы данного канала блока управления, подключенные соответственно к управляющим входам одного из мостовых коммутато- ров.
ШИМ 14 выполнен общим для всех каналов 15-17 блока управления. Его кодовый вход служит для подключения к шине Дд
управляющего воздействия, а тактовый вход соединен с выходом генератора 18 импульсов.
Коммутатор для одной фазы обмотки якоря составлен из четырех ключей 19-22 (см. фиг. 2), соединенных по мостовой схеме, выводы а, а переменного тока которой образуют силовые входы коммутатора, а выводы второй ее диагонали - выходы коммутатора.
Каждый мостовой коммутатор 2-4 может быть подключен к сети X, Y, Z посредством согласующего трансформатора 23 (см. фиг. 3)или без него (см. фиг. 4). В последнем Случае сеть имеет нулевой провод N.
Вентильный электропривод работает следующим образом.
В ШИМ 14 с частотой fw записывается с шины код Дд управляющего воздействия.
При этом частота Тш выбирается в соответствии с соотношением
)
где fr - частота генератора.
Длительность т импульса управления для конкретного Дд составляет
.,-.#;
Таким образом, коэффициент заполнениях импульсов ШИМ всех фаз синхронной машины 1 равен т Дд
у .. а . I ш 9 -ч
(3)
2п-1 где Тш - период импульсов ШИМ.
Блок управления i-й фазы на основе сигналов е, h, s осуществляет формирование сигналов А, В, С, D управления ключами 19-22 мостового коммутатора в соответствии с таблицей
Логические переменные (сигналы е. h. s) определяются следующим образом. Выходной сигнал е компаратора главного канала блока управления равен логическому нулю при отрицательной полярности сетевого напряжения относительно нейтрали сети 5 переменного тока и логической единице в противном, случае. Значение выходного сигнала ШИМ h 1 определяет подключение i-й фазы якорной обмотки к фазе сети, h 0 соответствует динамическому торможению синхронной машины 1 путем короткого замыкания 1-й фазы. Значение s 1 определяет направление протекания тока в 1-й фазе от начала к концу и наоборот и может быть найдено как
rt
s sign Ag + sign sin (Од-ь |л1), i 0, 2
где Од - угол поворота ротора синхронной машины,
что задает реверс вентильного электропри- вода при изменении значения sign Ag путем одновременного инвертирования сигналов s всех фаз, что приводит к перемене направления тока во всех фазах и смене знака вращающего момента. Сигна-
2
лы sign sin ( Gg + i) снимаются с выходов датчика 6 положения ротора, что с учетом полярности сетевого напряжения обусловливает независимость направления тока фаз якорной обмотки от текущей фазы сети.
Минимизированные логические уравнения, полученные из таблицы .имеют вид
A e®(s©h);
C e©s;
D С.
Единичные значения сигналов управления ключами 19-22 определяют их замкнутое состояние и наоборот.
Подключение фаз якорной обмотки синхронной машины к питающему напряжению осуществляется следующим образом. Пусть в начальный момент значения сигналов h. s, е таковы: h 0, s 0. е 0. На выходах логических элементов 9-11 имеют логические нули, на выходах инверторов 12, 13 - логические единицы. При этом ключи 19 и 21 разомкнуты, а ключи 20 и 22 замкнуты, что соответствует режиму динамического торможения. При смене значения h (h 1) на выходах логических элементов 9 и 11 - сигналы логических единиц, что соответствует замыканию ключей 19 и 22 и размыканию .ключей 20 и 21 и протеканию тока в обмотке от конца к началу. При смене знака е питающего напряжения (е 1) на выходе логического элемента 10 появляется сигнал логической единицы, а на выходе логического элемента 11 - логического нуля, ключи 20 и 21 замыкаются, ключи 19 и 22 размыкаются, и направление тока в фазе остается неизменным. Изменение направления тока в фазе происходит лишь при изменении сигнала s. При переходе сигнала s в логическую единицу (для значений h 1, е 1) на выходах логических элементов 9, 10 появляется логический нуль, логического элемента 11 - логическая единица и происходит размыкание ключей 20 и 21 и замыкание ключей
19 и 22, что соответствует протеканию тока в.обмотке от начала к концу. Мостовые коммутаторы 2-4 должны быть реализованы на ключах с двусторонней проводимостью (симмисторы, полевые транзисторы, пары биполярных транзисторов).
