Изобретение относится к изоляционно-укладочным работам, а именно к управлению курсовым движением крана-трубоукладчика, работающего в со- ставе изоляционно-укладочной колонны (ИУК).
На движущийся в составе ИУК трубоукладчик действует ряд возмущающих факторов, приводящих к отклонению его от заданного курса движения.
Известен способ управления краном- трубоукладчиком с троллейной подвеской, реализованный и описанный в работе устройства, а именно троллейной подвески, содержащей датчик и задатчик угла отклонения грузового полиспаста от оси стрелы в плоскости разворота машины, позиционный регулятор и привод хода троллейной подвески. Данный способ является прототипом и позволяет управлять курсовым движением трубоукладчика, находящегося под нагрузкой, не снижая при этом темпов движения ИУК.
Недостаток известного способа заключается в низкой точности, поскольку величина и направление компонента разворачивающего момента (разворачивающей силы) определяется не только одной переменной (указанным выше углом), а еще рядом переменных параметров, таких как усилие в грузовом полиспасте, угол отклонения грузового полиспаста в поперечной плоскости машины и угол наклона стрелы, что не учитывается в прототипе. Перечисленные переменные, имеющие случайный характер, воздействуя на разворачивающую силу, вносят в управляющий сигнал мультипликативные составляющие, ввиду чего снижается точность управления курсовым движением крана-трубоукладчика.
Целью изобретения является повышение точности управления.
Поставленная цель достигается тем, что в способе управления краном-трубоукладчиком с троллейной подвеской путем измерения информационного параметра.
(Л
С
vi ю
00
Х
сравнения его с заданным уровнем и изменения положения подвески в зависимости от сигнала рассогласования в качестве информационного параметра принимается разность продольных усилий двух составля- ющих стрелы в плоскости разворота крана.
