ния. Изменение режимов работы электропривода осуществляется программно. Введение блока 14 преобразования фач- ных напряжений и узла 13 преобразования дрейфа напряжения источника питания позволяет улучшить кассогабаритные и регулировочные характеристики за
счет выполнения преооразователя частот в виде трехфазного мостового инвертора при сохранении синусоидальности выходного напряжения и исключении влияния дрейфа напряжения источника питания на регулировочные характеристики электропривода. 4 ил.,2 табл.


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения электрической энергии | 1989 |
|
SU1758573A1 |
| Цифровой измеритель электрической энергии многофазной сети | 1988 |
|
SU1647443A1 |
| Многокамерное хранилище сельскохозяйственной продукции с регулируемой газовой средой | 1983 |
|
SU1399921A1 |
| Вентильный электродвигатель | 1986 |
|
SU1818664A1 |
| Устройство для управления преобразователем постоянного напряжения в квазисинусоидальное с ШИМ | 1983 |
|
SU1358055A1 |
| Электропривод | 1985 |
|
SU1354380A1 |
| Устройство для управления трехфазным мостовым инвертором | 1980 |
|
SU1166243A1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ОТКАЗОВ В ШАГОВОМ ЭЛЕКТРОПРИВОДЕ | 1992 |
|
RU2037264C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2020724C1 |
| Преобразователь постоянного напряжения в трехфазное переменное напряжние | 1988 |
|
SU1658346A1 |
Изобретение относится к электротехнике, в частности к вентильным электроприводам и может быть использовано в сервомеханизмах с цифровым управлением. Целью изобретения является улучшение масс-габаритных и регулировочных характеристик. Вентильный электропривод с цифровым управлением содержит синхронный электродвигатель 1, трехфазный мостовой инвертор 2, цифровой датчик 3 углового положения ротора, программируемый блок управления 6, широтно-импульсные модуляторы 9, 10, блок 14 преобразования фазных напряжений, узел 13 преобразования дрейфа напряжения источника питания. Изменение режимов работы электропривода осуществляется программно. Введение блока 14 преобразования фазных напряжений и узла 13 преобразования дрейфа напряжения источника питания позволяет улучшить массогабаритные и регулировочные характеристики за счет выполнения преобразователя частот в виде трехфазного мостового инвертора при сохранении синусоидальности выходного напряжения и исключении влияния дрейфа напряжения источника питания на регулировочные характеристики электропривода. 4 ил., 2 табл.
Изобретение относится к электро- технике, в частности к вентильным электроприводам, и может быть использовано в сервомеханизмах с цифровым управлением.
Цель изобретения - улучшение мас- согабаритных и регулировочных характеристик.
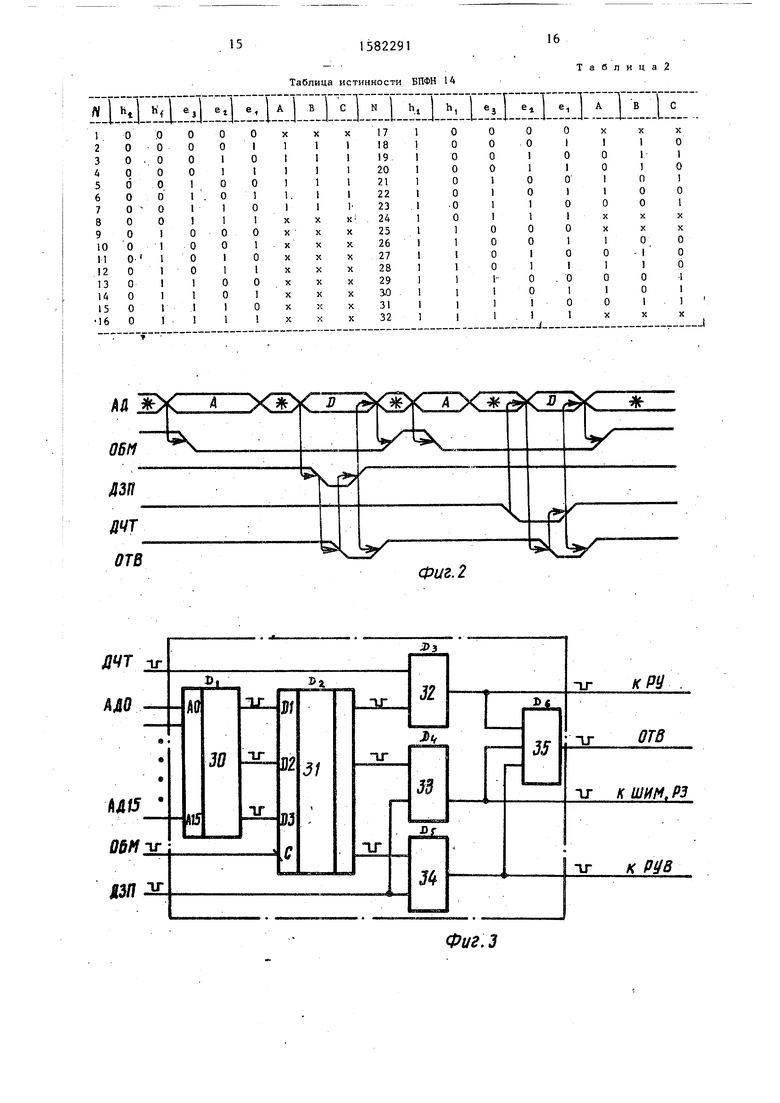
На фиг.1 представлена функциональная схема вентильного электропривода с цифровым управлением; на фиг. 2 - диаграммы протоколов обмена по магистрали; на фиг. 3 - пример выполнения интерфейсного блока; на фиг. 4 - временные диаграммы, поясняющие работу устройства.
