Изобретение относится к электротехнике и может быть использовано в электроприводе постоянного тока с двигателями последовательного возбуждения.
Целью изобретения является повыше- ние КПД за счет уменьшения пульсаций тока якоря.
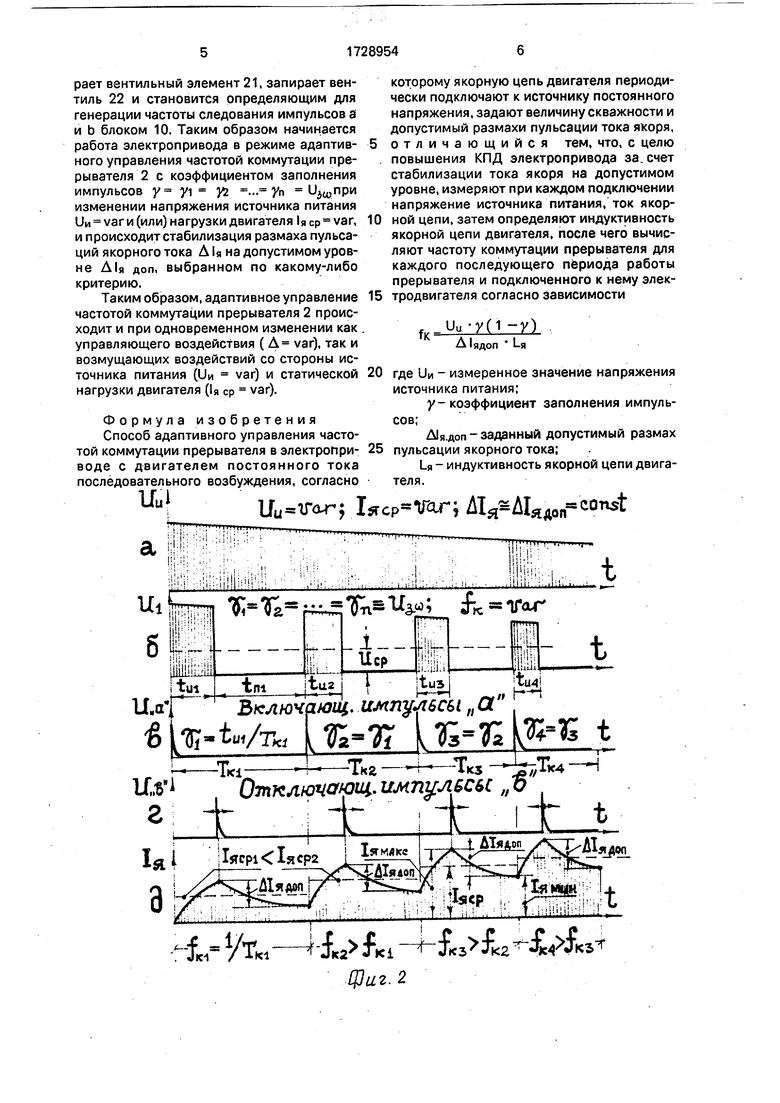
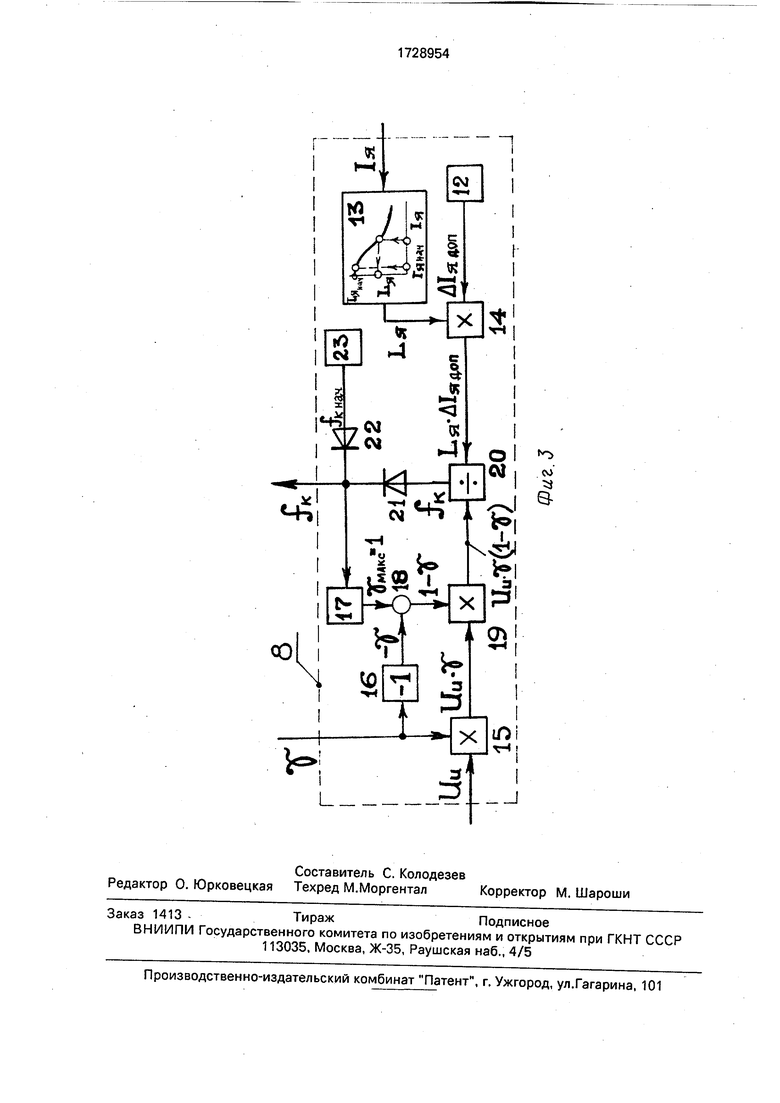
На фиг.1 приведена функциональная схема электропривода; на фиг.2 - временные диаграммы изменения сигналов в элек- троприводе; на фиг.З - структурная схема вычислительного устройства.
Электропривод состоит из двигателя 1 последовательного возбуждения, подключенного через прерыватель 2 к источнику 3 постоянного напряжения, вентиля 4, включенного параллельно якорной цепи двигателя 1 последовательного возбуждения и встречно относительно источника питания, системы 5 управления прерывателем, состоящей из дат- чика 6 тока якоря, подключенного к первым входам блока 7 формирования сигнала им- пульсности и блока 8 адаптации частоты коммутации, датчика 9 напряжения источника питания, выходом подключенного к второму входу блока 8, и блока 10 фазосме- щения и формирования управляющих импульсов, соединенного с выходами блоков 7 и 8, два выхода блока 10 соединены с соответствующими входами прерывателя 2. Блок 8 состоит из блока 11 вычислительного устройства и блок 12 задания уровня допустимого размаха пульсаций тока якоря, выход которого соединен с первым входом блока 11, второй вход которого соединен с первым входом блока 8, второй вход которого соединен с третьим входом блока 11, четвертый вход которого соединен выходом блока 7, выход блока 8, являющийся выходом блока 1-1, соединен с вторым входом блока 7.
