Изобретение относится к точному приборостроению и может быть использовано для угловой регулировки оптических элементов в измерительных приборах с повышенной плотностью компоновки, а также, например, в .качестве манипулятора в устройствах для технологических процессов микрорадиоэлектроники или регулятора усилия и времени срабатывания нажимных коммутирующих элементов в устройствах электроавтоматики.
Известно устройство для юстировки оптических элементов, содержащее подвижную и неподвижную части, связанные между собой упругим шарниром, и регулиг ровочный элемент, установленный с возможностью взаимодействия с этими частями, в котором регулировочный элемент выполнен в виде винта, образующего кинематическую связь с подвижной и неподвижной частями посредством цилиндрической пружины, закрепленной концами на этих частях, при этом шар резьбы винта, ввернутого в пружину, больше ее шага навивки.
Основными недостатками этого устройства являются неудобство эксплуатации, обусловленное тем, что в качестверегулиро- вочн ого элемента используется винт, требующий ограничителей прямого и обратного хода, это обстоятельство значительно усложняет конструкцию при дистанционном управлении, и сравнительно большие габариты в направлении юстировки из-за поэтажного расположения подвижной и неподвижной частей конструкции, а также за счет поперечного расположения регулировочного элемента.
Известно также устройство для юстировки оптических элементов, которое может быть принято в качестве прототипа. Устройство содержит подвижную и неподвижную части, связанные между собой упругим шарниром, и регулировочный элемент, установленный с возможностью взаимодействия с этими частями, при этом регулировочный элемент выполнен в виде резьбовой шпильки с дифференциальной резьбой, центральная часть которой выполнена в виде торсиона.
Основными недостатками этого устройства являются неудобство эксплуатации, обусловленное тем, что в качестве регулировочного элемента используется резьбовая шпилька, требующая ограничителей хода в прямом и обратном направлении перемещения, это обстоятельство значительно усложняет конструкцию при дистанционном управлении, и сравнительно большие габариты в направлении юстировки из-за поэтажного расположения подвижной и неподвижной частей конструкции, а также за счет поперечного расположения регулировочного элемента.
Целью изобретения является повышение удобства эксплуатации, уменьшение габаритов в направлении юстировки, а также повышение надежности и упрощение конструкции.
0 Цель достигается тем, что в юстировоч- ном модуле, содержащем подвижную и неподвижную части, связанные между собой упругим шарниром, и регулировочный элемент/установленный с возможностью взаи5 модействия с этими частями, подвижная и неподвижная части модуля, а также регулировочный элемент расположены последовательно в одной плоскости с упругим шарниром, регулировочный элемент выпол0 нен в виде эксцентриковой цапфы, расположен п.о центру упругого шарнира и кинематически связан с одной из частей модуля при помощи цапфы и фиксатора, а с другой .при помощи рабочего элемента, а
5 также за счет того, что рабочий элемент эксцентриковой цапфы выполнен в виде кривошипа, кинематически связанного с одной из частей модуля посредством цилиндрического ползуна, установленного с возможностью
0 перемещения в направляющем отверстии, выполненном в теле модуля перпендикулярно оси расположения регулировочного элемента, при этом ось кривошипа пересекает ось цилиндрического ползуна, а также за
5 счет того, что рабочий элемент эксцентриковой цапфы выполнен в виде сферического эксцентрика, который расположен в поперечном пазу,, выполненном в теле модуля по оси симметрии упругого шарнира.
0 в результате поиска среди патентной и другой научно-технической литературы не обнаружены технические решения, в которых содержится совокупность отличительных признаков, характеризующих
5 заявляемое техническое решение, и проявляющие аналогичные свойства.
