Изобретение относится к подъемно- транспортному машиностроению, а именно к укладочным колоннам-трубопроводов больших диаметров.
Цель изобретения - повышение безопасности движения.
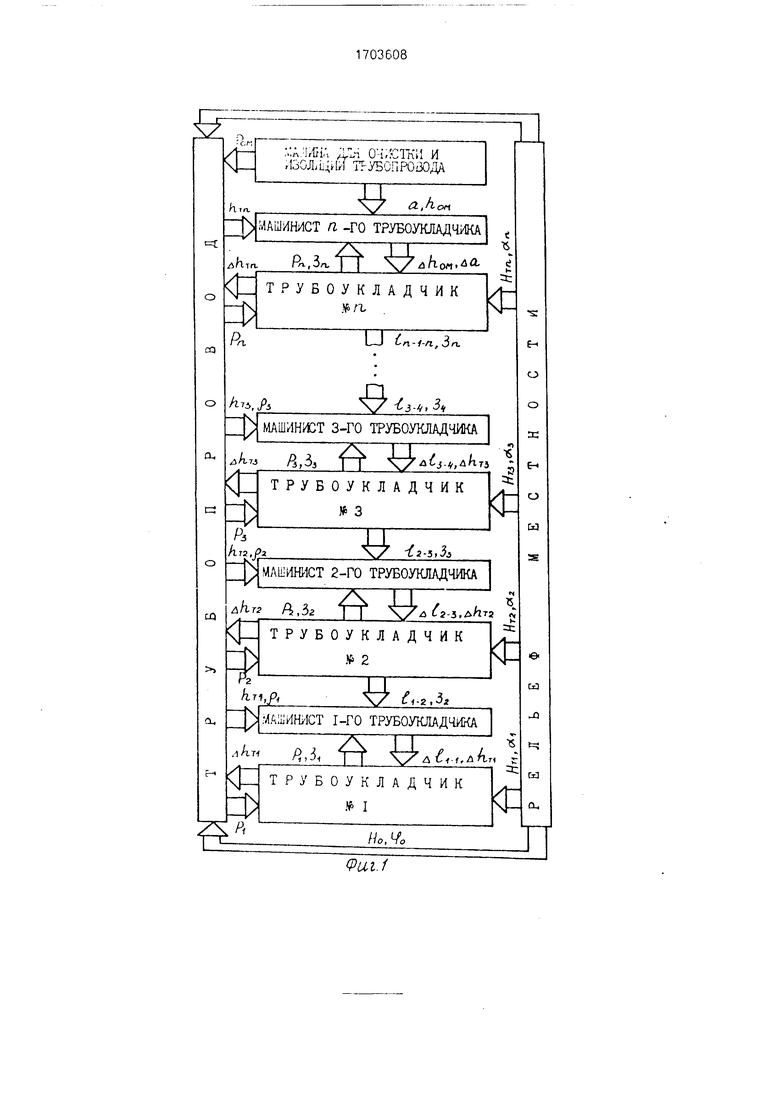
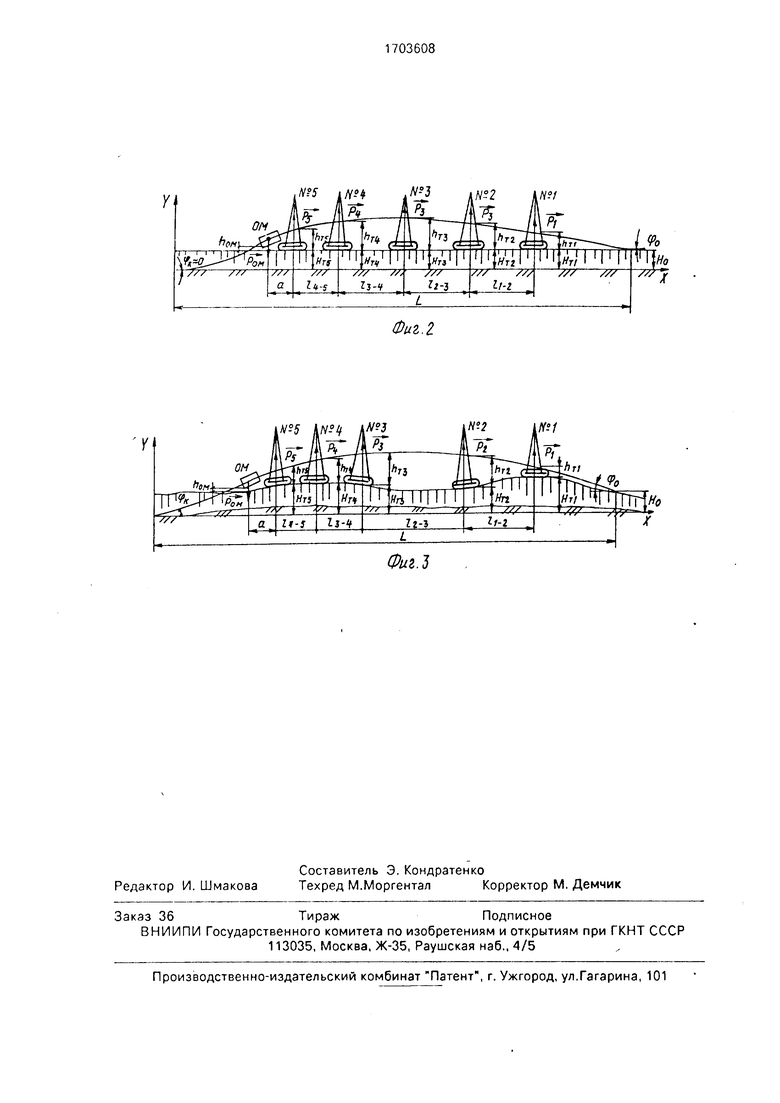
На фиг,1 схематически изображена обобщенная модель рабочего процесса изоляционно-укладочной колонны в составе п трубоукладчиков, общий вид; на фиг.2 - схема расстановки изоляционно-укладочной колонны из пяти трубоукладчиков при движении по ровной местности; на фиг.З - то же, при движении по пересеченной местности.
Примером конкретного применения способа управления может служить способ управления изоляционно-укладочной колонной трубоукладчиков, состоящей из пяти трубоукладчиков, оборудованных указателями фактической нагрузки на крюке и указателями грузового момента с выведенной внешней индикацией о недостаточной загрузке (менее 75%) и перегрузке (более 90%) в виде зеленого и красного фонарей соответственно, и машины для очистки и изоляции трубопровода ОМ 1423П, ведомой последним трубоукладчиком колонны. Способ управления в зтом случае заключается в непрерывном определении каждым машинистом высот подъема троллейных подвесок hii (фиг. 1 и 2). а последним по ходу колонны и высоты изоляционно-очистной машины Ьом, кривизны прогиба приподнятой части трубопровода р, нагрузки на крюке PI и степени загруженности по грузовому моменту своего трубоукладчика 3i, дистанции до идущей за трубоукладчиком машины II-I-M и степени загруженности идущего вслед за ним трубоукладчика 3i+i (по цвету горящего фонаря), а также в управлении грузовой и стреловой лебедками для изменения высот расположения троллейных подвесок A hTi с целью обеспечения необходимых технологических высот, исключения излома трубопровода, относительной равУ