Положительный эффект изобретения достигается за счет отказа от модуляции фазных напряжений синхронной машины 1 в функции угла Од поворота вала по гармоническим законам
sln( Og+ |л:|), 1 (Г2 .
Это позволяет значительно упростить вентильный электропривод, исключить управляемый делитель частоты, два ШИМ, постоянное запоминающее устройство. Анализ полярности сетевого напряжения либо относительно нейтрали трехфазной сети (см. фиг. 4), либо относительно других выводов вторичных обмоток согласующего трехфазного трансформатора (см. фиг. 3, когда выводы a b , с не связаны) позволяет отказаться от использования трехфазного трансформатора с выводом средних точек вторичных обмоток, а для высоковольтных синхронных машин - и от использования согласующего трехфазного трансформатора (см. фиг, 4), тем самым значительно улучшая массогабаритные показатели привода и увеличения его КПД. Кроме того, использование вместо дорогого цифрового датчика угла простого и надежного датчика для позиционной зависимости коммутации позволяет существенно снизить стоимость привода и повышает его надежность. Это позволяет поднять средний вращающий момент и уменьшить его пульсации.
Действительно, если рассматривать пусковые режимы работы привода для всех возможных угловых положений Од ротора синхронной машины Од - 0 - 2л:, изменяя для каждого конкретного Од фазу сети от О до 2л:, то получится зона значений вращающего момента для произвольных Од и моментов времени. Анализ показывает, что в известном устройстве (см. фиг. 5) эта зона ограничена кривыми Е - F, а в предлагаемом устройстве - кривыми ЕУ- F , т.е. при фиксированном Од момент М пульсирует с частотой сети от значения MI до MI , i 1, 2. Вычисление пульсации ДМ| по формуле
АМг
М|Макс М
1МИН
100%
дает для первого устройства AM-i 66%, для предлагаемого устройства ДМ2 50%, что свидетельствует о снижении пульсаций вращающего момента на. 16%. Кроме того, из
графика (см. фиг. 5) видно, что в предлагаемом электроприводе вращающий момент достигает предельно возможного значения Мамам при данном напряжении питания (100% от Ммакс граница F ), a M2cpfi75% от Ммакс, тогда как в первом устройстве MI максе &Q% от Ммакс (кривая F), при этом от Ммакс и, следовательно, увеличение среднего момента составляет 15% без увеличения напряжения питания.
Следует подчеркнуть, что в динамическом режиме пульсации напряжений якорных обмоток сглаживаются электромагнитной инерцией фаз, а электромеханическая инерция двигателя сглаживает пульсации его вращающего момента.
Таким образом, за счет исключения из схемы некоторого количества логических и силовых элементов и использования более простого датчика положения ротора удалось значительно уменьшить пульсации вращающего момента электропривода и поднять его среднее значение, что играет решающую роль для целого ряда применений описанного электропривода (робототехника, станки с ЧПУ и т.д.)..