На фиг. 1 представлен котировочный модуль согласно пп. 1и 2 формулы изобретения; на фиг. 2 - вид сверху этого модуля
0 на фиг. 1; на фиг. 3 - котировочный модуль согласно пп. и 3 формулы изобретения: на фиг. 4 - вид справа этого модуля на фиг. 3; на фиг. 5 - представлено юстировочное устройство, составленное из двух модулей, по5 казанных на фиг. 1 и 2 (отличаются расположением стыковочных элементов), и обеспечивающего юстировку по двум ортогональным направлениям,
Котировочный модуль по первому варианту (см.фиг. 1 и 2) содержит подвижную
часть 1 и неподвижную часть 2, связанные между собой упругим шарниром 3, и регулировочный элемент 4, установленный с возможностью взаимодействия с этими частями. Подвижная и неподвижная части 1 и 2 модуля расположены последовательно в одной плоскости с упругим шарниром 3 и выполнены с ним за одно целое. Регулировочный элемент 4 выполнен в виде эксцентриковой ступенчатой цапфы 5, расположен по центру упругого шарнира 3 с гарантированным боковым зазором 6 и кинематически связан с одной из частей модуля, например неподвижной 2, при помощи цапфы 5 (ее утолщенной части) и фиксатора 7, а с другой - при помощи рабочего элемента, выполненного в виде кривошипа 8, кинематически связанного с одной из частей модуля, например подвижной 1, посредством цилиндрического ползуна 9, установленного с возможностью перемещения в направляющем отверстии 10, выполненном в теле модуля перпендикулярно оси расположения регулировочного элемента 4, при этом ось кривошипа 8 пересекает ось цилиндрического ползуна 9.
Котировочный модуль по второму варианту (см,фиг.3 и 4) содержит подвижную часть 11 и неподвижную часть 12, упругий шарнир 13 и регулировочный элемент 14, выполненный в виде эксцентриковой ступенчатой цапфы 15 с рабочим элементом в виде сферического эксцентрика 16, который расположен в поперечном пазу 17, выполненном в теле модуля, например в его не- подвижной части 12, по оси симметрии упругого шарнира 13. Цапфа 15 установлена, например, в подвижной части 11 модуля при.помощи фиксатора 18.
Работа котировочного модуля основана на преобразовании угла поворота регу- лировочного элемента 4 (14) в угловое отклонение подвижной части 1 (11) модуля вокруг поперечной оси упругого шарнира 3 (13).
Регулировка углового положения.объек- та при помощи юстировочного модуля производится следующим образом. Регулируемый объект например зеркало, устанавливается и закрепляется на подвижной части 1 модуля, Затем регулировочный элемент поворотом в любую сторону устанавливают в исходное положение, при котором направление максимального значения эксцентриситета е рабочего элемента - кривошипа 8 эксцентриковой цапфы совпадает с направлением поперечной оси упругого шарнира 3. После этого производится регулировка, юстируемого объекта от исходного положения, Контроль угла наклона юстируемого объекта может производиться по отраженному лучу источника излучения, например автоколлиматора, или по круговой шкале, которой может быть снабжена экс- 5 центриковая цапфа 5. При плавном повороте эксцентриковой цапфы 5 е& кривошип 8 (его ось) совершает круговое движение по радиусу, равному эксцентриситету е. При этом цилиндрический ползун 9 совершает
0 возвратно-поступательное движение в направляющем отверстии 10, а его ось - вертикальное параллельное перемещение, за счет которого происходит угловое отклонение подвижной части 1 модуля вокруг попе5 речной оси упругого шарнира 3.
Для использования юстировочного модуля в качестве микроманипулятора с дистанционным управлением эксцентриковую цапфу 5 необходимо снабдить приводом и
0 датчиком угла поворота, причем в качестве привода желательно использовать пьезоэлектрический двигатель с кольцевым осциллятором.
Котировочный модуль обеспечивает
5 регулировку углового положения юстируемого объекта только в одном направлений. Для обеспечения регулировки по двум ортогональным направлениям можно собрать котировочное устройство (см.фиг. 5) из двух
0 модулей, соединив их при помощи жесткой переходной s-образной планки 19. При этом модули необходимо установить относительно друг друга таким образом, чтобы поперечные оси их упругих шарниров были
5 направлены по двум взаимно перпендикулярным направлениям.
