Изобретение относится к строительству магистральных трубопроводов и предназначено для поддержания трубопровода на весу в процессе- очи стки, изоляции и укладки его в тран шею. Известна троллейная подвеска для магистральных трубопроводов, содерж щая навешиваемую на трубоукладчик проу1пину, шарнирно соединенные с не балансирные рычаги, к которым шарнирно прикреплены шарнирно сочленен ные между собой звенья с катками, соединенными между собой балансирными обоймами 03. . Недостаток .известной подвески, снабженной обычными (неприводньми) .катками, заключается в увеличений реактивного развора чивающего момента, действующего на кран-трубоуклад чик и возникаюш;его при трении катков о трубопровод, .-а также от усилий, возникающих при преодолении катками препятствий, например кольцевых пшов и пр. Но даже наличие одних только приводных катков полностью не решает проблемы йнижения нагрузок на кран-трубоукладчик, поскольку режим движени-я самоходной троллейной тележки не всегда может оказаться синхронным режиму движения трубоукладчика. А это ведет к продергиванию подвески по трубопроводу, нежелательному раскачиванию укладьшаемого трубопровода и пр., что снижает маневренность кр на-трубоукладчика и требует повьш1ен запаса устойчивости против его опро кидьгоания.. Цель изобретения - повьшение надеш ости. Поставленная цель достигается те что троллейная подвеска для магистральных трубопроводов, содержащая навешиваемую на трубоукладчик проуш ну, шарнирно соединенные с ней бала сирные рычаги, к которым шарнирно прикреплены шарнирно сочлененные между собой звенья с катками, соеди ненными между собой балансирными обоймами, снабжена установленным на одной из балансирных обойм электродвигателем, вал которого соединен с одним из катков, и датчиком углового положения проушины, связанным посредством командоаппарата реверси ного действия с целью управления электродвигателем. ria фиг.1 изображена троллейная подвеска, удерживающая на весу трубопровод, вид сбоку; на фиг.2 - положение троллейной подвески, режим движения которой согласуется с режимом движения крана-трубоукладчика; на фиг.3 - рабочее состояние троллейной подвески при рассогласовании режима ее движения с режимом хода трубоукладчика; на фиг.4 - схема синхронизатора хода троллейной подвески; на фиг.5 - одно из состояний датчика углового положения проушины, соответствующее положению троллейной подвески на фиг.З. Троллейная подвеска для магистральных трубопроводов содержит проушину I, посредством шарниров 2 связанную с балансирными рычагами 3, концы которых шарнирно связаны с гибкими звеньями 4, состоящими из шарнирно соединенньк элементов 5, на которых установлены опорные катки 6, хотя бы один из которых, например каток 7, выполнен ведущим с приводом от электродвигателя 8, установленным на балансирной обойме 9. На проушине 1 установлен синхронизатор 10 (фиг.4 скоростей перемещения крана-трубоукладчика П и троллейной подвески, поддерж..1вающей на весу трубопровод 12 при помощи троса 13 стрелы трубоукладчика. Синхронизатор 11 содержит датчик 14 углового положения проушины 1, соединенный через исполнительный командоаппарат 15 с электродвигателем 8 приводного катка 7. Датчик состоит из изогнутой по дуге окружности стеклянной трубки 16с вмонтированным внутри нее, навитым по спирали, проволочным резистором 17, концы которого вьшедены наружу трубки 16 через торцовые заглущки. Внутри трубки 16 имеется металлический дугообразный неподвижный контакт 18. Электрическая связь между контактом 18 и.