Вентильный электропривод с цифровым управлением (фиг.1) содержит синхронный электродвигатель 1, якорная обмотка которого подключена к выходам преобразователя 2 частоты (ПЧ), а вал механически связан с цифровым датчиком 3 положения ротора (ЦДУ), выходы которого через резистор 4 угла (РУ) с управляющим входом подключены к магистрали 5, подключенной к выходу программируемого блока 6 управления, интерфейсный блок 7 сопряжения (ИФ) с тремя выходами, входы которого подключены к магистрали 5, к первому выходу подключен управляющий вход регистра 4 угла, к второму - соответственно входы записи регистра 8 знака (РЗ) с тремя выходами, первого 9 и второго 10 широтно-импульсных модуляторов (ШИМ), кодовые входы которых подключены к магистрали 5, а тактовые входы - к выходу управляемого делителя 11 частоты (УДЧ) с частотным входом, кодовые входы которого подключены к магистрали 5 через регистр 12 управляющих воздействий (РУВ), вход записи которого подключен к третьему выходу интерфейсного , блока 7, узел 13 преобразования дрейфа напряжения источника 14 питания в частоту (ПН), подключенный к час0
5
0
тотному входу управляемого делителя 11 частоты. Блок 14 преобразова5 ния фазных напряжений (БПФН) выполнен в виде четырех логических инверторов 15-18, трех логических элементов 2И-ИЛИ-НЕ 19-21 и трех логических элементов 2И 22-24, при этом выходы логических элементов 2И 22-24 образуют три выхода блока 14 преобразования фазных напряжений (БПФН,) и подключены к входам управления преобразователя 2 частоты, выполненного в виде трехфазного мостового инвертора.
Первый вход блока 14 преобразования фазных напряжений, подключенный к выходу второго широтно-импульсного модулятора 10, образован объединенными первыми входами логических элементов 2И 22-24.
Второй Bxo блока 14 преобразования фазных напряжений, подключенный к
5 вькоду первого широтно-импульсного модулятора 9, образован объединенными соответственно четвертым входом первого 19, третьим входом второго 20, третьим входом третьего 21 элементов 2И-2ИЛИ-НЕ и входом второго логического инвертора 16.
I Третий вход блока 14 преобразования фазных напряжений, подключенный к третьему выходу регистра 8 знака, образован объединенными третьим входом первого логического элемента 2И- 2ИЛИ-НЕ 19 и входом четвертого логического инвертора 18.
Четвертый вход блока 14 преобразования фазных напряжений, подключенный к второму выходу регистра 8 знака, образован объединенными соответственно входом первого логического инвертора 15 и четвертым входом второго логического элемента 2И-2ИЛИ- НЕ 20.
Пятый вход блока 14 преобразования фазных напряжений, подключенный к первому выходу регистра 8 знака, об0
5
0
5
разован объединенными соответственно входом третьего логического инвертора 1 7 и четвертым входом третьего дорического элемента 2И-2ИЛИ-НЕ 21.
