Изобретение относится к области электротехники и, в частности, к электроприводам с линейными или вращающимися вентильными электродвигателями.
Известен электропривод, который содержит бесколлекторный двигатель с пристроенным тахогенератором и датчиком ротора, полупроводниковый выпрямитель, транзисторный регулятор в цепи постоянного тока тиристорный трехфазный мостовой коммутатор и трехфазный мост обратных диодов. Обмотки электродвигателя соединены по схеме звезда.
В этом электроприводе происходит двухкратное преобразование энергии, причем с разделением функций преобразования энергии и регулирования ее потока, что усложнило устройство в связи с необходимостью введения в него транзисторного регулятора и снизило надежность электропривода.
Известен тиристорный.
Указанный электропривод содержит бесколлекторный двигатель, обмотки которого включены в трехлучевую звезду с нуле- вым выводом, два управляемых тиристорных преобразователя с системами импульсно-фазового управления, три вспомогательных тиристора, усилитель управляющего органа второго тиристорного преобразователя.
Этот электродвигатель позволяет работать в двигательном режиме на высокой скорости с естественной коммутацией, а на низкой скорости с искусственной коммутацией и в режиме торможения, для чего в электроприводе имеются три задатчика угла управления с логическим устройством для их переключения и узел управления искусственной коммутацией.
Разделение функций управления режимами работы привело к усложнению схемы за счет введения задатчиков угла управления и дополнительного логического устройV4СП 00 СО ГО Ю
ства, снижающих надежность электропривода.
Наиболее близким решением к изобретению является вентильный двигатель. Ука- занный электропривод содержит синхронную машину, подключенную к сети переменного тока через преобразователь частоты, состоящий из тиристорных выпрямителя и инвертора, датчики положения и частоты вращения, связанные с валом двигателя, датчик тока, регуляторы частоты вра- щения и тока, блок управления, снабженный ШФУ, формирователь управляющих сигналов с подключением входа СИФУ к выходу регулятора тока, в входа формирователя - к выходу датчика положения ротора, идентификатор направлений то ка в фазе якорной обмотки, подключенный ко второму входу блока управления.
Преобразователь частоты, состоящий из тиристорных выпрямителя и инвертора, осуществляет двухкратное преобразование энергии и имеет низкую надежность из-за потери управляемости выпрямителя при изменении направления потока энергии.
Блок управления этим двигателем, содержащий переключатель чередования импульсов СИФУ инвертора, элемент неравнозначность и узел временной задержки, направлен на устранение бросков тока в начальный момент тормозного режима с рекуперацией энергии в сеть, вызванных необходимостью согласования работы составных частей преобразователя частоты.
Целью изобретения является упрощение конструкции и повышение надежности электропривода.
Эта цель достигается тем, что в электроприводе, содержащем m-фазный синхронный двигатель, на валу которого установлен датчик частоты вращения и положения ротора, m-фазный тирмсторный преобразооа- тель с входом для подключения сети и выходом, соединенным с фазными выводами якорной обмотки синхронного двигателя, блок управления, снабженный формирователем управляющих сигналов и системой импупьсно-фазового управления, при этом выход формирователя управляющих сигналов образует выход блока управления, подключенный к управляющему входу тиристорного преобразователя, вход системы импульсно-фазового управления образует первый вход блока управления, подключенный к выходу регулятора тока, входами соединенный с выходами датчика тока якорной обмотки синхронного двигателя и регулятора частоты вращения, входы которого подключены к выходам датчика и задзтчика частоты вращения, второй вход
блока управления, образованный первым входом формирователя управляющих сигналов, подключен к выходу датчика положения ротора, блок идентификации
направления тока в фазе якорной обмотки, вход которого соединен с выходом регулятора частоты вращения, а выход - с третьим аыходом блока управления, выполнен нулевой вывод обмотки для подключения к нейтральному проводу, тиристоры в каждой фазе преобразователя включены встречно- парйяледьжц Вяок идентификации направления тока;с«абжен дополнительным выходом, формироытель управляющих сигналов снабжен вторым, третьим и четвертым входами, при этом второй вход формирователя подключен к выходу системы импульсио-фазового управления и четвертый вход соединен с дополнительным
шход # бяока идентификации направления тока е фаз& якорной обметки.
Формирователь управляющих сигналов выполнен с возможностью реализации логической функции.
Т} ФНП}В + йЈН),
где Т; - сигнал на включение j-ro тиристора,
Фл - сигнал с выхода системы импульсно-фазового управления о возможности
включения -го тиристора,
П -сигнал на j-ом выходе датчика положения ротора,
rik Flj,
k -1 -5- m при J m,
k Jf - га при .
