полосок, обеспечивающих силовое замыкание в регулировочном механизме.
Несмотря на исключительную простоту и технологичность конструкции это устройство имеет недостатки, такие как неудобст- во в эксплуатации, обусловленное тем, что в качестве регулировочных элементов используются винты, требующие ограничителей хода в прямом и обратном направлении перемещения, что усложняет конструкцию при дистанционном управлении. Кроме того, устройство не надежно в работе при воздействии внешних факторов окружающей среды (тряски, вибрации, перепад температуры и т.д.) и не может обеспечить совре- менные требования по точности и чувствительности юстировки, поскольку оно состоит из отдельных состыкованных конструктивных элементов, имеющих погрешности изготовления, и винтовых кинематических пар без надежной фиксации.
Наиболее близким по технической сущности и достигаемому результату к предлагаемому является устройство, содержащее держатель, образованный подвижным и неподвижным основаниями и промежуточной пластиной, которые последовательно соединены шарнирами внутреннего трения, ориентированными взаимно перпендику- лярно, и регулировочный механизм, содержащий две эксцентриковые цапфы со сферическими головками, размещенными в упругих гнездах с возможностью взаимодействия с подвижным основанием, Шарни- ры внутреннего трения выполнены в виде упругих перемычек, каждая из которых об- разоёана двумя цилиндрическими поверхностями, обращенными выпуклостью одна к другой, при этом оси шарниров размещены в одной плоскости, эксцентриковые цапфы размещены в неподвижном основании и в промежуточной пластине, упругие гнезда выполнены в виде упругих планок с прорезью, установленных на подвижном осно- вании по направлениям юстировки.
Основным достоинством устройства является размещение осей упругих шарниров в одной плоскости, что позволяет иметь практически общую точку поворота объекта по двум взаимно перпендикулярным направлениям (карданный подвес).
Однако устройство сложно конструктивно и требует специальной технологии изготовления, особенно в части разделения оснований и промежуточной пластины после выполнения упругих перемычек, а также не совсем удобно в эксплуатации в результате расположения регулировочных элементов по двум направлениям, что вызывает
определенные трудности при групповой установке испытуемых объектов в приспособлениях контрольно-испытательной аппаратуры.
Целью изобретения является упрощение конструкции и повышение удобства в эксплуатации путем изменения взаимного расположения оснований с промежуточной пластиной в держателе и применения коаксиальной установки эксцентриковых цапф.
Поставленная цель достигается тем, что в котировочном модуле, содержащем держатель, образованный подвижным и неподвижным основаниями и промежуточной пластиной, которые последовательно соединены шарнирами внутреннего трения, ориентированными взаимно перпендикулярно, и регулировочный механизм, содержащий две эксцентриковые цапфы со сферическими головками, размещенными в упругих гнездах с возможностью взаимодействия с подвижным основанием, промежуточная пластина имеет П-образную форму, а шарниры внутреннего трения расположены во взаимно перпендикулярных плоскостях. Эксцентриковые цапфы установлены коаксиально в неподвижном основании по оси симметрии подвижного основания и в плоскости его шарнира, а упругие гнезда выполнены в виде дисков с радиальными сквозными пазами и параллельными им замкнутыми прорезями и уста- новлены друг за другом в стакане, закрепленном на подвижном основании, причем диски один относительно другого развернуты пазами по направлениям шарниров.