Зависимость угла наклона подвижной части 1 модуля от угла поворота эксцентриковой цапфы 5 изменяется по синусоидаль0 ному закону и определяется по известным формулам.
Заявляемое техническое решение благодаря введению новых конструктивных признаков и кинематических связей по
5 сравнению с прототипом обеспечивает следующие преимущества.
Значительно повышается удобство эксплуатации за счет обеспечения компактности конструкции, позволяющей групповую
0 установку котировочных модулей, например, в контрольно-испытательных приспособлениях, а также за счет использования, эксцентриковой цапфы, расположенной ло оси симметрии упругого шарнира, что по5 зволяет сравнительно просто обеспечить дистанционное управление.
Значительно, примерно в два раза, уменьшаются габариты в направлении юстировки за счет последовательного расположения подвижной и неподвижной частей модуля, а
также регулировочного элемента в одной плоскости с упругим шарниром.
Повышается надежность конструкции за счет выполнения рабочего элемента эксцентриковой цапфы в виде кривошипа, образующего кинематическую связь с одной из частей модуля посредством цилиндрического ползуна, т.е. подвижные соединения образованы цилиндрическими парами, в которых по примеру подшипника скольжения цапфа непосредственно скользит по опорной поверхности.
Упрощаются конструкция и технология изготовления модуля за счет последовательного расположения подвижной и неподвижной его частей в одной плоскости с
0
5
упругим шарниром, выполненным с этими частями за одно целое, а также за счет центрального расположения регулировочного элемента, выполненного в виде эксцентриковой цапфы с рабочим элементом в виде сферического эксцентрика, образующего кинематическую связь с одной из частей .модуля при помощи паза, выполненного в его теле.
Расширяются возможности использования юстировочного модуля в качестве ис- полнительногомеханизма с дистанционным управлением за счет компактности конструкции и применения эксцентриковой цапфы, не требующей ограничителей поворота в любую сторону.


| название | год | авторы | номер документа |
|---|---|---|---|
| Юстировочный модуль | 1990 |
|
SU1727102A1 |
| Юстировочное устройство | 1989 |
|
SU1732316A1 |
| Юстировочное устройство | 1989 |