Суть изобретения состоит в объединении функций управления потоком энергии и коммутации обмоток в одном управляемом тиристорном преобразователе. Возмож5 ность объединения указанных функций обусловлена ветречно-параллельным соединением тиристоров в каждой фазе преобразователя, выполнением нулевого вывода обмотки для подключения к нейтральному
0 проводу, возможностью реализации формирователем управляющих сигналов логической функции включения тиристоров преобразователя, обеспечивающей работу электропривода как в установившемся (дви5 гательном, тормозном), так и переходных режимах.
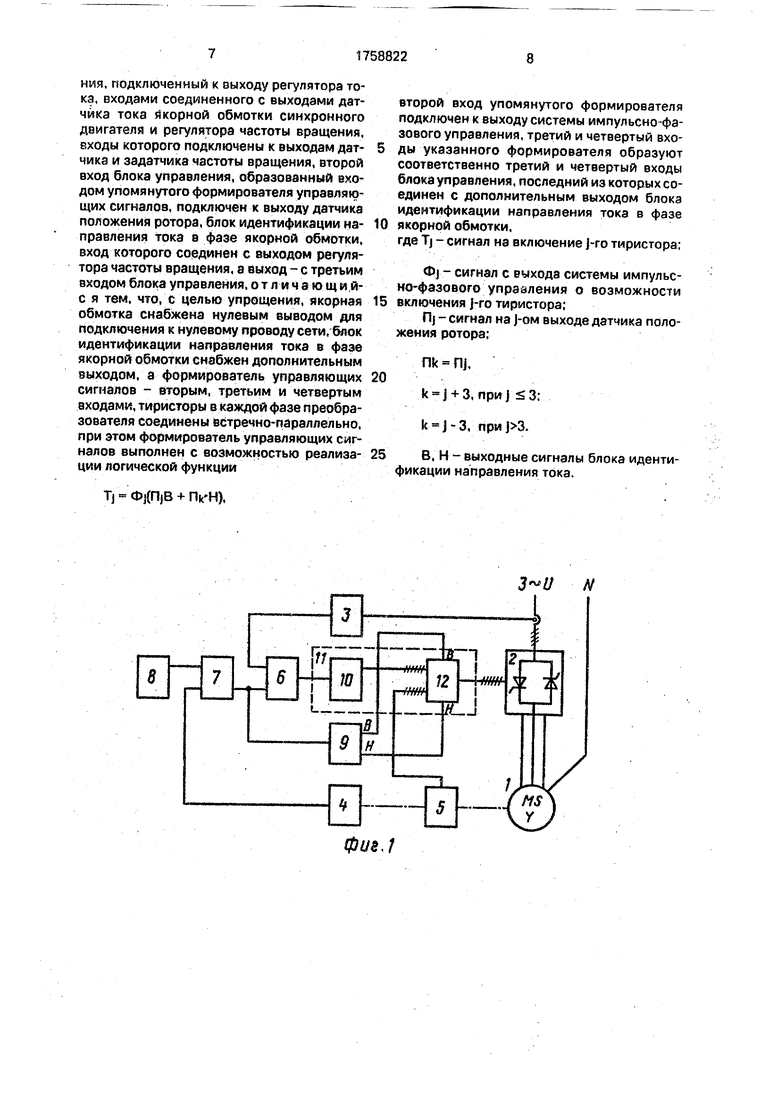
На фиг.1 изображена функциональная схема электропривода с вентильным двигателем, при числе фаз m 3; на фиг.2 - схема формирователя управляющих сигналов.
Электропривод содержит синхронный электродвигатель 1, обмотки которого г числом фаз m 3 соединены з трехлучевую звезду с нулевым выводом тирисгорш преобразователь 2. Пре- боазовател - гол- учает питание or трехфазной сетч Тирис .- ры преобразователя 2 включены встречно-параллельно ч каждой фазэ. Датчик тока 3 включен р рассечку линейных провоцов перед преобразочзтел ем 2, датчики скорости 4 и положения подвижной части Б ме анически связаны с подвижной частью двигателя 1.
Выход датчика тока 3 присоединен к первому входу регулятора тока 6, а выход датчика скорости 4 соединен с первым входом регулятора скорости 7. На второй вход регулятора скорости 7 поступает сигнал с задатчика частоты вращение 8.
Выход регулятора скорости 7 соединен со вторым входом регулятора тока 6 и входом блока идентификации направления тока 9. Выход регулятора тока 6 соединен с входом системы импульсно-фазового управления (СИФУ) 10, являющегося составной частью блока управления 11, в который также входит формироплте/r- г яю сигналов 1Л 1лоды формой ляющих сигналов соеди оны с ЙЬ, СИФУ 10, с выходами блока идонп фикэцик направление тока 9 и с выходами датчика полохенчя сдвижной чятти 5
ВЫХОДА формирователя 12 образует выход блока управления 1 I, подключенный к управляющему входу тиристорного преобразователя 2.