Вычислительное устройство (блок 8) состоит из блока 12 задания, блока 13 нелинейного преобразователя, вход которого является вторым входом блока 11, блок 14 умножения, блока 15 умножения, первый вход которого является третьим входом блока 8, четвертый вход которого одновременно является вторым входом блока 15 умножения и входом инвертора 16, выходы блоков 17 и 16 соединены с входами сумматора 18, выход которого соединен с первым входом блока 19 умножения, второй вход которого соединен с выходом блока 15, выход блока 19 соединен с первым входом блока 20 деления, второй вход которого соединен с выходом блока 14 умножения, выход блока 20 соединен с анодом вентильного элемента 21, катод которого одновременно соединен с катодом вентильного
элемента 22 и входом блока 17, анод вентильного элемента 22 соединен с выходом блока 23 начальной частоты коммутации.
На вход электропривода подают сигнал задания U3o,i который поступает на блок 7, где формируется сигнал у, определяющий коэффициент заполнения импульсов. Этот сигнал поступает в блок 10 и одновременно в блок 11. С выхода блока 11 сигнал поступает на второй вход блока 10 в первый момент времени, соответствующий начальной частоте коммутации. В блоке 10 формируются включающие импульсы а и отключающие импульсы Ь, обеспечивая управление прерывателем 2 с заданной yi и начальной частотой коммутации fKi.
Во время проводящего состояния прерывателя 2 с датчика 6 снимается сигнал, пропорциональный току якоря 1я, и поступает в блок 13 нелинейного преобразователя для вычисления сигнала, пропорционального индуктивности якорной цепи я.