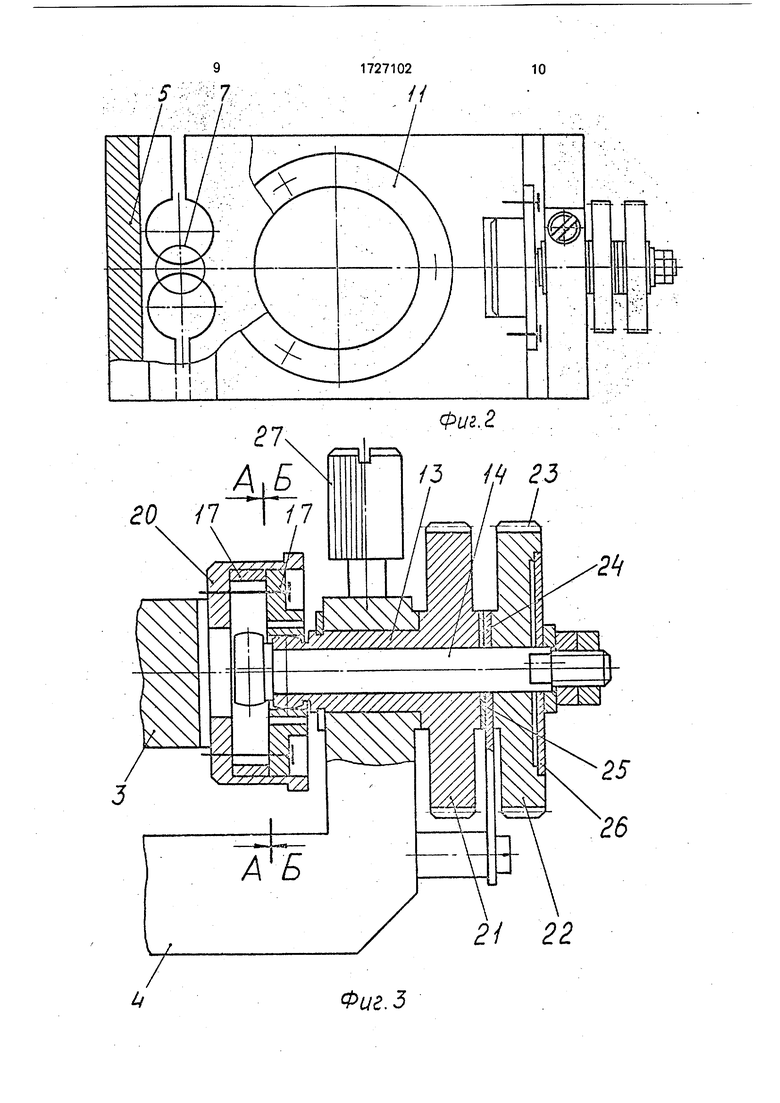
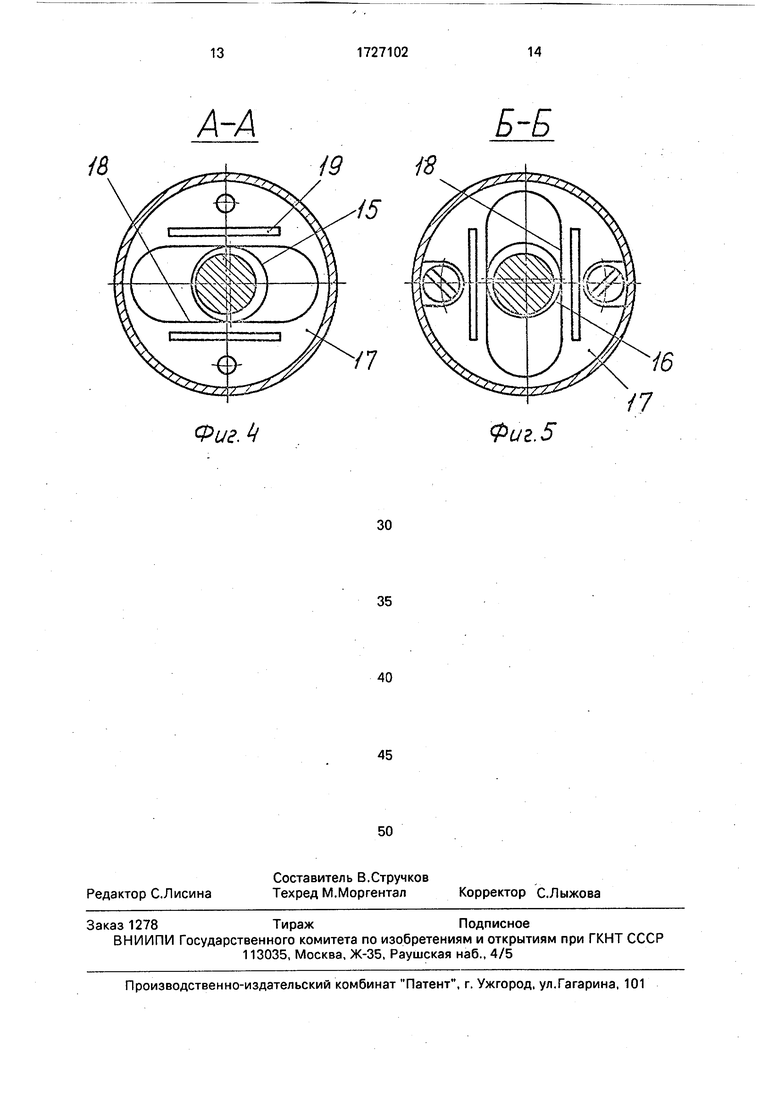
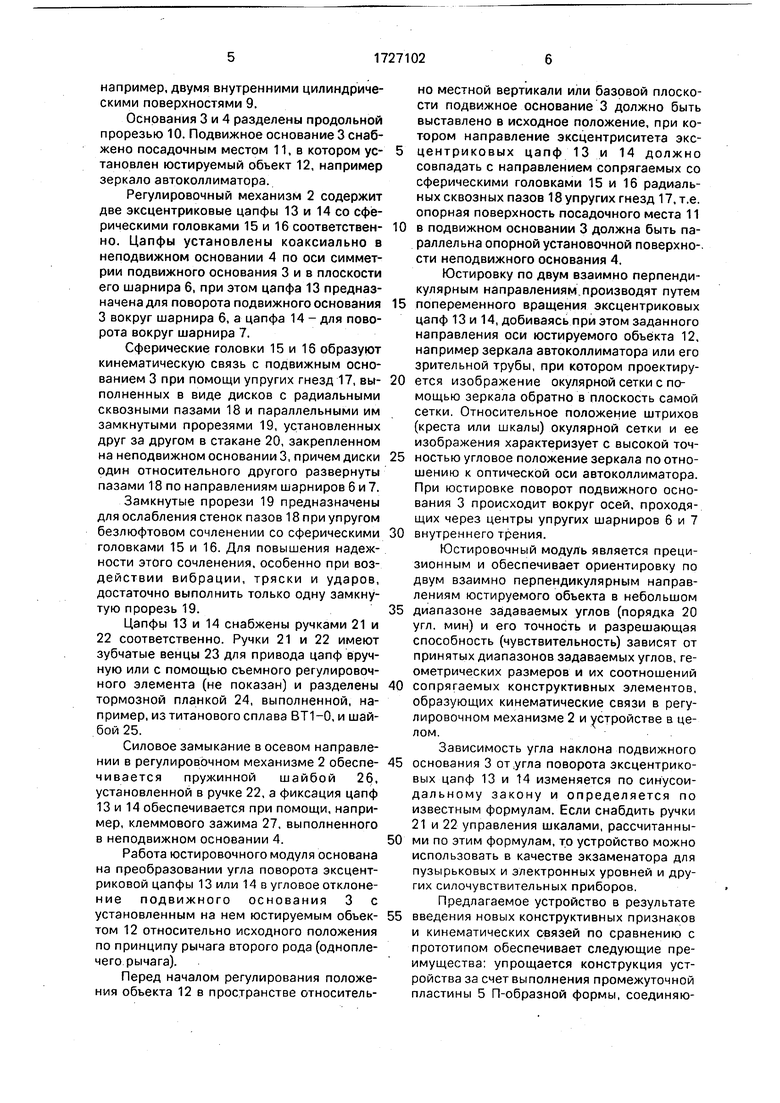
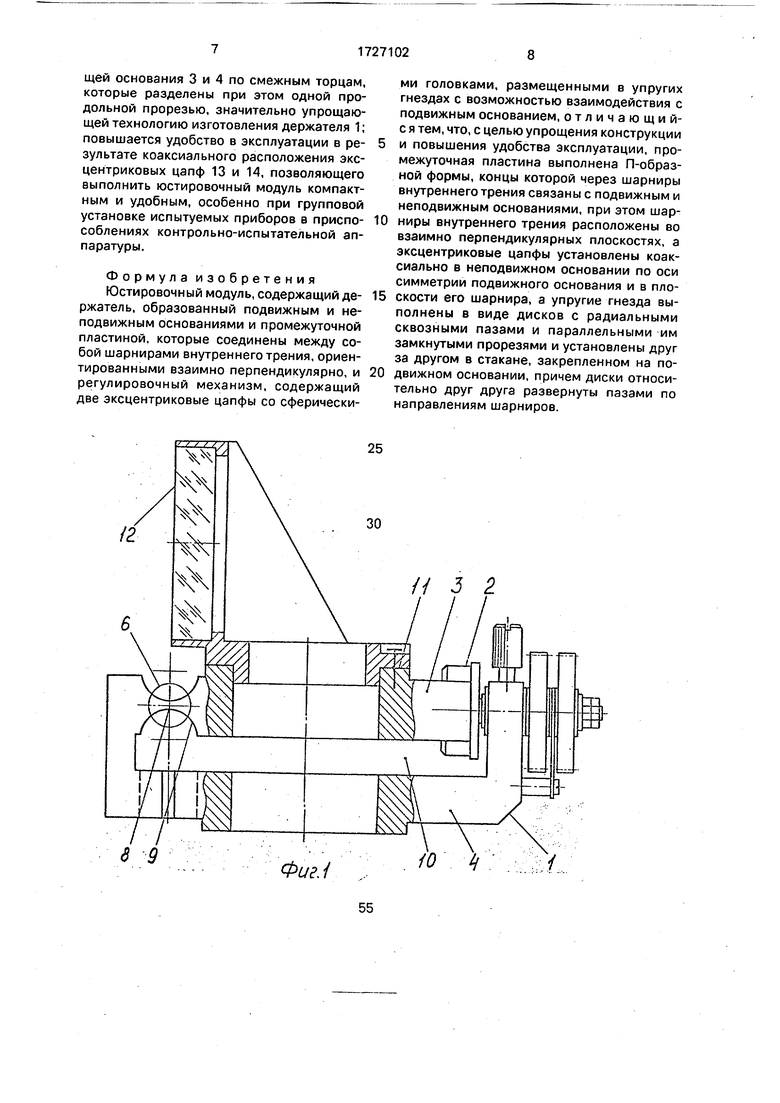
На фиг. 1 представлена конструкция юс- тировочного модуля с установленным на нем зеркалом, например, автоколлиматора; на фиг. 2 - то же, вид сверху без юстируемого объекта; на фиг. 3 - регулировочный механизм (увеличено) в исходном положении; на фиг. 4 - разрез А-А на фиг. 3; на фиг. 5 - разрез Б-Б на фиг. 3.
Котировочный модуль содержит держатель 1 и регулировочный механизм 2. Держатель 1 образован подвижным основанием 3, неподвижным основанием 4 и промежуточной пластиной 5, выполненной П-образной формы. Пластина 5 одним концом соединена с подвижным основанием 3 при помощи шарнира 6 внутреннего трения, а другим концом соединена с неподвижным основанием 4 при помощи шарнира 7 внутреннего трения, при этом шарниры расположены во взаимно перпендикулярных плоскостях. Каждый шарнир выполнен в виде упругой перемычки 8, образованной,
например, двумя внутренними цилиндрическими поверхностями 9.