Ё
VI
О
СО
о
§
номерности распределения общей нагрузки при сохранении каждым трубоукладчиком запаса грузовой устойчивости и в управлении ходовым оборудованием своего крана Д||-1+1, увеличивая дистанцию до идущего вслед за ним трубоукладчика в случае недостаточной загрузки по грузовому моменту последнего и уменьшая дистанцию в случае его перегрузки.
Такое управление колонной влияет на взаимное расположение трубоукладчиков в колонне следующим образом. При движении по равнинной местности (фиг.2) параметры приподнятой части трубопровода остаются практически неизменными. К этим параметрам, определяемым рельефом местности, относятся углы поворота крайних сечений приподнятой части трубопровода в точке отрыва трубопровода от земли и yv в точке касания трубопроводом дна траншеи, а также разность высотного положения этих точек Но и высота стоянки каждого трубоукладчика НТ|. Однако даже при движении по равнинной местности на грузоподъемность трубоукладчиков оказывает влияние микрорельеф трассы и несущая способность самого грунтового основания, что выражается в поперечном наклоне крана (А под нагрузкой с соответственным снижением момента устойчивости крана. Кроме того, при движении колонны часто возникает необходимость объезда обрушенных участков траншеи, увеличивая при этом вылет стрелы и, как следствие, величину воспринимаемого грузового момента. При этом, благодаря способу управления, дистанция между сильно загруженными трубоукладчиками уменьшается, а слабо загруженными - увеличивается. Причем интервалы между трубоукладчиками в колонне при движении по равнинной местности близки к рекомендуемым расчетно-опти- мальным интервалам.