резистором 17осуществляется через подвижный контакт 19, представляющий собой свободно перемещающийся ртутный шарик. В исходном положении электрическое сопротивление резистора 17 разделяется за счет положения контакта 18на две части, каждая из которых составляет величину Гд. Боковые и центральные вьшоды (провода) присоединены к электрическому мосту Уинстона, в котором имеется два дополнительных резистора - регулир емый 20 (для настройки моста) и балластный 21. В схеме предусмотре на возможность выключения из работ путем заворачивания левой или правой половины резистора 17 с помощью выключателей 22 и 23 соответственно. Цепь управления запитьшается источником 24 постоянного тока, включаемого выключателем 25. В одну из диагоналей моста вклю датчик 26 рассогласования, с котор го подается механический или злект рический сигнал на исполнительный командоаппарат 15 реверсивного дей ствия, находящийся в цепи системы силового электропитания двигателя опорного катка 7. Силовое питание осуществляется за счет источника 27постоянного тока, включаемого рубильником 28. Устройство работает следующим o6pa3Oid. В положении, когда кран-трубоукладчик 11 находится в покое, а датчик 14 в горизонтальном положении (трос 13 в вертикальном положении), выключатель 25 и рубильник 28должны быть замкнуты, а выключа тели 22 и 23 разомкнуты. При трога нии крана-трубоукладчика I1 с мест в начальный момент происходит незначительное отставание троллейной подвески из-за трения качения катков 6 о поверхность трубопровода 12. Это отставание приводит к изменению угла наклона троса 13 и перекосу датчика 14 синхронизатора 10. При этом наклоняется трубка 16 датчика I4 и смещается подвижный контакт 19 (на фиг.5). Нарушается исходная балластировка моста Уинстона Через диагональ моста, в которую включен датчик 26 рассогласования, начинает протекат ток, на что реагирует датчик 26 и дает сигнал на исполнительный командоаппарат 15. Он, в свою очередь, обеспечивает прохождение тока в нужном направлении через дв гатель 8. Таким образом, троллейная подвеска начинает двигаться вслед за краном-трубоукладчиком 1 Заложенный принцип позволяет осуществлять постоянную полную синхрони зацию движений крана-трубоукладчика 11 и троллейной подвески. При 29 остановке трубоукладчика 11 троллейная подвеска продолжает еще двигаться, пока трос 13 не займет вертикального положения. Когда необходимость в син хронности работы отпадает,например при маневрировании крана-трубоукладчика, вся электрическая система может быть отключена выключателем 25 и рубильником 28. Кроме того, в случае необходимости можно с помощью выключателей 22 и 23 ввести принудительную корректировку в работу автоматической системы синхронизации. При этом управление осуществляется из кабины машиниста крана-трубоукладчика. Такая необходимость возникает, если крантрубоукладчик стал терять маневренность хода, т.е. когда затруднено осуществление поворотов. В этом случае машинист может воспользоваться выключателями и создать принудительное опережение или отставание троллейной подвески по отношению к трубоукладчику, что создаст дополнительный разворачивающий момент в системе подвески трубоукладчика.После завершения маневра снова нужно перейти на автоматический режим работы системы синхронизации хода троллейной подвески. Троллейная подвеска с приводными катками, снабженная синхронизатором 10 скоростей перемещения, позволяет сократить количество кранов-трубоукладчиков в колонне до пяти вместо семи, предусмотренных типовой схемой, за счет уменьшения коэффициента запаса грузовой устойчивости К против опрокидьшания от 1,4 до 1,1, при этом маневренность обеспечивается . . активностью троллейной подвески. При прежнем количестве кранов-трубоуклад- чиков колонна, оснащенная предлагаемыми троллейными подвесками, способна обеспечить поточно-скоростное строительство трубопроводов на 85% протяженности участков трасс (при существующих троллейных подвесках 70%) за счет лучшей вписьшаемости . колонны на участках с пересеченным рельефом местности, что способствует уменьшению возникновения захлестов. Вписьшаемость может быть увеличена в 2-2,5 раза, что приводит к удлинению рабочего участка от 1,5 до 4,5 км.