Первый вход первого логического элемента 2И-2ИЛИ-НЕ I9 подключен к (выходу первого логического инвертора 15, к выходу второго логического инвертора 16 подключены объединенные соответственно второй вход первого 19, первый вход второго 20 и первый вход третьего 21 логических элементов 2И- 2ИЛИ-НЕ, к выходам третьего и четвертого логических инверторов 17 и 18 подключены соответственно вторые входы третьего и четвертого логических элементов 2И-2ИЛИ-НЕ 20 и 21, к выходам трех логических элементов 2И- 2ИЛИ-НЕ подключены соответственно вторые входы трех логических элементов 2И.
Программируемый блок 6 управления содержит микропроцессор (МП) 25. оперативное запоминающее устройство (ОЗУ) 26, постоянное запоминающее устройство (ПЗУ) 27, задающий генератор (ЗГ) 28 и программируемый таймер (ПТ) 29.
Интерфейсный блок 7 сопряжения содержит (фиг.З) дешифратор 30, регистр 31, три логических элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 32-34 и логически элемент ЗИ 35.
Вентильный электропривод с цифровым управлением работает следуюим образом.
Протоколы обмена на магистрали зависят от типа применяемого управляющей микроЭВМ. Так, при использоании в качестве программируемого лока управления электроприводом мик- оЭВМ Электроника-60 с совмещенной иной адреса и данных (АД) типа -BUS процедура обмена выполняется следующим образом (фиг.2):
а)микропроцессор (МП) 25 выставляет на шину (АД) адрес, сопровождая его срезом сигнала Обмен (ОБМ);
б)интерфейсный блок 7 (ИФБС) распознает адрес внешнего устройства
(РУ ЧРУВ 12, ШИМ 9 и 10, РЗ 8;, запоминает его;
в)при чтении данных из РУ 4 МП 25 выставляет сигнал Чтение данных (ДЧТ), интерфейсный блок 7 сопряжеия (ИФБС 7) выдает сигнал низкого ровня на РУ 4 и выставляет сигнал Ответ (ОТВ) РУ 4 выставляет на
магистраль данные №1 25, считывает код и снимает сигнал ДЧТ, после чего ИФБС 7 снимает сигнал ОТВ, а МП 25 - , сигнал ОБМ,
При записи данных в РУВ 12, ШИМ 9 и 10, РЗ 8 МП 25 выставляет сигнал Запись данных (ДЗП), ИФБС 7 выдает сигнал низкого уровня на внешнее
o устройство (РУВ 12 либо ШИМ 9 и 10 и РЗ 8), адрес которого ранее был выставлен на магистрали, внешнее устройство записывает данные, ИФБС 7 выставляет сигнал ОТВ, МП 25 снимает
5 сигнал ДЗП и убирает данные с магистрали, ИФБС 7 снимает сигнал ОТВ, МП 25 убирает сигнал ОБМ.
Изменение режимов работы привода осуществляется программно с помощью
0 программы REGL. Реверс привода осуществляется программой SERVO. Изменение частоты вращения происходит под управлением программы REGL при изменении задания Q(n) по углу, фор5 мируемого некоторым внешним управляющим устройством. Останов привода происходит при совпадении текущего F(n) и заданного Q(n) положений вала сер- водина путем установки программой
0 REGL кода Q(n) управляющего воздействия уравновешивающего момента нагрузки.
На входы D1-D3 РЗ 8 поступают коды е, знака фазных напряжений при обращении МП 25 по адресу РЗ 8. Запись указанных кодов в РЗ 8 производится по сигналу, формируемому ИФБС 7. На цифровые D-входы ШИМ 9 и 10 поступают коды V(,V , определяющие длительность пребывания вектора магнитного поля статора в соседних ори- ентациях. Данные коды зависят от угла ef поворота ротора серводина и являются различными.
Коэффициент заполнения С/Е импульсов ШИМ 9 и 10 связан с записанным в ШИМ по D-входу с помощью МП 25 кодом V и частотой импульсов f на С-входе соотношением
, V с f Т (2-5-0 где S т разрядность модуляторов 9
и Ю; Т - период сигнала на L-входе
ШИМ.