Именно предлагаемая совокупность отличительных признаков с их связями между собой обеспечивает, регулирование результатов измерения и сравнения между-собой по величине и направлению в плоскости разворота трубоукладчика усилий в двух со- ставляющих ее стрелы.
Сравнение предлагаемого и известного технических решений позволило устано- вить соответствие их критерию новизна. Введение нового информационного параметра приводит к тому, что предлагаемое решение проявляет новое свойство, не присущее ранее известным объектам - свойст- во регулирования положения троллейной подвески с учетом всех вышеперечисленных факторов разворачивающей силы. Поэтому техническое решение соответствует критерию существенные отличия.
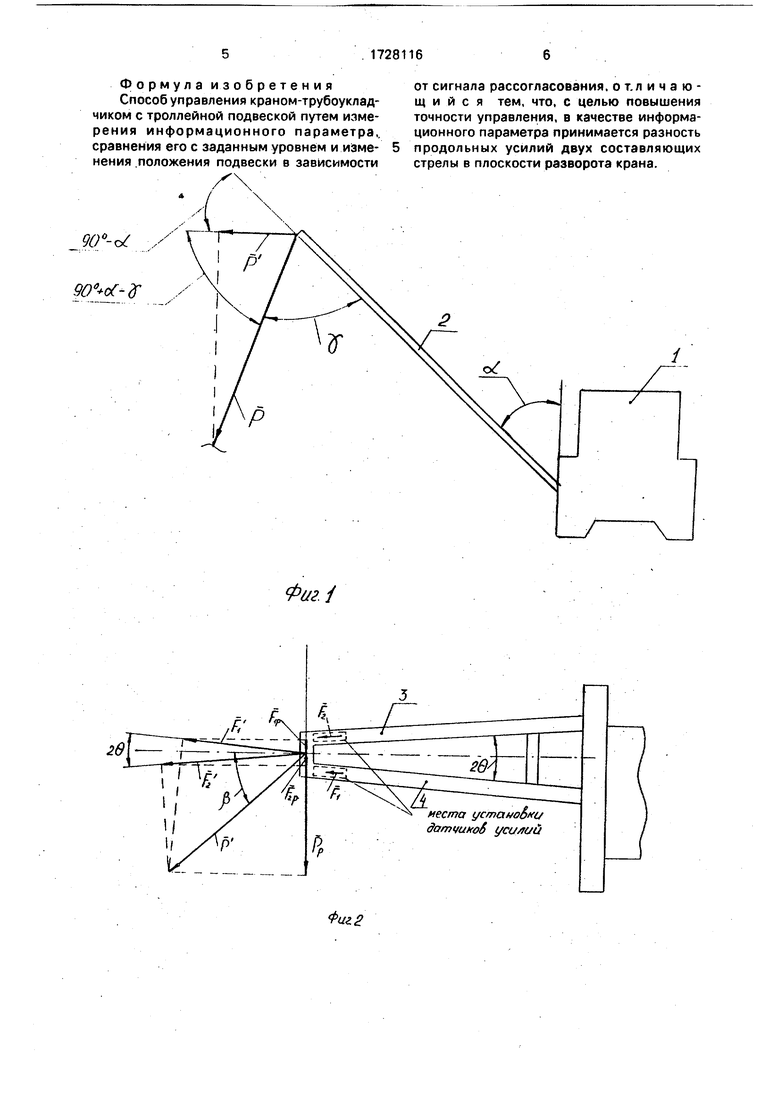
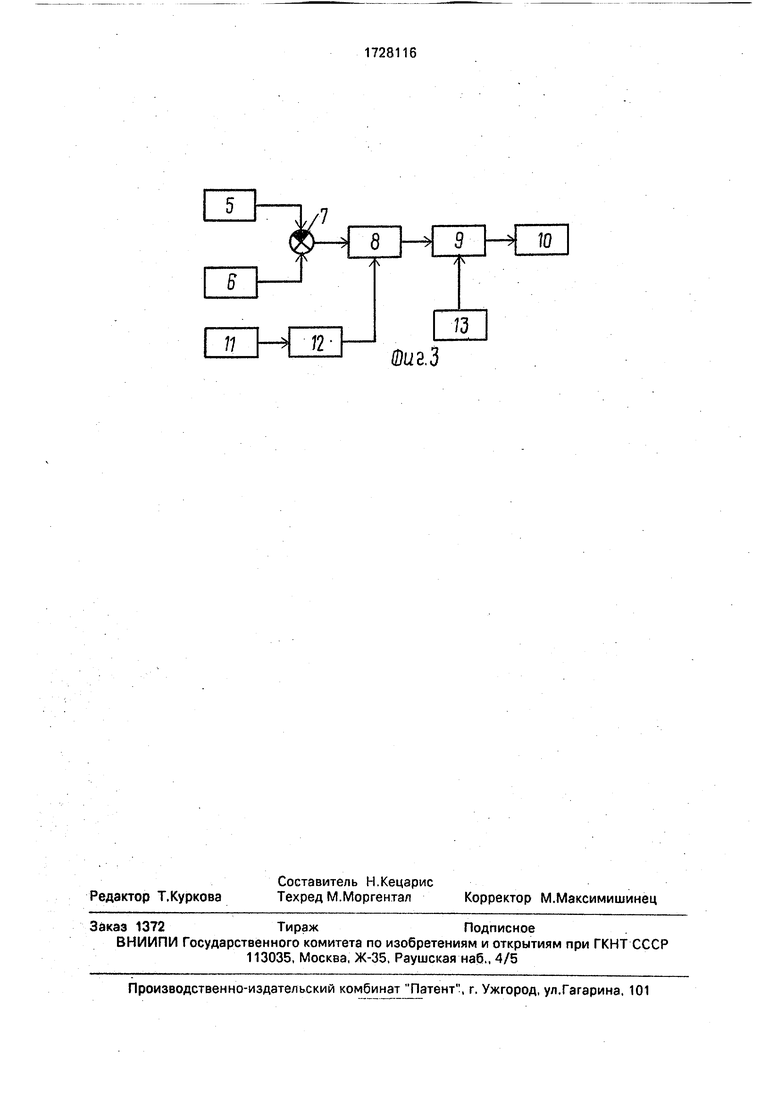
На фиг.1 представлена диаграмма действующих на устройство сил, вид сбоку; на фиг.2 - то же, план; на фиг.З - структурная схема устройства для управления краном- трубоукладчиком.
На фиг.1 показан кран-трубоукладчик 1 со стрелой 2 в рабочем положении под углом а. Грузовой полиспаст отклонен от оси стрелы 2 на угол /. Составляющие 3 и 4 стрелы 2 расположены под углом 2 вдруг к другу (фиг.2). Анализ показывает, что
Рр P-sin () sin/3,
где Р - усилие в грузовом полиспасте. Таким образом, разворачивающее усилие Рр зависит как от угла /3 отклонения грузового полиспаста от оси стрелы 2 в плоскости разворота трубоукладчика 1, так и от усилия в полиспасте Р, угла у отклонения грузового полиспаста в поперечной плоскости трубоукладчика 1 и угла а наклона стрелы 2. Все эти параметры являются величинами переменными, носящими случайный характер. Разворачивающую силу Рр можно оценить, зная только усилия FI и PZ в составляющих 3 и 4 стрелы 2 и угол а наклона стрелы (фиг.2). Это утверждение следует из представленных ниже выражений:
. F( (F2-Fi).sincr,
F2p-Fip (F2-Fi ) Sln0 (F2- Fi)«sin#.sina.