Устройство работает следующим образом.
На входы регулятора скорости 7 (фиг.1) подается сигнал задания скооости и сигнал обратной связи от датчика скорости 4. С выхода регулятора скорости 7 сигнал поступает на первый вход регулятора тока 6 и на вход блока 9 «идентификации напоавления тока. На второй вход ре1улчтора тока 6 подается сигнал обратной связи по току от датчика 3.
Блок 9 идентификации тока определяет знак задающего тока, при этом, когда с выхода регулятора скорости 7 на вход блока 9 поступает сигнал с положительным знзчэ- нием напряжения, на выходе Н блока S формируется сигнал низкого (нулевого) логического уровня, а на В выходе - сигнал высокого (единичного) уровня. При смене полярности входного напряжения сигналы высокого и низкого уровней на В- и Н-выхо- дах блока 9 меняются местами.
Выходной сигнал регулятора тока б, поступая на вход СИФУ 10, воздействует на
фазу импульсов возможного открывания тиристоров преобразователя 2. С выхода СИФУ 10 импульсы подаются на вход формирователя управляющих сигналов 12,
на пругие аходы которого приходят сигналы о выхода 9 идентификации направле- нь-я токз и с выхода датчика 5 положения подвижной масти двигателя 1.
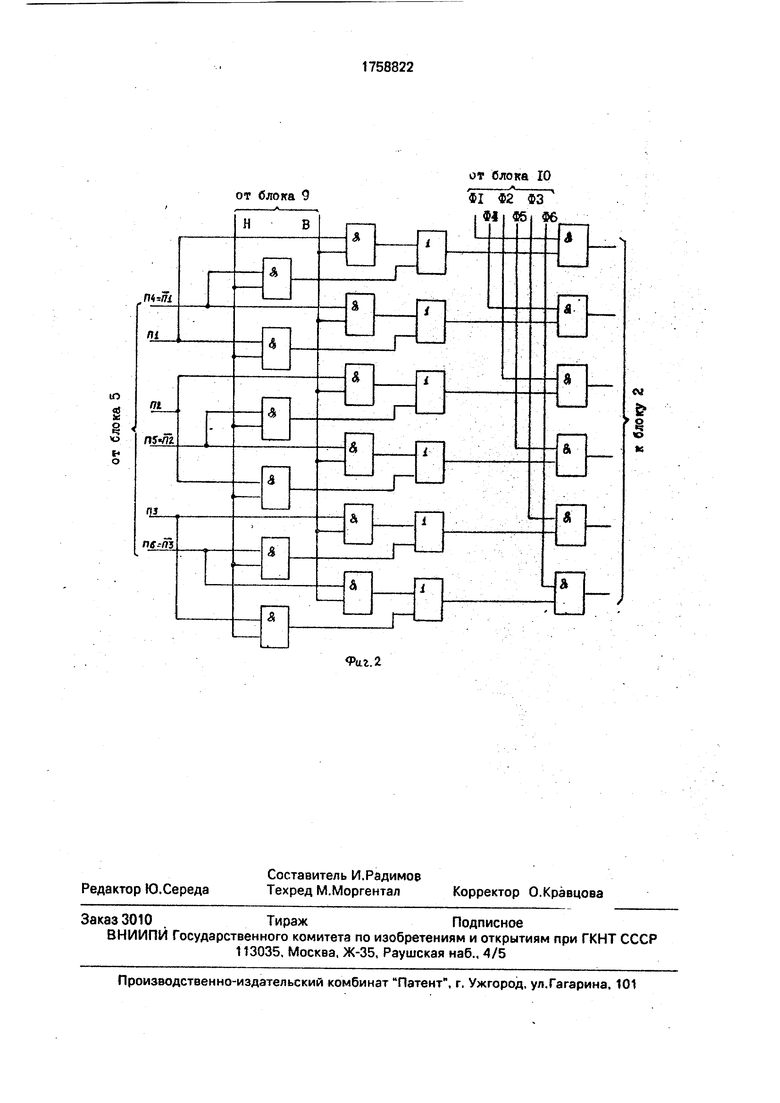
Схема формирователя управляющих
сигналов 12 из двухвходовых логических элементов И и ИЛИ приведена на фиг.2.
Формирователь сигналов формирует на выходах Т1, Т2, ГЗ, Т4, Т5 и Тб сигналы, управляющие тиристорным преобразокателем 2 в соответствии с логическим уравнением
Tj Ф)(П|В ь ),
гдеТ сигнел ,с гчпючение j-roтиристора, Ф - сигнал с выхода СИФУ 10 о возможности включения j-ro (Иристора;
П - сигнал на выходе датчика 5 положения подвижной части,
В и Н - выходлые с гналы блока 9 идентификации нэлраппени | тока,
- j -f 3, если J 3 и к J - 3, если .