МП 25 вводит значение Q(n) задающего воздействия по углу (либо скорости), .формируемое некоторым внешним устройством управления (не показано),
5
0
5
0
5
и рассчитывает на основе текущих координат системы (угол, скорость, ускорение) код G управляющего воздействия, модуль fG| которого пересылается затем в регистр 12 управляющих воздействий,после чего указанный процесс повторяется. При расчете G может быть использован, например, известный алгоритм ПИД-регулирования:
G(n)G(nH)(n)-F(n);i--K2W(n)-- -KjW(n)-W(n-l)L
3,
где F(n) - код угла поворота серводина, формируемый ЦДУ 6 в момент времени W(n)F(n)- F(n-i) - код скорости серводина,
рассчитываемый МП,25; Q(n) - текущее задание по углу; коэффициенты регулятора; G(n-l),
W(n-l) - предыдущее значение управляющего воздействия и скорости.
Расчет кода W(n) скорости и управление серводином реализуются с помо- щью программ SERVO обслуживания прерываний программируемого таймера 29. При генерации п-го запроса ПТ 29 на прерывание управления передается i программе SERVO, в соответствии с которой МП 25 с помощью магистрали 5, интерфейсного блока 7 сопряжения и регистра 4 сопряжения угла считывает код F угла поворота ротора синхронного электродвигателя, формируемый цифровым датчиком 3 положения ротора и пересылает его в ОЗУ 26. Далее МП 25 в соответствии с программой SEEV09 размещенной в ПЗУ 27, вычисляет код W скорости серводина
V
E(2S-l)sin( + )приСЈ 0,()/6С;
E|(2S-l)ein(2 -gJrr + )|приСе(2Ь-1)/6, (2Ъ-1)
E|(25-l)sin( )1приСе(2Ь-1)/3, (2Ь-1)/2С;
E|(2S-l)sin( - i )|приCG(2b-l)/2, 2()/3C;
E|(2s-l)sin( - |)|приСе 2(2Ь-1)/3, 5(2Ь-1)/бС5
EK2S-l)sin( - -)|приСе 5(2Ь-1)/6, (2V-1)C.
W(n)F(n)-F(n-l), где F(n),F(n-l) 7 считанные Mil 25 коды F угла соответственно при п-м и (п-1)-м прерываниях МП 25.
Коды F угла и W скорости используются при расчете адреса А таблицы N опережающей поэиционно-зависимой модуляции ОПМ фазных напряжений:
(О A(n).F(n)+2 erct8 |fw(n)g,
(2)
где b - разрядность таблицы N ОПМ.
Далее программа SERVO анализирует знак кода G управляющего воздействия, сформированного регулятором и при производит реверс привода путем сдвига на Т аргумента В ОПМ:
Г А(п) при G}0; В(п).,
А(п)+2 при ,- (3)
Для обеспечения периода изменения 2 JT кода ОПМ программа SERVO приводит значение С(п) адреса таблицы ОПМ в диапазон 0,2°-l3s
С(п)
ГВ(п)
В(п)-2
Ь
при (п).2 -1; при В(п)}2Ь-1 ;
,B(n)+2 D при В(п)0
(4)
Далее МП 25 под управлением программы SERVO извлекает элемент N(C) таблицы ОПМ по адресу С и пересылает его в ШИМ 9 и 10 и РЗ 8:
JS
is
N(C) 2J V.}+2Z S 2
IsO J J
(5)
где V.(,l) и ек(,1,2) - компоненты слова N, определяющие длительность пребывания вектора магнитного статора в соседних ориентациях и полярность напряжений на обмотках 1:
(6)
sin( + Ј )| при Се ог(21-1) sinUfj ry )при СеС(2Ь-О/6, ()
при
С6 (2Ь-1)/3, (2Ь-1)
sin(2 rr--|-)
sin( I)|
sin( i)| при (2ь-1)/3,5(2Ь-1)/бС;
Bin( + )( при (2ь- 1)/6, (2Ь-1).
