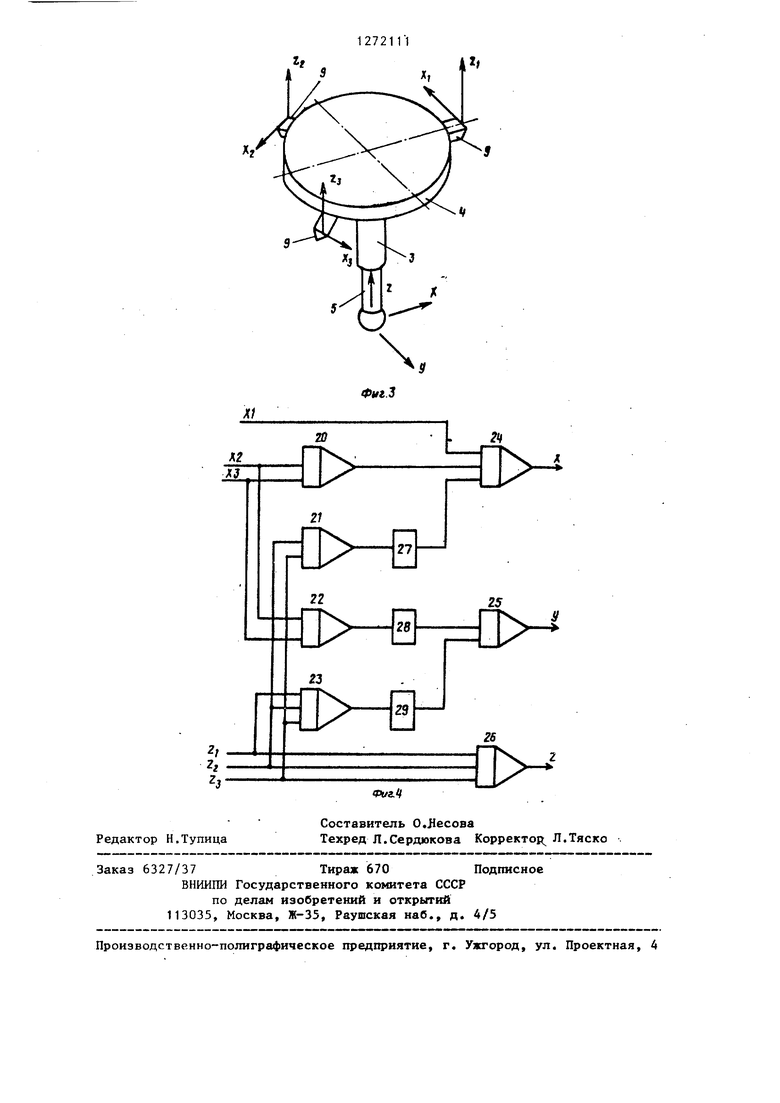
1 Изобретение относится к области измерительной техники и может быть использовано для координатно-измерительных машин. Цель изобретения - повьшшние точности измерений, надежности и расширение функциональных возможностей измерительной головки за счет устранения трения, механического износа и электрической эрозии элементов базирования и придания им свойств двухкоординатных отсчетных систем. На фиг. представлена измерительная головка, на фиг. 2 -функциональная схема измерительной головки; на фиг.З измерительный стержень и компоненты вектора его отклонения; на фиг.4 блок-схема преобразования координат. Измерите}1ьная головка содержит корпус 1, фланец 2, измерительньй стержень 3 с грибком 4 и измерительным наконечником 5, пружины 6 и 7, три полых якоря 8, три ярма 9 с обмотками 10 и полюсными наконечниками 11, три системы автоматического регу лирования, каждая из которых состоит из светодиода 12, фотодиодной матрицы 13, диафрагмы 14, фотоусилителя 15, усилителя 16 мощности, компаратора 17, логический элемент ИЛИ 18, блок 19 преобразования координат, состоящий, в свою очередь, из сумматоров 20 - 26, и регулируемых резистивных делителей 27 - 29. К корпусу 1 прикреплен фланец 2. Измерительный стержень 3 с грибком 4 на одном конце и измерительным наконечником 5 на другом базируется отно сительно фланца 2 при помощи элементов базирования, расположенных на грибке 4 и фланце 2. Пружина 6 созда ет усилие, возвращающее грибок 4 в исходное положение после больших отклонений. Пружина 7 компенсирует вес грибка 4 с закрепленными на нем деталями. Элементы базирования грибка 4 выполнены в виде трех электромагнитных опор, каждая из которых содержит рас положенный на грибке 4 полый якорь 8 расположенное на фланце 2 ярмо 9 с обмотками 10 и полюсными наконечниками 11, расположенный по оси якоря 8 оптронный датчик линейного перемещения в виде установленных на фланце 2 светодиода 12, фотодиодной матрицы 13 и закрепленной внутри полого якор 8 диафрагмы 14, а также фотоусилител 1 i 15, усилитель 16 мощности и компаратор 1 7. Входы фотоусилителя 15 подключены к элементам фотодиодной матрицы 13, выходы - к входам усилителя 16 мощности и компаратора 17, выходы усилителя 16 мощности - к обмоткам 10. Выходы компараторов 17 входящих в каждую систему автоматического регулирования, подключены к входам логического элемента ИЛИ 18, выход которого является сигнальным выходом измерительной головки. Блок 19 преобразования координат, вьшолненный в виде аналоговой вычислительной схемы, подключен своими входами к вьпсодам фотоусилителей 15, входящих в каж,дую систему автоматического регулирования, а его выходы являются координатными выходами измерительной головки,, Входы С5адматоров 20 - 23 и один из из входов сумматора 24 соединены с выходами фотоусилителей 15. Выходы сумматоров 24 - 26 являются выходами блока 19 преобразования координат. Выход сумматора 20 соединен с входом сумматора 24 непосредственно, а выходы сумматоров 21-23 соединены с входами сумматоров 24 - 26, соответственно, через