|
SU1707588A1 |
| Юстировочное устройство | 1989 |
|
SU1700515A1 |
| Юстировочное устройство | 1990 |
|
SU1760515A1 |
| Юстировочное устройство | 1989 |
|
SU1622869A1 |
| ЮСТИРОВОЧНОЕ УСТРОЙСТВО | 2019 |
|
RU2729953C1 |
| ЮСТИРОВОЧНОЕ УСТРОЙСТВО | 2013 |
|
RU2541728C1 |
| Юстировочное устройство | 1985 |
|
SU1318967A1 |
| Юстировочное устройство | 1987 |
|
SU1492340A1 |

Использование: точное приборостроение. Сущность изобретения: котировочный модуль содержит подвижную и неподвижную части 1 и 2, связанные между собой упругим шарниром 3, и регулировочный элемент 4, установленный с возможностью взаимодействия с этими частями. Подвижная и неподвижная части 1 и 2 модуля, а также регулировочный элемент 4 расположены последовательно в одной плоскости с упругим шарниром 3. Регулировочный элемент4 выполнен в виде эксцентриковой цапфы 5, рас- положен по центру упругого шарнира 3 и кинематически связан с одной из частей модуля при помощи цапфы 5 и фиксатора, а с другой при помощи рабочего элемента, выполненного в виде кривошипа 8 и цилиндрического ползуна 9, установленного с возможностью перемещения в направляющем отверстии, выполненном в теле модуля перпенидкулярно оси располохсеяия регулировочного элемента 4. При этом ось кривошипа 8 пересекает ось цилиндрического ползуна 9. 2 з.п.ф-лы, 5 ил.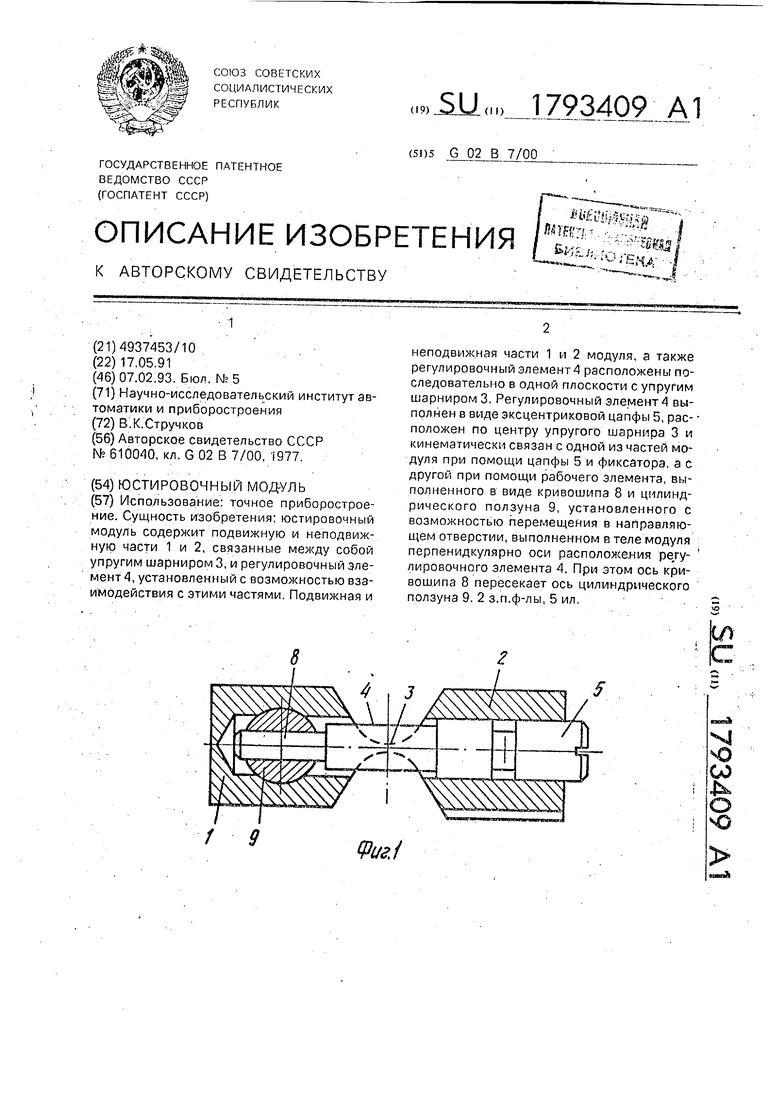
Формула изобретения . 1. Юстировочный -модуль, содержащий
Подвижную и неподвижную части, связан ные между собой упругим шарниром,.и регулировочный, элемент,, установленный с
возможностью взаимодействия с этими частями, отличающийся тем, что, с целью повышения удобства в эксплуатации м уменьшения габаритов в направлении юстировки, подвижная и неподвижная части модуля, а также регулировочный элемент расположены последовательно в одной плоскости с упругим шарниром, регулировочный -элемент .выполнен, в виде эксцентриковой цапфы, расположен по центру упругого шарнира и кинематически связан с одной из частей модуля при помощи .Цапфы и фиксатора, а с другой при помощи рабочего элемента. .;.:..
ФигЛ
| Устройство для юстировки оптических элементов | 1977 |
|
SU610040A1 |
| Шеститрубный элемент пароперегревателя в жаровых трубках | 1918 |
|
SU1977A1 |