При движении колонны по пересеченной местности (фиг.З) практически все параметры приподнятой части трубопровода непрерывно изменяются, что приводит к необходимости непрерывного изменения не
только высот подвесок hTi, но и дистанций между трубоукладчиками.
Таким образом, независимо от вида преодолеваемой неровности рельефа интервалы между трубоукладчиками изменяются таким образом, что каждый из трубоукладчиков загружен в среднем на 80- 85% по грузовому моменту, чем обеспечиваются относительная равномерность распределения общей нагрузки по всей длине трубопровода и, как следствие, минимальные напряжения в укладываемой части трубопровода.
Формула изобретения Способ управления движением трубоукладчиков в колонне, заключающийся в не- прерывном определении на каждом трубоукладчике его загруженности по грузовому моменту и изменении скорости трубо- укладчиков для поддержания дистанции между ними, отличающийся тем, что, с целью повышения безопасности движения, непрерывно сравнивают загруженность по грузовому моменту каждого трубоукладчика с заданной загруженностью по грузовому моменту и при наличии рассогласования кратковременно изменяют скорость движения впереди идущего трубоукладчика.
о
си
У.А. Ш- ДЛл ОЧ- CTKil И ИЗОЛ, ТРУБОПРОВОДА
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления краном-трубоукладчиком с троллейной подвеской | 1989 |
|
SU1728116A1 |
| Устройство для управления приводами подъма груза и стрелы крана-трубоукладчика | 1990 |
|
SU1791345A1 |
| Троллейная подвеска для магистральных трубопроводов | 1983 |
|
SU1162729A1 |
| Устройство для автоматического управления грузовой лебедкой трубоукладчика | 1988 |
|
SU1652289A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ КУРСОВОГО ДВИЖЕНИЯ ТРУБОУКЛАДЧИКА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2019496C1 |
| САМОХОДНАЯ СИСТЕМА ДЛЯ РЕМОНТА ПОДЗЕМНОГО ТРУБОПРОВОДА | 2000 |
|
RU2198336C2 |
| Трубоукладчик | 1990 |
|
SU1766833A1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ РАССТОЯНИЯ МЕЖДУ ТРУБОУКЛАДЧИКАМИ | 1990 |
|
RU2018901C1 |
| Способ удержания трубопровода при его механизированной очистке от изоляции на бровке траншеи | 2022 |
|
RU2803684C1 |
| ОГРАНИЧИТЕЛЬ НАГРУЗКИ НА СТРЕЛУ ТРУБОУКЛАДЧИКА | 1965 |
|
SU177056A1 |
Изобретение относится к подъемно- транспортному машиностроению, а именно к укладочным колоннам трубопроводов больших диаметров. Цель изобретения - повышение безопасности движения. При движении колонны трубоукладчиков на каждом трубоукладчике определяют его загруженность по грузовому моменту, а затем ее сравнивают с заданной загруженностью и при рассогласовании кратковременно изменяют скорость движения впереди идущего трубоукладчика. 3 ил.
17ft
л
МАШИНИСТ Л -ГО ТРУБОУКЛАДЧИКА
Рлх,Зп.ТТ / /гои да- g --- -------
Ф
ТРУБОУКЛАДЧИК
$п
CQ
Рг
/г
Ьъ,&
МАШИНИСТ 3-ГО ТРУБОУКЛАДЧИКА
-,
/J,33 ГТ ,тз
л
/
н
/
ТРУБОУКЛАДЧИК № 3
Р kjz,j
/
Х7 -Сз-5,Ъ
МАШИНИСТ 2-ГО ТРУБОУКЛАДЧИКА
Л/1
Г2
I 1 г-з. д
с
ТРУБОУКЛАДЧИК № 2
/in,j,
МАШИНИСТ 1-ГО ТРУБОУКЛАДЧИКА
/.3 Т| чТ дЛ- -дА.г с
5
ТРУБОУКЛАДЧИК
№ I
е
Л
7 я,Л
CV1
I-I п-1-п,Зп.
Ч.у Ј3-4, $ч
О ТРУБОУКЛАДЧИК
,
КЛАДЧИК 3
Х7 -Сз-5,Ъ
г-з. д
КЛАДЧИК 2
7 Л-2.зг
с
н
ТРУБОУКЛАДЧИКА
| чТ дЛ- -дА.г с
5
КЛАДЧИК
I
е ы
J3 fc
ьа о
/У0. У0
Фиг.1
о
Фиг.2.
ГТГ/Ь
Фиг.З
| Микаеев В.И.Машины для строительства магистральных трубопроводов | |||
| - М.: Недра, 1985 | |||
| с.ЗЗО. |