Рр F2P- Fip (F2- Fi)-sln#.slna. Так как sin 8 const, то
PP(F2 - a
(1)
Для того, чтобы составляющая силы веса стрелы 2 на ее плоскость не влияла на измерения величин FI и F2, это измерение следует проводить в местах, расположенных как можно ближе к оголовку стрелы.
Устройство для управления движением крана-трубоукладчика 1 содержит (фиг.З) датчика 5 и 6 усилий FI и F2, подключенные к элементу 7 сравнения, и последовательно с ним соединенные умножитель 8, позиционный регулятор 9 и привод 10 хода троллейной подвески. Кроме того, устройство содержит последовательно соединенные датчик 11 угла наклона стрелы и синусный преобразователь 12, подключенные к другому входу умножителя 8, а также задатчик 13 разворачивающей силы, соединенный с установочным входом позиционного регулятора 9.
Устройство работает следующим образом.
Блоки 5-8, 11 и 12 реализуют зависимость (1). При этом измерение усилий FI и F2 в составляющих 3 и 4 стрелы 2 крана можно измерять с помощью тензодатчиков. С выхода умножителя 8 сигнал Up, пропорциональный разворачивающему усилию Рр, поступает на информационный вход позиционного регулятора 9. На регуляторе 9 происходит сравнение сигнала Up и сигнала UP33A, приходящего с задатчика 13 разворачивающего усилия и пропорционального заданному значению разворачивающего усилия РрзаА. В зависимости от сигнала их рассогласования Д U Up3aA - Up регулятор 9 вырабатывает сигнал, который подается на привод 10 хода троллейной подвески. Последняя занимает положение, при котором Рр Ррзадс учетом всех перечисленных переменных параметров разворачивающего усилия.
Использование предлагаемого изобретения на кранах-трубоукладчиках, работающих в составе ИУК, позволяет повысить точность стабилизации курсового движения, что дает возможность работать на более близком расстоянии от траншеи, следовательно, повысить эффективность использования, грузоподъемных средств трубоукладчика. Кроме того, использование изобретения облегчает работу машинистов по управлению краном-трубоукладчиком, что повышает производительность труда.
Формула изобретения Способ управления краном-трубоукладчиком с троллейной подвеской путем измерения информационного параметра,, сравнения его с заданным уровнем и изменения .положения подвески в зависимости
от сигнала рассогласования, о т.л и ч а ю - щ и и с я тем, что, с целью повышения точности управления, в качестве информационного параметра принимается разность продольных усилий двух составляющих стрелы в плоскости разворота крана.

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕГУЛИРОВАНИЯ КУРСОВОГО ДВИЖЕНИЯ ТРУБОУКЛАДЧИКА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2019496C1 |
| Устройство для управления приводами подъма груза и стрелы крана-трубоукладчика | 1990 |
|
SU1791345A1 |
| Троллейная подвеска для магистральных трубопроводов | 1983 |
|
SU1162729A1 |
| Способ управления движением трубоукладчиков в колонне | 1988 |
|
SU1703608A1 |
| Трубоукладчик | 1990 |
|
SU1766833A1 |
| СПОСОБ ЗАЩИТЫ СТРЕЛОВОГО ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2271332C2 |
| Кран-трубоукладчик | 2017 |
|
RU2676998C1 |
| СПОСОБ УПРАВЛЕНИЯ КРАНОМ-ТРУБОУКЛАДЧИКОМ | 2016 |
|
RU2629998C1 |
| СПОСОБ ЗАЩИТЫ ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2271985C2 |
| КРАН-ТРУБОУКЛАДЧИК | 2015 |
|
RU2601319C1 |
Изобретение относится к управлению курсовым движением крана-трубоукладчика, работающего з составе изоляционно-укладочной колонны. С целью повышения точности управления измеряют разность продольных усилий двух составляющих стрелы в плоскости разворота крана, сравнивают измеренное значение с заданным уровнем и изменяют положение подвески в зависимости от сигнала .рассогласования. 3 ил.
Фиг.1
| Троллейная подвеска для магистральных трубопроводов | 1983 |
|
SU1162729A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