Се (2Ъ-1)/2, 2(2Ь-1)/ЗС; Ь
e(e-sign( + ),
К-1,2,3,(8)
где Е - оператор выделения целой части;sign - оператор выделения знака:
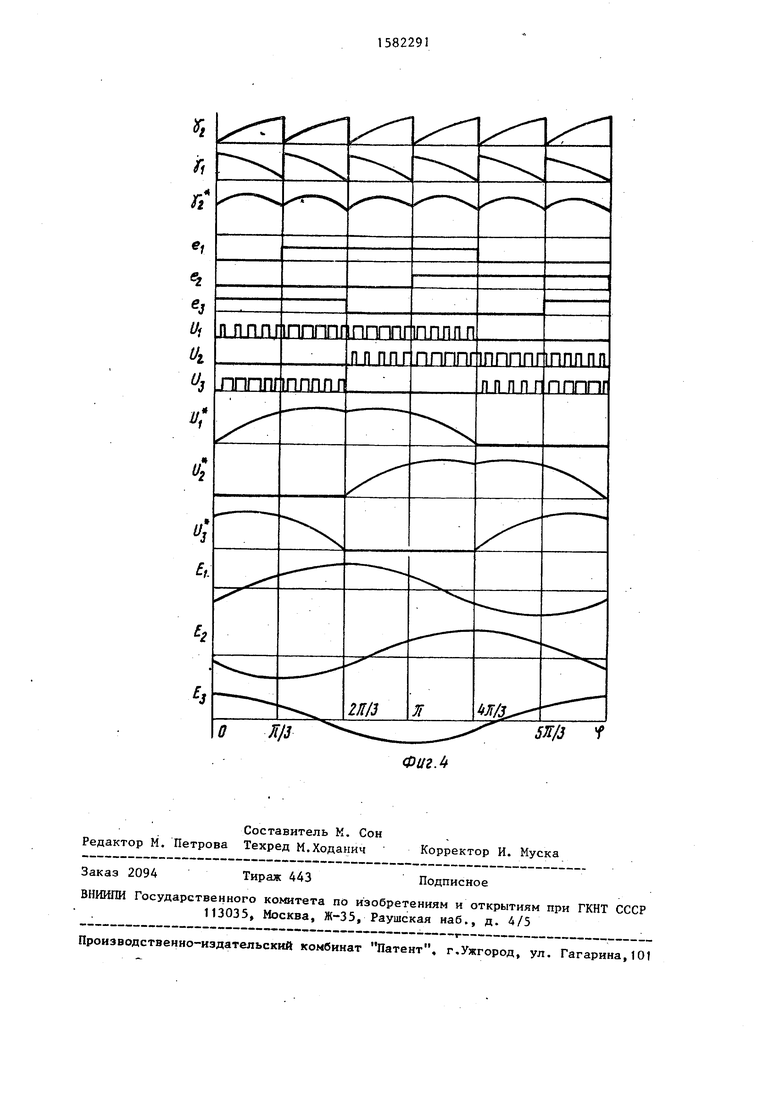
sign , sign , хсО. Рассмотренное выше программное обеспечение (1)-(8) совместно с аппаратными средствами, включающими РЗ, ШИМ 9 и 10, БПФН 14 и ПЧ 2 обеспечивает формирование фазных напряжений U1-Uj GDI, представленных на фиг.4. Анализ фиг.4 показывает, что для любого угла поворота ротора GDI напряжения Uf-U s на выходах ПЧ 2 принимают три возможных комбинации:
Состояние 3 соответствует динамическому торможению путем короткого замыкания якорной обмотки и обеспечивает линейность его регулировочных характеристик. Переход из состояния I в состояние 2 и наоборот сопровождается поворотом вектора Р магнитного поля статора на 60 эл.град. аналогично вентильным электроприводам чс
позиционной коммутацией фазных напряжений, причем ориентация указанных состояний вектора Ф определяется комбинацией сигналов е,-е s знаков фазных напряжений.
Требуемый вектор Ф магнитного поля статора в предлагаемом приводе формируется путем сложения n-й и п-Н-й ориентации $ , ,ФПИ маг нитного поля статора из фиксированного набора шести ориентации fy- ф реализуемых в статике полумостовым
С6 (2Ь-1)/3, (2Ь-1)
(2ь-1)/3,5(2Ь-1)/бС;
Се (2Ъ-1)/2, 2(2Ь-1)/ЗС; Ь
(7)
«W
шеститран знстс.рным коммутатором
(.5). Указанное сложение достигается высокочастотным переключением ориентации Ф Ф п+1 и сглаживанием
индуктивностью сгатор-ных обмоток пульсаций фазного тока (а следовательно, и вариаций результирующего,. поля Ј), причем ориентации ф , ф задаются с помощью кодов 6,-е, РЗ 8
и БПФН 14, а относительное время /« , пребывания МПС в п, п+1 ориента- циях - коэффициентами заполнения импульсов ИИМ 9 и 10.