Таким образом, электропривод выполняет последовательное применена направления тока в фазах обмотки двигателя в соответствие с перемещением подвижной части и обеспечивает однонаправленное
действие электромагнитных сил фаз обмотки двигателя, регулирует скорость, ограничивает ток якорной обмотки двигателя, осуществляет режимы торможения и реверса подвижной части при изменении направления тока в фазах обмотки на противоположное. Все режимы работы сопровождаются естественной коммутации тиристоров преобразователя.
Формула изобретения
Вентильный электропривод, содержащий m-фазный синхронный двигатель, на валу которого установлен датчик частоты вращения и датчик положения ротора, тфазный тиристорный преобразователь с входом для подключения к сети и выходом, соединенным с фазными выводами якорной обмотки синхронного двигателя, блок управления, снабженный формирователем управляющих сигналов, выход которого образует выход блока управления, подключенный к управляющему входу тиристорно- го преобразователя, системой импульсно-фазового управления, вход которого образует первый вход блока управления, подключенный к выходу регулятора тока, входами соединенного с выходами датчика тока икорной обмотки синхронного двигателя и регулятора частоты вращения, входы которого подключены к выходам датчика и задатчика частоты вращения, второй вход блока управления, образованный входом упомянутого формирователя управляющих сигналов, подключен к выходу датчика положения ротора, блок идентификации направления тока в фазе якорной обмотки, вход которого соединен с выходом регулятора частоты вращения, а выход - с третьим входом блока управления, отличающий- с я тем, что, с целью упрощения, якорная обмотка снабжена нулевым выводом для подключения к нулевому проводу сети, блок идентификации направления тока в фазе якорной обмотки снабжен дополнительным выходом, а формирователь управляющих сигналов - вторым, третьим и четвертым входами, тиристоры в каждой фазе преобразователя соединены встречно-параллельно, при этом формирователь управляющих сигналов выполнен с возможностью реализации логической функции
Tj - + IVH),
второй вход упомянутого формирователя подключен к выходу системы импульсно-фа- зового управления, третий и четвертый входы указанного формирователя образуют соответственно третий и четвертый входы блока управления, последний из которых соединен с дополнительным выходом блока идентификации направления тока в фазе якорной обмотки, где Tj - сигнал на включение j-ro тиристора;
Јj - сигнал с выхода системы импульс- но-фазового управления о возможности включения j-ro тиристора;
Clj - сигнал на J-ом выходе датчика положения ротора;
fik П|,
k j + 3, при) Ј3:
, .
0
5
0
25 В, Н - выходные сигналы блока идентификации направления тока.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регулирования скорости электродвигателя постоянного тока | 1986 |
|
SU1399875A1 |
| Способ регулирования скорости электродвигателя постоянного тока | 1986 |
|
SU1399881A1 |
| РЕВЕРСИВНЫЙ ТИРИСТОРНЫЙ ЭЛЕКТРОПРИВОД | 1992 |
|
RU2079963C1 |
| Способ регулирования частоты вращения электродвигателя переменного тока | 1987 |
|
SU1471277A1 |
| Вентильный электродвигатель | 1980 |
|
SU951582A1 |
| Электропривод переменного тока | 1987 |
|
SU1436260A1 |
| ТИРИСТОРНЫЙ ВОЗБУДИТЕЛЬ ЭЛЕКТРОПРИВОДА | 1993 |
|
RU2050661C1 |
| СПОСОБ ПЛАВНОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ С КОРОТКОЗАМКНУТЫМ РОТОРОМ | 2003 |
|
RU2256285C1 |
| Частотно-регулируемый электропривод грузоподъемного механизма | 1985 |
|
SU1365333A1 |
| Вентильный электродвигатель | 1977 |
|
SU692015A2 |
Использование: для приводов коорди-- натных столов станков для сверления и фрезерования печатных плат. Сущность: выполнение якорной обмотки синхронного двига- теля 1 с нулевым проводом для подключения к нулевому проводу сети и организации определенной логической функции в формирователе 12 управляющих сигналов позволяет обеспечить последовательное изменение направления тока в фазах якорной обмотки двигателя, регулировать его частоту вращения, осуществлять режимы торможения, реверс при ес- тественной коммутации тиристоров преобразователя 2. 2 ил.
фиг,
от блока 9
от блока 10
«I Ф2 ФЗ
| Чернов Е.А., Кузьмин В.П | |||
| Комплектные электроприводы станков с ЧПУ | |||
| Справочное пособие | |||
| Горький, 1989 | |||
| Информация Информэлектро | |||
| Вып | |||
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Вентильный электродвигатель | 1985 |
|
SU1267578A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
