Изобретение относится к измерительной технике и может быть использовано в координатно-измерительных машинах, на станках с ЧПУ и многоцелевых станках в условиях ГПС.
Известна измерительная головка, содержащая корпус, пространственно-подвижный рычаг, размещенный внутри корпуса с измерительным наконечником и опорным фланцем, контактные элементы, расположенные на опорном фланце и в корпусе по соосным окружностям, сигнализатор размыкания контактных элементов, компенсатор систематической погрешности, выполненный в виде соосной с измерительным рычагом спиральной пружины, диаметр которой равен диаметру измерительного рычага в верхней его части, и нагрузочную пружину, для регулирования силы которой служит винт.
Недостатками данной измерительной головки являются погрешность определения момента касания наконечником поверхности измеряемой детали из-за наличия переходных процессов при размыкании контактных элементов, искажающих выходной сигнал и затрудняющих его обработку и передачу в систему управления машиной или станком для считывания показаний с измерительных систем машины или станка; отсутствие фиксации подвижного рычага с измерительным наконечником при ощупывании поверхности измеряемых деталей в направлении, перпендикулярном направлению перемещения измерительной головки, что увеличивает погрешность измерения при ощупывании наклонных и криволинейных поверхностей.
Наиболее близкой к предлагаемой является измерительная головка, содержащая корпус, три размещенных в нем друг над другом пружинных параллелограмма с диапазоном перемещений 3 мм по трем осям X, Y и Z, прецизионные механические фиксаторы, измерительный щуп и три индуктивные линейные измерительные системы для определения положения измерительного щупа.
Определение положения измерительной головки при касании измерительного наконечника поверхности детали производится при достижении нулевого состояния линейной системы головки, обеспечиваемого перемещением суппорта машины по направлению измерения.
Недостаток известной измерительной
головки заключается в сложности конструкции из-за наличия трех измерительных систем для оси измерений.
Целью изобретения является упрощение конструкции.
N Указанная цель достигается тем, что в измерительной головке, содержащей корпус, подпружиненный по оси с возможностью перемещения измерительный
наконечник, датчик линейных перемещений и фиксаторы измерительного наконечника, конец измерительного наконечника, предназначенный для взаимодействия с датчиком, выполнен полусферическим, а
фиксаторы измерительного наконечника выполнены в виде четырех подпружиненных стержней, установленных с возможностью перемещения относительно корпуса сухарей в перпендикулярной оси наконечника плоскости. Сухари расположены попарно в двух взаимно перпендикулярных направлениях вокруг измерительного наконечника.
Предлагаемая измерительная головка
отличается выполнением конца измерительного наконечника, предназначенного для взаимодействия с датчиком, полусферическим, а фиксаторов измерительного наконечника - в виде установленных с возможностью перемещения в перпендикулярной оси наконечника плоскости четырех подпружиненных стержней относительно корпуса сухарей, попарно расположенных в двух взаимно перпендикулярных
направлениях вокруг измерительного наконечника.
На фиг. 1 изображена измерительная головка, вид спереди; на фиг. 2 - разрез А-А на фиг. 1.
Измерительная головка содержит корпус 1, соединенный с конусом для установки в шпиндель станка или переходник, для установки в пиноль координатно-измеритель- ной машины (КИМ), индуктивный датчик 2 с
наконечником 3, перемещающимся по оси Z, грибок 4, базирующийся на торце фланца
корпуса 1, полусферу 5, выполненную за одно целое с грибком, измерительный наконечник 6, закрепленный с обратной стороны грибка, коническую фиксирующую пружину 7, закрепленную с одной стороны на измерительном наконечнике 6, с другой - на втулке 8, размещенной в отверстии фланца корпуса 1, электромагниты 9 - 12 с прецизионными фиксаторами 13 и возвратными пружинами 14, сухари 15 - 18 с отверстиями под ввод фиксаторов 13, направляющие винты,закрепленные в сухари 15 - 18 с одной стороны и имеющие возможность перемещения по скользящей посадке в станке корпуса 1 с другой, и воз- вратные пружины 19. На наружной стенке корпуса закреплен электроразъем 20 для соединения через устройство управления и датчик 21 обратной связи с системой управления станком или КИМ.
До начала процесса измерения электромагниты 9-12 отключены, сухари 15-18 находятся в зафиксированном положении, т. е. прецизионные фиксаторы 13 находятся в отверстиях сухарей 15 - 18, обеспечивая тем самым центрирование грибка 4 в нулевом измерительном положении, наконечник 3 индуктивного датчика 2 находится в наивысшей точке полусферы 5.
Устройство работает следующим обра- зом.