Для расчета функций у)} ъ потребуем равенства угла ц поворота магнитного поля Р заданному углу ц), а нормированный модуль М8 магнитного поля Ф положим равным М 1/3/2. Приме - няя теорему синусов к секторам Ј п/3, (п+1 )/3|, получим разложение вектора
(р по
7i У
приведенное в табл.1.
Зависимость средних значений выходных напряжений ПЧ 2 и Е.-Е- ,.
фазных напряжений CD1 от угла (поворота ротора, соответствующая приведенному в табл.1 закону сканирования ,(ф), i(V) изображена на фиг. 4. Анализ фиг.4 показывает, что несмотря
на несинусоидальный характер средних выходных напряжений ПЧ, средние фазные напряжения Е,-Е3 GDI являются синусоидальным и функциями угла (f поворота ротора и, следовательно, вращающий момент серводина не зависит от угла ip и не содержит коммутационных пульсаций, как и предполагалось при выводе закона сканирования у(у).
).
БПФН 14 обеспечивает с учетом кодов е,-е3 РЗ 8 подключение n-й ориентации магнитного поля р GDI.при выходных. сигналах ШИМ 9 и 10 п,65, пг к подключение п+1-и ориентации
ср при n,l, . Таким образом, длительность сигнала пг ШИМ 10 задает время существования n-й ориентации ф, а разность длительностей h и ht сигналов ШИМ 9 и 10 - время существования п+1-й ориентации р , смещенной на 60 эл. град. С учетом сказанного входной код V2 ШИМ 10 на б определяется функцией сканирования Тг t + 24 приведенной в табл.1. Выражения для входных кодов V j V2 ШИМ 9 и 10, соответствующие функциям #t f были рассмотрены ранее (см. (6)™(8)). Выходные сигналы А,В,С БПФН 14 в зависимости от сигналов hf,h ШИМ 9 и 10 , РЗ 8 управляют ПЧ, причем при нулевых сигналах А,В,С на его выходах формируется высокий, а при единичных - низкий уровень выходного на- 2Q та обусловленных непостоянством напряжения. В соответствии с приведенным описанием функционирование БПФН 14 показано в следующей табл.2 истинно сти.
пряжения питания.
Таким образом, введение блока 14 преобразования фазных напряжений и узла 13 преобразования дрейфа напряИсключенные состояния входных сиг- 25 жения источника питания позволяет
налов h, ,Ьг, е едБПФН 14, не реализуемые при нормальной работе привода, отмечены в табл.2 символом х. Состояния 1,9,17,25 и 8,16, 24,32 соответствуют запрещенным сочетаниям 000 и 111 кодов е,-е знаков фазных напряжений, а состояния 9-16 - неиспользуемой комбинации 01 сигналов Ьг-Ь, ШИМ 9 и 10. Состояния 2-7 оп
ределяют динамическое торможение сер- водина (Ь,, ), состояния 26-31 задают текущую, а 18-23 - соседнюю ориентацию .
Карты Карно, заполненные на основе табл.2, позволяют получить минимизированные логические выражения для формирования выходных сигналов А,В,С БПФН 14 в виде;
,) hl-e,
(е1Ь1+е3Ь1) hv егЬа+е3Ь, г
(9) (Ю)
Cehfd h.+e,,) « , , (11)
что полностью соответствует схеме БПФН 14, приведенной на фиг.1.
Возможны также другие варианты реализации БПФН 14 на основе выражений (9)-(П).
Формирование тактовых импульсов УДЧ 11 с помощью узла 13 преобразования дрейфа напряжение БП 14 в частоту обеспечивает уменьшение пульсаций вращающего момента, обусловленных пульсациями и дрейфом напряжения U БП 14. Действительно, частота узла 13, а частота УДЧ 11 Ј„- , коэффициент заполнения импульсов ШИМ 9 и 10 Ci/T Vj/CfyT V./ /(KUT) сформируют среднее напряжение на выходе ПЧ:
U 4J /T-Vi G/ (KT)V GUm/ (2$-1) ( ) ,
возможное напряжение БП 14; S,d --разрядности ШИМ 9 и 10 и
УДЧ П.
r Последнее выражение свидетельствует об инвариантности привода к напряжению U БП 14, что обеспечивает по . сравнению с известным устройством уменьшения пульсаций вращения момен
где U - минимально
m
пряжения питания.