регулируемые резистивные делители 27 - 29, коэффициенты передачи которых К, К , зависящие от длины измерительного наконечника, устанавливаются после его замены. Измерительная головка на примере одной электромагнитной опоры работает следующим образом. Положение якоря 8 стабилизируется по двум координатам системой автоматического регулирования. Закрепленная внутри полого якоря 8 диафрагма 14 формирует из потока излучения ,светодиода 12 луч, падающий на фотодиодную матрицу 13, которая преобразует его в фототоки, пропорциональные части потока излучения, падающей на каждьй элемент фотодиодной матрицы 13,Фотоусилит ль 15 преобразует эти фототоки в сигналы, пропорциональные компонентам вектора отклонения луча относительно осей фотодиодной матрицы 13. Так как углы отклонения луча относительно осей фотодиодной матрицы 13 определяются положением диафрагмы 14,закреплежиой внутри полого якоря 8, сигналы на выходах фотоусилителя 15 пропорциональны компонентам вектора отклонения якоря 8 X и Z (фиг.З), Эти сигналы поступают на вход усилителя 16 мощности, к выходу которого подключены обмотки 10. Они преобразуют выходные сигналы усилите ля 16 мощности в магнитные потоки, протекающие по ярмам 9, полюсным наконечникам 11 и якорям 8, а также по воздушному зазору между якорем 8 и полюсными наконечниками 11. При этом якорь 8 притягивается к полюсным наконечникам 11 с силой, пропорциональной магнитному потоку в этом зазоре. Таким образом, осуществляется регулирование положения якоря 8 по двум координатам. Аналогично работают остальные электромагнитные опоры. Три электромагнитные опоры однозначно определяют положение измерительного -наконечника 5, жестко связанного через измерительный стержень 3 и грибок 4 с тремя якорями 8 относительно корпуса 1, к которому прикреплен фланец 2 с закрепленными на нем ярмами 9 с обмотками 10 и полюсными наконечниками 11, светодиодом 12 и фотодиодной матрицей 13. При касании измерительным наконеч НИКОМ 5 измеряемой детали на якорь 8 через измерительный стержень 3 и грибок А передается измерительное усилие, происходит смещение якоря 8 и установленной в нем диафрагмы 14, в результате чего смещается луч, падающий на фотодиодную матрицу 13, на выходе фотоусилителя 15 появляется сигнал рассогласования, который при превышении установленного порога вызывает срабатывание компаратора 17 и появление сигнала касания на вьпсоде логического элемента ИЛИ, т.е. на сигнальном выходе измерительной головки. Аналогично работают остальные опоры. Компоненты вектора отклонения измерительного наконечника 5, () вычисляются блоком 19 преобразования координат из компонентов векторов отклонения якорей электромагнитных опор в соответствии с уравнениями Л К,()+Кз() (2) z-iczj+z j+zp,(3) где X,Y,Z - компоненты вектора отклонения измерительного наконечника;x,,z компоненты векторов откvnoHeHHH якорей; к,к,к - коэффициенты, зависящие от расположения опор и длины измерительного наконечника. Блок 19 преобразования координат на примере вычисления компоненты X вектора отклонения измерительного наконечника согласно уравнению (1) работает следующим образом. Компонента X вектора отклонения якоря 8 с выхода фотоусилителя 15 первой систеты автоматического регулирования поступает на первый вход сумматора 24. Компоненты Х и Х с выходов фотоусилителей 15 второй и третьей систем автоматического регулирования поступают на входы сумматора 20, а с его выхода их сумма поступает на второй вход сумматора 24. Компоненты Zi и Z с выходов фотоусилителей 15 второй и третьей систем автоматического регулирования поступают на вход сумматора 22, ас его выхода через регулируемьш делитель 27 их разность поступает на третий вход сумматора 24, .выходной сигнал которого пропорционален компоненте X вектора отклонения измерительного наконечника. Аналогично происходит вычисление компонент У и Z вектора отклонения измеритель- . ного наконечника согласно уравнениям (2) и (3). Формула изобретения 1. Измерительная головка, содержащая корпус с фланцем, измерительный стержень с грибком на одном конце и измерительным наконечником на другом, элементы базирования грибка, расположенные на грибке и фланце, пружины, огический элемент ИЛИ, отличащая с я тем, что, с целью повышения точности измерений, надежности расширения функциональных возможностей, элементы базирования выполнены в виде трех электромагнитных опор, аждая из которых снабжена полым якоем, расположенным на грибке, ярмом обмотками и полюсными наконечникаи, расположенными на фланце, распооженном по оси якоря двухкоординатым оптронным датчиком линейного пе$1ремещения в виде установленньпс на фланце светодиода и фотодиодной мат рицы и закрепленной внутри полого якоря диафрагмы, системой автоматического регулирования положения якоря, включающей фотоусилитель, усилитель мощности и компаратор, блоком преобразования координат, входы фото усилителя подключены к элементам фотодиодной матрицы, выходы фотоуснлителя соединены с входами усилителя мощности, компаратора и блока преобразования координат, выходы которого являются координатными выходами изме рительной головки, выходы усилителя мощности подключены к обмоткам ярма электромагнитной опоры, а выходы ком паратора всех электромагнитных опор соединены с соответственными входами логического элемента ИЛИ, выход которого является сигнальным выходом измерительной головки.
Фиг, 11 2, Измерительная головка по п.1, отличающаяся тем, что блок преобразования координат, вьшолненный в виде аналоговой вычислительной схемы, содержащей семь сумматоров, три регулируемых резистивных делителя, входы первых четырех сумматоров и первьй вход пятого сумматора соединены с выходами фотоусилителя измерительной головки, выход первого сумматора соединен с вторым входом пятого сумматора, а выходы второго, (Третьего и четвертого сумматоров подключены к третьему входу пятого сумматора и двум входам шестого сумматора через первый, второй и третий . регулируемый резистивный делитель соответственно, три входа седьмого сумматора подключены к выходам фотоусилителей измерительной головки, а выходы пятого, шестого и седьмого сумматоров являются выходами блока преобразования координат.