Фиг. 2
///////// // /// /7/ ///
Угол переноса Фиг.З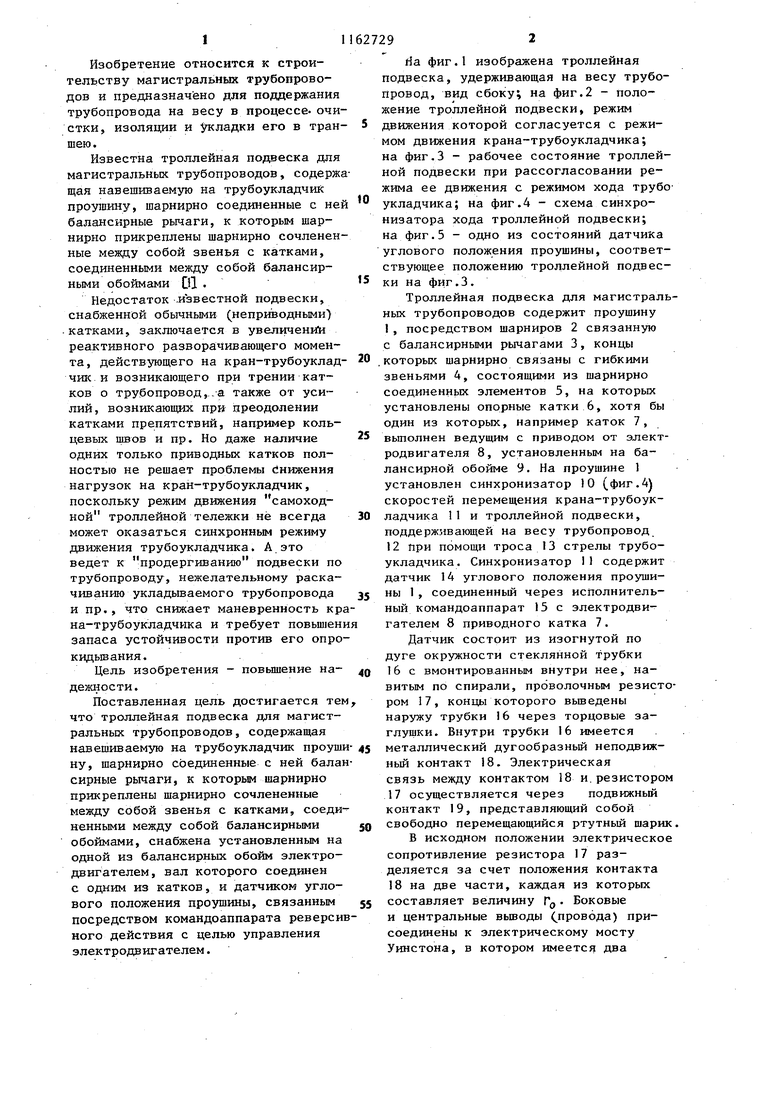
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ удержания трубопровода при его механизированной очистке от изоляции на бровке траншеи | 2022 |
|
RU2803684C1 |
| УСТРОЙСТВО-ОПОРА ДЛЯ ПОДДЕРЖАНИЯ ТРУБОПРОВОДА | 1994 |
|
RU2079761C1 |
| Захватное устройство для трубопроводов | 1983 |
|
SU1144964A1 |
| Машина для очистки и изоляции наружной поверхности трубопроводов | 1988 |
|
SU1534243A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ КУРСОВОГО ДВИЖЕНИЯ ТРУБОУКЛАДЧИКА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2019496C1 |
| СПОСОБ ДЕМОНТАЖА МАГИСТРАЛЬНОГО ТРУБОПРОВОДА | 2014 |
|
RU2565118C2 |
| СПОСОБ ПОДДЕРЖКИ ПОДЗЕМНОГО ТРУБОПРОВОДА ВО ВРЕМЯ ЕГО КАПИТАЛЬНОГО РЕМОНТА | 2000 |
|
RU2235242C2 |
| Трубоукладчик | 1990 |
|
SU1766833A1 |
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА И ОПУСКАНИЯ ШАНДОРОВ В ОТВЕРСТИЯ ГИДРОТЕХНИЧЕСКИХ СООРУЖЕНИЙ | 1934 |
|
SU46192A1 |
| Сварочный комплекс | 1979 |
|
SU904244A1 |


. ТРОЛЛЕЙНАЯ ПОДВЕСКА ДЛЯ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ, содержащая навешиваемую на трубоукладчик проушину, шарнирно соединенные с ней балансирные рычаги, к которым шарнирно прикреплены шарнирно сочлененные между собой звенья с катками, соединенньми между собой балансирньми обоймами, отличающаяся тем, что, с целью повьшения надежности,она снабжена установленным на одной из балансирных o6oij электродвигателем, вал которого соединен с одним из катков, и датчиком углового положения проушины, свяэанньм посредством командоаппарата реверсивного действия с цепью управления электродвигателем.
| Устройство для поддержания трубопровода на весу | 1975 |
|
SU557037A2 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