Основания 3 и 4 разделены продольной прорезью 10. Подвижное основание 3 снабжено посадочным местом 11, в котором установлен юстируемый объект 12, например зеркало автоколлиматора.
Регулировочный механизм 2 содержит две эксцентриковые цапфы 13 и 14 со сферическими головками 15 и 16 соответственно. Цапфы установлены коаксиально в неподвижном основании 4 по оси симметрии подвижного основания 3 и в плоскости его шарнира б, при этом цапфа 13 предназначена для поворота подвижного основания 3 вокруг шарнира 6, а цапфа 14 - для поворота вокруг шарнира 7.
Сферические головки 15 и 16 образуют кинематическую связь с подвижным основанием 3 при помощи упругих гнезд 17, выполненных в виде дисков с радиальными сквозными пазами 18 и параллельными им замкнутыми прорезями 19, установленных друг за другом в стакане 20, закрепленном на неподвижном основании 3, причем диски один относительного другого развернуты пазами 18 по направлениям шарниров 6 и 7.
Замкнутые прорези 19 предназначены для ослабления стенок пазов 18 при упругом безлюфтовом сочленении со сферическими головками 15 и 16. Для повышения надежности этого сочленения, особенно при воздействии вибрации, тряски и ударов, достаточно выполнить только одну замкнутую прорезь 19.
Цапфы 13 и 14 снабжены ручками 21 и 22 соответственно. Ручки 21 и 22 имеют зубчатые венцы 23 для привода цапф вручную или с помощью съемного регулировочного элемента (не показан) и разделены тормозной планкой 24, выполненной, например, из титанового сплава ВТ1-0, и шайбой 25.
Силовое замыкание в осевом направлении в регулировочном механизме 2 обеспечивается пружинной шайбой 26, установленной в ручке 22, а фиксация цапф 13 и 14 обеспечивается при помощи, например, клеммового зажима 27, выполненного в неподвижном основании 4.
Работа котировочного модуля основана на преобразовании угла поворота эксцентриковой цапфы 13 или 14 в угловое отклонение подвижного основания 3 с установленным на нем юстируемым объектом 12 относительно исходного положения по принципу рычага второго рода (одноплечего рычага).