Таким образом, введение блока 14 преобразования фазных напряжений и узла 13 преобразования дрейфа напряулучшить массогабаритные и регулировочные характеристики электропривода за счет выполнения преобразователя частоты в виде трехфазного мостового инвертора при сохранении синусоидальности выходного напряжения и исключения влияния дрейфа напряжения источника питания.
Формула изобретения Вентильный электропривод с цифровым управлением, содержащий синхронный электродвигатель, якорная обмотка которого подключена к выходам преобразователя частоты, а вал механически связан с цифровым датчиком положения ротора, выходы которого через регистр угла с управляющим входом подключены к магистрали, подключенной к выходу программируемого блока управления , интерфейсный блок сопряжения с тремя выходами, входы которого подключены к магистрали, к первому выходу подключен управляющий вход регистра угла, к второму выходу подключены соответственно входы записи регистра знака с тремя выходи- ми, первого и второго широтно-им- пульсных модуляторов, кодовые входы которых подключены к магистрали, а тактовые входы подключены к выходу управляемого делителя частоты с частотным входом, кодовые входы которого подключены к магистрали через
регистр управляющего воздействия, вход записи которого подключен к третьему выходу интерфейсного блока, отличающийся тем, что, с целью улучшения массогабаритных и регулировочных характеристик, в него дополнительно введены узел преобразования дрейфа напряжения источника питания в частоту, подключенный к частотному входу управляемого делителя частоты, и блок преобразования фазных напряжений с пятью входами и тремя выходами, а преобразователь частоты выполнен в виде мостового трехфазного инвертора, при этом блок преобразования фазных напряжений выполнен в виде четырех логических инверторов, трех логических элементов 2И-2ШЖ-НЕ и трех логических элемен- тов 2И, выходы которых образуют три выхода блока преобразования фазных напряжений и подключены к входам управления трехфазного мостового инвертора, первый вход блока преоб- раэования фазных напряжений, подключенный к выходу второго широтно-им пульсного модулятора образован объединенными первыми входами логических элементов 2И, второй вход блока пре- образования фазных напряжений, подключенный к выходу первого широтно- импульсного модулятора, образован объединенными соответственно четвертым входом первого, третьим входом второго, третьим входом третьего логических элементов 2И-2ИЛИ-НЕ и
Таблица
-
Разложение вектора Р по векторам i, г
входом второго логического инвертора, третий вход блока преобразования фазных напряжений, подключенный к третьему выходу регистру знака, образован объединенными третьим входом первого логического элемента 2И-2И-НЕ и входом четвертого логического инвертора, четвертый вход блока преобразования фазных напряжений, подключенный к второму выходу регистра знака, образован объединенными соответственно входом первого логического инвертора и четвертым входом второго логического элемента 2И-2ИЛИ-НЕ, пятый вход блока преобразования фазных напряжений, подключенный к первому выходу регистра знака, образован объединенными соответственно входом третьего логического инвертора и четвертым входом третьего логического элемента 2И-2ШШ-НЕ, причем первый вход первого логического элемента 2И-2ШШ- НЕ подключен к выходу первого логического инвертора, к выходу второго логического инвертора подключены объединенные соответственно второй вход первого, первый вход второго и первый вход третьего логических элементов 2И-2НЛИ-НЕ, к выходам третьего и четвертого логических инверторов подключены соответственно вторые входы второго и третьего логических элементов 2И-2ИЛИ-НЕ, к выходам трех логических элементов 2И-2ШШ-НЕ подключены соот- ветственно вторые входы трех логических элементов 2И.
Таблица истинности БПФН 14
±ЕЫЗ
ЛЛ
ОГВ
Таблица
Фиг. 2
Фиг.З
i
ППП.ПДППГПЦППГТ1Г1ППППП
оллпг
ппппп
ПППГШ1ГШПЛ П
Л/3
оллпг
пппппппгтпппшш
пп пппппппг
ZHI3
л
5Я/3 f
Фиг Л
| Цифровое управление вентильным электродвигателем посредством микро- ЭВМ | |||
| Изв | |||
| ВУЗов | |||
| Электромеханика, 1982, № 6, с | |||
| Паровая машина с периодическим парообразователем | 1922 |
|
SU676A1 |
| Разработка и создание автоматизированных систем управления электромеханическими устройствами роботов и манипуляторов | |||
| Л., ЛДНТП, 1986, с | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