Для последовательного возбуждения суммарная индуктивность якорной цепи вычисляется по формуле
d Ф
1-я 2 р От Юпов Кв . ,
О 1я
где Огп 1,2 - коэффициент рассеяния обмотки главных полюсов;
- число витков обмотки возбуждения, приходящихся на один полюс;
Кв - коэффициент, учитывающий действие вихревых токов.
Одновременно сигнал с блока 6 поступает на вход блока 7 для снижения величины
У И ВЫПОЛНенИИ УСЛОВИЯ я я макс.доп.
В результате поступления всех входных сигналов в блок 11 начинается расчет fK частоты коммутацими прерывателя 2 для следующего периода работы. Сигнал с выхода блока 12 и сигнал, пропорциональный величине с выхода блока 13, подаются на входы блока 14умножения. Сигналы ус выхода блока 7 и ии с датчика 9 напряжения поступают на входы блока 15 умножения. В блоке 16 знак сигнала у изменяется на обратный. Блок 17 формирует сигнал, соответствующий максимальной скважности Умакс 1, и подает его на первый вход сумматора 18, на второй вход которого поступает сигнал с выхода инвертора 16, сигналы с выхода блока 15 и с выхода сумматора 18 поступают соответственно на первый и второй входы блока 19 умножения. Далее сигнал с выхода блока 19 поступает на первый вход блока 20 деления, а сигнал с выхода блока 14 - на второй вход блока 20. В случае, когда сигнал тк с выхода блока 20 деления станет больше сигнала f нач fKi, он отпирает вентильный элемент 21, запирает вентиль 22 и становится определяющим для генерации частоты следования импульсов а и b блоком 10. Таким образом начинается работа электропривода в режиме адаптивного управления частотой коммутации прерывателя 2 с коэффициентом заполнения импульсов у yi уг ... уп игшпри изменении напряжения источника питания ии var и (или) нагрузки двигателя 1Я ср var, и происходит стабилизация размаха пульсаций якорного тока А 1я на допустимом уров- не Д1я доп, выбранном по какому-либо критерию.
Таким образом, адаптивное управление частотой коммутации прерывателя 2 происходит и при одновременном изменении как . управляющего воздействия (Д var), так и возмущающих воздействий со стороны источника питания (Uи - var) и статической нагрузки двигателя (1Я ср var).
Формула изобретения Способ адаптивного управления частотой коммутации прерывателя в электроприводе с двигателем постоянного тока последовательного возбуждения, согласно
10
15
которому якорную цепь двигателя пе чески подключают к источнику посто напряжения, задают величину скважн допустимый размахи пульсации тока отличающийся тем, что, с повышения КПД электропривода з стабилизации тока якоря на допус уровне, измеряют при каждом подклю напряжение источника питания, ток ной цепи, затем определяют индукти якорной цепи двигателя, после чего ляют частоту коммутации прерывате каждого последующего периода р прерывателя и подключенного к нем тродвигателя согласно зависимости
fK
Uu-yQ-y)
Al
ядоп
20 где Уи - измеренное значение напря источника питания;
у-коэффициент заполнения и сов;
.доп - заданный допустимый р 25 пульсации якорного тока;
- индуктивность якорной цепи теля.