Перед началом регулирования положения объекта 12 в пространстве относительно местной вертикали или базовой плоскости подвижное основание 3 должно быть выставлено в исходное положение, при котором направление эксцентриситета эксцентриковых цапф 13 и 14 должно совпадать с направлением сопрягаемых со сферическими головками 15 и 16 радиальных сквозных пазов 18 упругих гнезд 17, т.е. опорная поверхность посадочного места 11
0 в подвижном основании 3 должна быть параллельна опорной установочной поверхности неподвижного основания 4.
Юстировку по двум взаимно перпендикулярным направлениям.производят путем
5 попеременного вращения эксцентриковых цапф 13 и 14, добиваясь при этом заданного направления оси юстируемого объекта 12, например зеркала автоколлиматора или его зрительной трубы, при котором проектиру0 ется изображение окулярной сетки с помощью зеркала обратно в плоскость самой сетки. Относительное положение штрихов (креста или шкалы) окулярной сетки и ее изображения характеризует с высокой точ5 ностью угловое положение зеркала по отношению к оптической оси автоколлиматора. При юстировке поворот подвижного основания 3 происходит вокруг осей, проходящих через центры упругих шарниров 6 и 7
0 внутреннего трения.
Котировочный модуль является прецизионным и обеспечивает ориентировку по двум взаимно перпендикулярным направлениям юстируемого объекта в небольшом
5 диапазоне задаваемых углов (порядка 20 угл. мин) и его точность и разрешающая способность (чувствительность) зависят от принятых диапазонов задаваемых углов, геометрических размеров и их соотношений
0 сопрягаемых конструктивных элементов, образующих кинематические связи в регулировочном механизме 2 и устройстве в целом.
Зависимость угла наклона подвижного
5 основания 3 от угла поворота эксцентриковых цапф 13 и 14 изменяется по синусоидальному закону и определяется по известным формулам. Если снабдить ручки 21 и 22 управления шкалами, рассчитанны0 ми по этим формулам, то устройство можно использовать в качестве экзаменатора для пузырьковых и электронных уровней и других силочувствительных приборов.
Предлагаемое устройство в результате
5 введения новых конструктивных признаков и кинематических связей по сравнению с прототипом обеспечивает следующие преимущества: упрощается конструкция устройства за счет выполнения промежуточной пластины 5 П-образной формы, соединяющей основания 3 и 4 по смежным торцам, которые разделены при этом одной продольной прорезью, значительно упрощающей технологию изготовления держателя 1; повышается удобство в эксплуатации в результате коаксиального расположения эксцентриковых цапф 13 и 14, позволяющего выполнить котировочный модуль компактным и удобным, особенно при групповой установке испытуемых приборов в приспособлениях контрольно-испытательной аппаратуры.
Формула изобретения Котировочный модуль, содержащий держатель, образованный подвижным и неподвижным основаниями и промежуточной пластиной, которые соединены между собой шарнирами внутреннего трения, ориентированными взаимно перпендикулярно, и регулировочный механизм, содержащий две эксцентриковые цапфы со сферическими головками, размещенными в упругих гнездах с возможностью взаимодействия с подвижным основанием, отличающий- с я тем, что, с целью упрощения конструкции
и повышения удобства эксплуатации, промежуточная пластина выполнена Л-образ- ной формы, концы которой через шарниры внутреннего трения связаны с подвижным и неподвижным основаниями, при этом шарниры внутреннего трения расположены во взаимно перпендикулярных плоскостях, а эксцентриковые цапфы установлены коак- сиально в неподвижном основании по оси симметрии подвижного основания и в плоскости его шарнира, а упругие гнезда выполнены в виде дисков с радиальными сквозными пазами и параллельными им замкнутыми прорезями и установлены друг за другом в стакане, закрепленном на подвижном основании, причем диски относительно друг друга развернуты пазами по направлениям шарниров.
Фиг.Ъ
Фиг. 5
| название | год | авторы | номер документа |
|---|---|---|---|
| Юстировочный модуль | 1991 |
|
SU1793409A1 |
| Юстировочное устройство | 1989 |
|
SU1700515A1 |
| Юстировочное устройство | 1989 |
|
SU1622869A1 |
| Юстировочное устройство | 1985 |
|
SU1318967A1 |
| Юстировочное устройство | 1989 |
|
SU1707588A1 |
| Юстировочное устройство | 1990 |
|
SU1760515A1 |
| Юстировочное устройство | 1989 |
|
SU1732316A1 |
| Устройство для юстировки оптического элемента | 1990 |
|
SU1781660A1 |
| Устройство для линейной юстировки | 1988 |
|
SU1748196A1 |
| ЮСТИРОВОЧНОЕ УСТРОЙСТВО | 2019 |
|
RU2729953C1 |