С началом движения измерительной головки, например по оси X влево, из системы управления станком КИМ поступает сигнал на включение электромагнита 7 и фиксатор 13 выходит из отверстия сухаря 15, Сухари 16-18 находятся в зафиксированном состоянии. При соприкосновении измерительного наконечника 6 с поверхностью измеряемой детали грибок 4 с полусферой 5 остаются в статическом состоянии, а корпус 1 измерительной головки с индуктивным датчиком 2 продолжает движение. Сухари 16 и 18 являются направляющими при движении корпуса 1 относительно грибка 4 с полусферой 5. Сухарь 15 отжимается грибком 4 и также остается в статическом состоянии за счет движения головки направляющего винта по стенке корпуса 1. Фиксирующая коническая пружина 7 пре- пятствует возникновению перекосов грибка 4 с измерительным наконечником 6.
В результате перемещения наконечника 3 индуктивного датчика 2 относительно полусферы 5 индуктивный датчик 2 начина- ет вырабатывать электрический сигнал, который поступает через электроразъем 20 на устройство управления, где происходит сравнение напряжения сигнала индуктивного датчика 11Д с пороговым напряжением ип, величина которого заранее определена.
Движение измерительной головки прекращается при достижении разности сигнала УД и ип нуля: 11П - УД - . В этом положении происходит запоминание координат точки касания, после чего система управления станка или КИМ вырабатывает команду на начало движения измерительной головки в обратную сторону. При возврате измерительной головки в исходное положение возвратная пружина обеспечивает статическое состояние сухаря 15 и грибка 4 с полусферой 5. Далее в измерительную головку через электроразъем 20 поступают два сигнала: один включает электромагнит 9 и возвратная пружина 14 заставляет фиксатор 13 войти в отверстие и зафиксировать сухарь 15. Грибок 4 с полусферой 5 находится в нулевом измерительном положении. Второй.сигнал включает электромагнит 11 и происходит расфиксирование сухаря 17, Далее процесс происходит аналогично описанному.
Измерение по оси Y происходит по аналогии с измерением по оси X. Измерение по оси Z осуществляется при фиксированном положении всех сухарей за счет осевого перемещения грибка 4 с полусферой 5 и перемещения наконечника 3 индуктивного датчика 2.
Формула изобретения