Формула изобретения
Вентильный электропривод с непосредственным питанием от сети переменного тока, содержащий синхронную машину с трехфазной якорной обмоткой, гальванически развязанные фазы которой подключены соответственно к выходам трех мостовых коммутаторов, силовой вывод каждого из которых снабжен зажимами для подключения к одной из фаз сети переменного тока, датчик положения ротора, установленный на валу синхронной машины, блок реверса с четырьмя входами и тремя выходами, первый вход которого служит для подключения к шине знака управляющего воздействия, трехканальный логический блок управления, каждый трехвходовый канал которого составлен из соединенных между собой
компаратора, трех логических элементов ИСКЛЮЧАЮЩЕЕ ИЛИ и двух инверторов, выходы которых и выходы второго и третьего логических элементов, подключенных к
входам инверторов, образуют четыре выхода данного канала, подключенных к управляющим входам соответствующего мостового коммутатора, первый вход каждого канала блока управления, образованный объединенными первыми входами первого и второго логических элементов ИСКЛЮЧАЮЩЕЕ ИЛИ данного канала, подключён к одному из выходов блока реверса, второй вход упомянутого канала, образованный вторым входом его первого логического элемента ИСКЛЮЧАЮЩЕЕ ИЛИ, соединен с выходом широтно-импуль- сного модулятора, а третий вход каждого канала блока управления, образованный
входом его компаратора, соединен с одним из силовых входов соответствующего мостового коммутатора, генератор импульсов, отличающийся тем, что, с целью упрощения, повышения КПД и равномерности вращения путем увеличения среднего значения вращающего момента и уменьшения его пульсаций, датчик положения ротора снабжен двумя дополнительными выходами для осуществления позиционнозависимой коммутации, выходы датчика подключены соответственно к второму, третьему и четвертому входам блока реверса, широтно-импульсный модулятор выполнен общим для всех трех каналов блока
управления, кодовый вход широтно-импуль- сного модулятора служит для подключения к шине управляющего воздействия, а тактовый вход соединен с выходом генератора импульсов, компаратор каждого канала блока управления снабжен вторым входом, образующим четвертый вход данного канала, подключенный к другому силовому входу соответствующего мостового коммутатора.
Гг
fa Z.JA
Фиг.1
| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электропривод с непосредственным питанием от сети переменного тока | 1985 |
|
SU1585880A1 |
| Вентильный электропривод | 1986 |
|
SU1670752A2 |
| Управляемый вентильный электродвигатель | 1985 |
|
SU1259463A1 |
| Вентильный электродвигатель | 1986 |
|
SU1818664A1 |
| РЕВЕРСИВНЫЙ ВЕНТИЛЬНЫЙ ЭЛЕКТРОПРИВОД (ВАРИАНТЫ) | 1999 |
|
RU2142193C1 |
| Управляемый вентильный электродвигатель | 1986 |
|
SU1410212A2 |
| Вентильный электропривод | 1989 |
|
SU1758822A1 |
| Управляемый вентильный электродвигатель | 1976 |
|
SU741383A1 |
| Вентильный электродвигатель | 1989 |
|
SU1654915A1 |
| Вентильный двигатель | 1983 |
|
SU1081753A1 |
Изобретение относится к электротехнике и может быть использовано в исполнительных механизмах различного назначения с цифровым управлением, Целью изобретения является упрощение, повышение КПД путем увеличения среднего значения вращающего момента и уменьшения его пульсаций. С этой целью в вентильном электроприводе с непосредственным питанием от сети переменного тока датчик 6 положения ротора выполнен с тремя выходами для осуществления позиционно-зависимой коммутации, широтно-импульсный модулятор - общим для всех каналов 15-17 блока управления с подключением его кодового входа к шине управляющего воздействия и выходу генератора 18 импульсов. Выходы датчика 6 подключены соответственно к трем входам блока реверса, выполненного на элементе ИСКЛЮЧАЮЩЕЕ ИЛИ 7. Первый вход блока реверса соединен с шиной знака управляющего воздействия, а третий и четвертый входы каждого канала блока управления - с силовыми входами одного из мостовых коммутаторов 2-4. Исключение ряда узлов из схемы электропривода .позволило отказаться от модуляций фазных напряжений синхронной машины 1 в функции угла поворота ее ротора. 5 ил., 1 табл. W Ј
I-Г-&
Ф
№
Физ.г
ФиаЗ
Фцг.5
ФигЛ
ЩЗ Sffi 2Я
| Вентильный электропривод с цифровым управлением | 1988 |
|
SU1582291A1 |
| кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Вентильный электропривод с непосредственным питанием от сети переменного тока | 1985 |
|
SU1585880A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