Uuilfu«ir W 5 Lrcp«WU4 ДТя АГяАоп5 0
0
5
которому якорную цепь двигателя периодически подключают к источнику постоянного напряжения, задают величину скважности и допустимый размахи пульсации тока якоря, отличающийся тем, что, с целю повышения КПД электропривода за. счет стабилизации тока якоря на допустимом уровне, измеряют при каждом подключении напряжение источника питания, ток якорной цепи, затем определяют индуктивность якорной цепи двигателя, после чего вычисляют частоту коммутации прерывателя для каждого последующего периода работы прерывателя и подключенного к нему электродвигателя согласно зависимости
fK
Uu-yQ-y)
Al
ядоп
где Уи - измеренное значение напряжения источника питания;
у-коэффициент заполнения импульсов;
.доп - заданный допустимый размах пульсации якорного тока;
- индуктивность якорной цепи двигателя.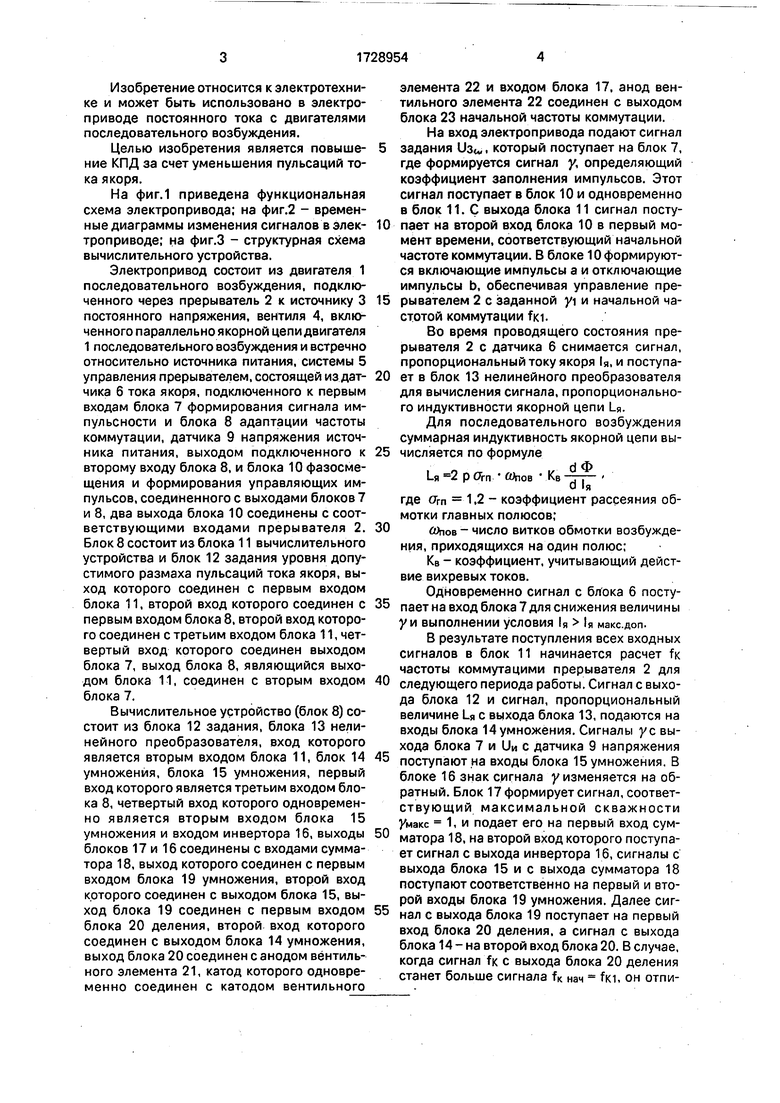
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления тяговым электродвигателем транспортного средства | 1990 |
|
SU1761561A1 |
| ТЯГОВЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА С ТИРИСТОРНЫМ УПРАВЛЕНИЕМ | 2001 |
|
RU2208530C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТЯГОВЫМ ЭЛЕКТРОДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА И БЛОК ФОРМИРОВАНИЯ ЗАДАННЫХ ЗНАЧЕНИЙ ТОКОВ ЯКОРЯ И ВОЗБУЖДЕНИЯ | 2003 |
|
RU2248893C2 |
| Способ управления электроприводом постоянного тока механизма с пульсирующей нагрузккой на валу и устройство для его реализации | 1979 |
|
SU855909A1 |
| Электропривод постоянного тока | 1977 |
|
SU692044A1 |
| Способ защиты обмотки якоря электродвигателя от перегрева и устройство для его осуществления | 1984 |
|
SU1279010A1 |
| ТЯГОВЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА С УПРАВЛЕНИЕМ НА ПОЛУПРОВОДНИКОВЫХ УСТРОЙСТВАХ | 2007 |