Измерительная головка, содержащая корпус, закрепленные в корпусе подпружиненный по оси с возможностью перемещения измерительный наконечник и предназначенный для взаимодействия с одним концом измерительного наконечника датчик линейных перемещений и фиксаторы измерительного наконечника, отличающаяся тем, что, с целью упрощения конструкции, конец измерительного наконечника, предназначенный для взаимодействия с датчиком, выполнен полусферическим, а фиксаторы измерительного наконечника выполнены в виде установленных с возможностью перемещения в перпендикулярной оси наконечника плоскости четырех подпружиненных относительно корпуса сухарей, попарно расположенных в двух взаимно перпендикулярных направлениях вокруг измерительного наконечника.
А-А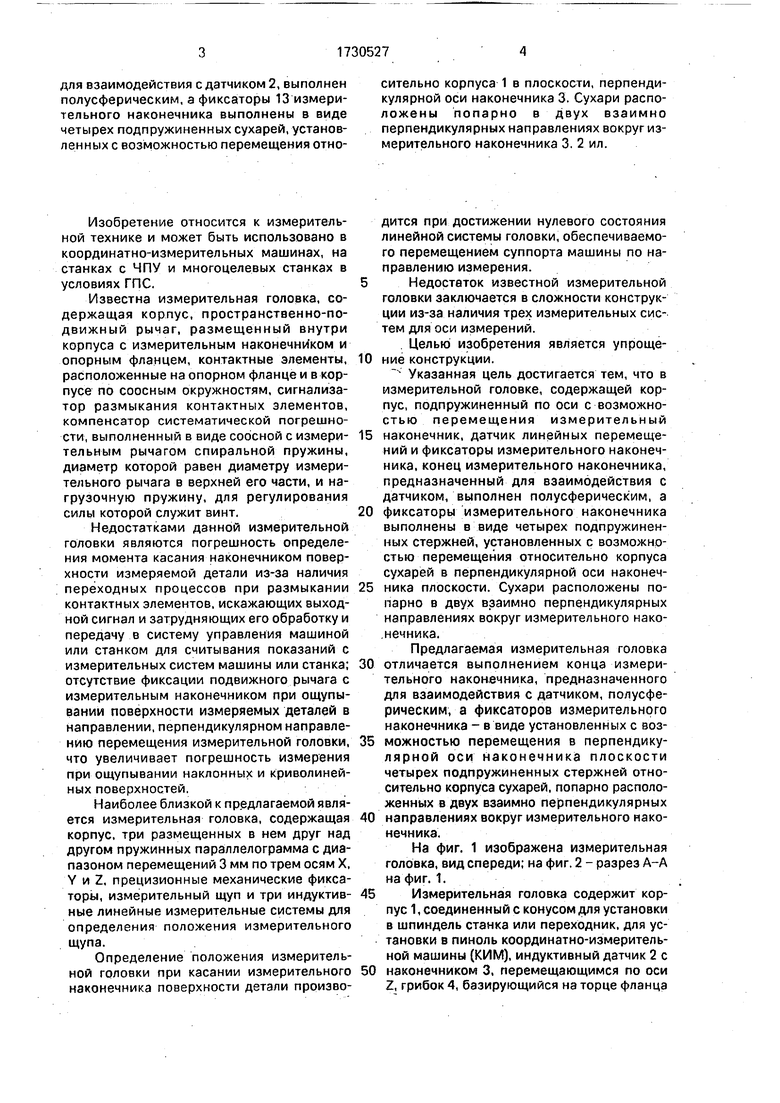
| название | год | авторы | номер документа |
|---|---|---|---|
| Нулевая измерительная головка | 1985 |
|
SU1744435A1 |
| Нулевая измерительная головка | 1985 |
|
SU1714331A1 |
| Измерительная головка | 1988 |
|
SU1601502A1 |
| Измерительная головка для координатных измерительных машин | 1984 |
|
SU1260659A1 |
| Координатная измерительная система для токарно-револьверного станка с ЧПУ | 1985 |
|
SU1303373A1 |
| СПОСОБ КОНТРОЛЯ ОПТИЧЕСКОГО ВЗАИМОДЕЙСТВИЯ С ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2188389C2 |
| Нулевая измерительная головка | 1990 |
|
SU1747859A1 |
| Измерительная головка | 1985 |
|
SU1272111A1 |
| Измерительная головка | 1978 |
|
SU819567A1 |
| Измерительная головка для координатных измерительных машин | 1986 |
|
SU1395935A2 |
Изобретение относится к измерительной технике и может быть использовано в координатно-измерительных машинах, на станках с ЧПУ и многоцелевых станках в условиях ГПС. Целью изобретения является упрощение конструкции. В измерительной головке, содержащей корпус 1, подпружиненный по оси с возможностью перемещения измерительный наконечник 3, датчик 2 линейных перемещений и фиксаторы 13 измерительного наконечника 3 конец измерительного наконечника, предназначенный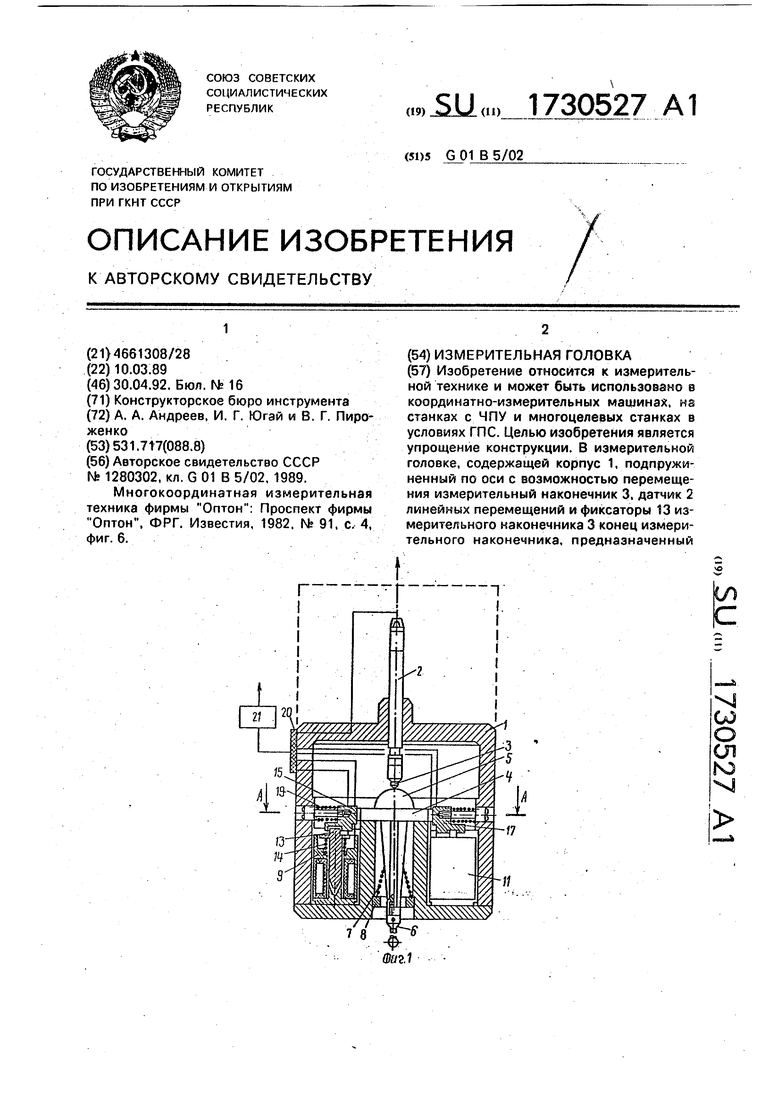
fg
| Измерительная головка | 1984 |
|
SU1280302A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Многокоординатная измерительная техника фирмы Оптон : Проспект фирмы Оптон, ФРГ | |||
| Известия, 1982 | |||
| Огнетушитель | 0 |
|
SU91A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