|
RU2334629C1 |
| Электропривод | 1990 |
|
SU1758820A1 |
| Многодвигательный электропривод | 1990 |
|
SU1812610A1 |
| ТЯГОВЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА С ТИРИСТОРНЫМ УПРАВЛЕНИЕМ | 2004 |
|
RU2260520C1 |
Изобретение относится к электротехнике. Целью изобретения является повышение КПД электропривода за счет стабилизации тока якоря на допустимом уровне. Электропривод содержит двигатель 1 последовательного возбуждения, подключенный через прерыватель 2 к источнику постоянного напряжения 3, вентиль 4, включенный параллельно якорной цепи двигателя последовательного возбуждения. Изобретение обеспечивает уменьшение пульсации тока якорной цепи, а следовательно, и частоты вращения двигателя регулированием частоты коммутации прерывателя 2. 3 ил.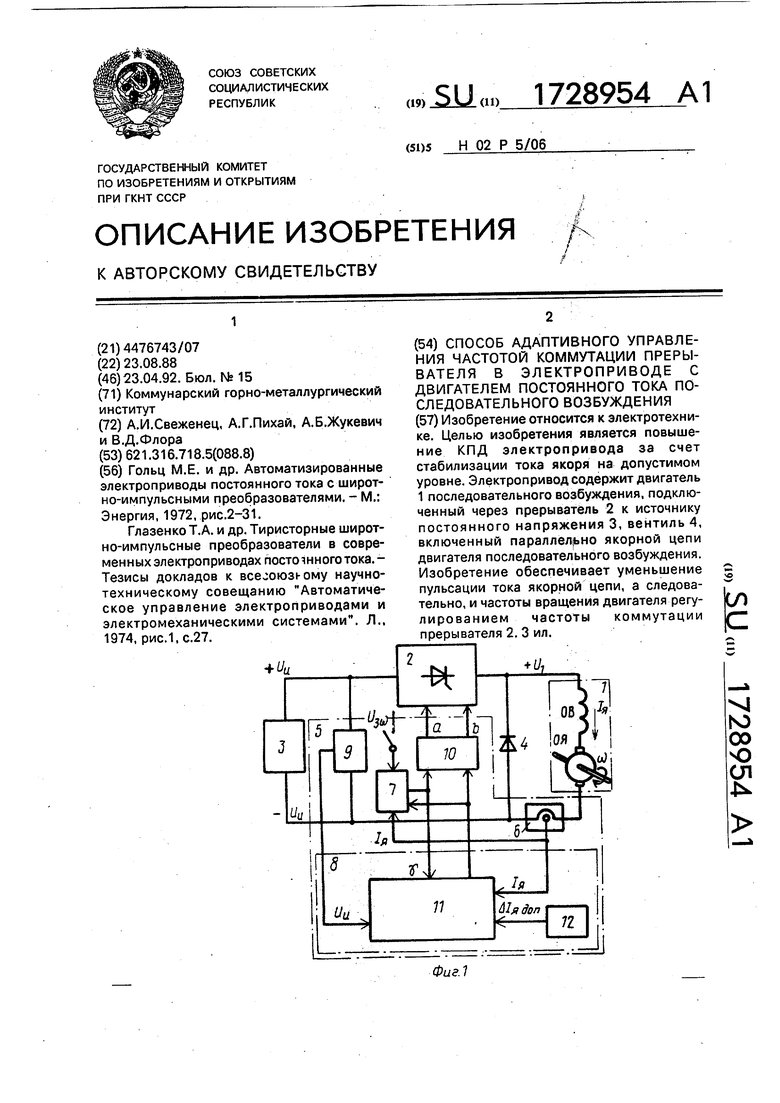
yJj/i--i-- :-:-L - :-..i -Tr I .j - - - -- . - r -у-------- .ни. -t: -- j-;lj ---- + - -;Uliil , Асж1г мL i
Ucp
Si.,. ---M-i - r-i U-aV Включают, импшвсы „а
6
€
LMi; liliil;.
Liiiiil
№
ши - t
..ii irUcft : :liji hU
1ШШШpu-.| J±ЈE-liijiiiujIflbiil Itut л tni , |tu2 |tu5|jtujj
Г Включаюц. импшбсы „а
Wifa l%-Ek%-C t
--Tici 4asTic4 -H
e - HCir T- . «//
Отключают, импулвсы „ о
LMi; liliil;.
Liiiiil
№
ши - t
: :liji hU
liijiiiujIflbiil
| Гольц М.Е | |||
| и др | |||
| Автоматизированные электроприводы постоянного тока с широт- но-импульсными преобразователями | |||
| - М.: Энергия, 1972, рис.2-31 | |||
| Глазенко Т.Д | |||
| и др | |||
| Тиристорные широт- но-импульсные преобразователи в современных электроприводах постоянного тока | |||
| - Тезисы докладов к всесоюзному научно- техническому совещанию Автоматическое управление электроприводами и электромеханическими системами | |||
| Л., 1974, рис.1, с.27 | |||
| +ии |