| название | год | авторы | номер документа |
|---|---|---|---|
| Измерительная головка | 1986 |
|
SU1409866A1 |
| Измерительная головка | 1985 |
|
SU1413421A1 |
| ОПТОЭЛЕКТРОННОЕ УСТРОЙСТВО КОНТРОЛЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ЛОПАТОК | 2003 |
|
RU2254555C2 |
| РЕЛЕ ЭЛЕКТРОМАГНИТНОЕ | 2009 |
|
RU2400856C1 |
| Измерительная головка | 1986 |
|
SU1379602A1 |
| ДАТЧИК ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ДЕТАЛИ ОТНОСИТЕЛЬНО СИСТЕМЫ КООРДИНАТ СТАНКА | 2015 |
|
RU2597449C1 |
| Измерительная головка | 1984 |
|
SU1330450A1 |
| Измерительная головка | 1978 |
|
SU819567A1 |
| Измерительная головка | 1981 |
|
SU1025994A1 |
| Устройство для контроля изгиба полупроводниковых пластин | 1981 |
|
SU1111023A1 |
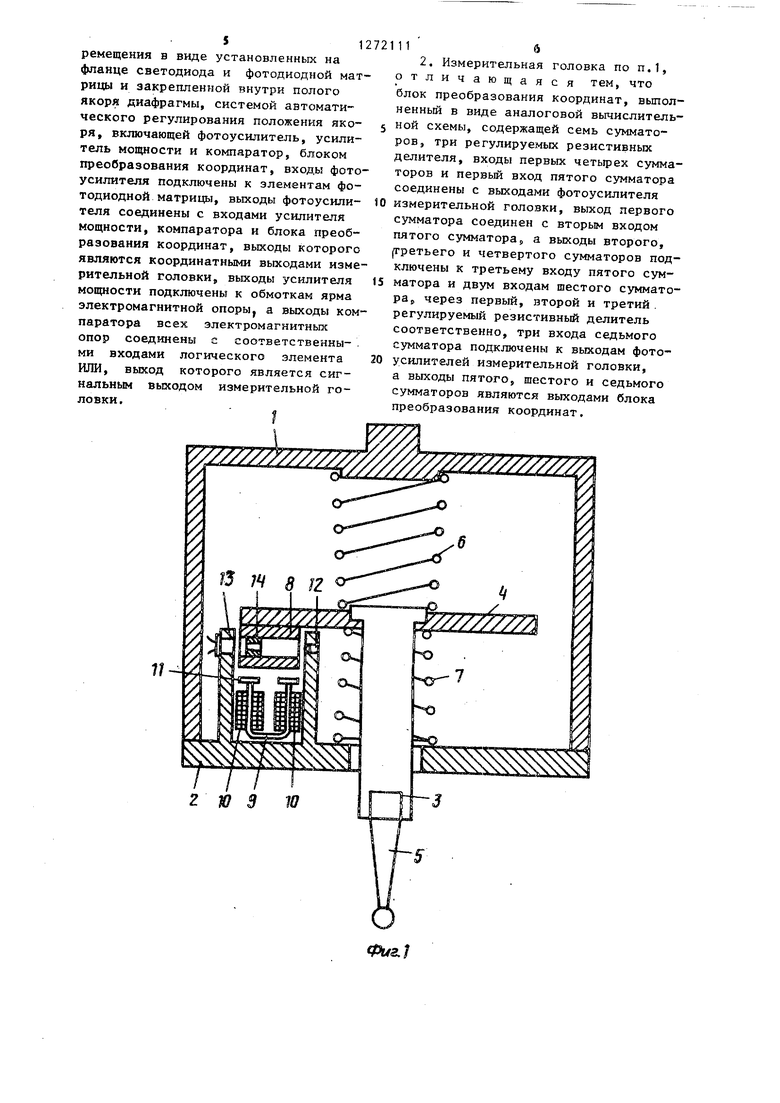
Изобретение относится к области измерительной техники и может быть использовано рля координатно-измерительньпс машин. Цель изобретения - повьппение точности измерений, надежности и расширение функциональных возможностей измерительной головки за счет устранения трения, механического износа и электрической эрозии элементов базирования и придания им свойств двухкоординатных отсчетных систем. Элементы базирования грибка измерительной головки выполнены в виде трех электромагнитных опор, которые однозначно определяют положение измерительного наконечника, жестко связанного через измерительный стержень и грибки с тремя.якорями 8 относительно корпуса. При касании измерительным наконечником измеряемой детали на якорь 8 через измерительный стержень и грибок передается измерительное усилие, происходит смещение якоря 8 и установленной в нем диафрагмы 14, в результате чего смещается луч, падающий на фотодиодную матрицу 13. На выходе фотоусилителя 15 появляется сигнал рассогласования, который вызывает срабатывание компаратора 17 и появление сигнала на выходе логического элемента ИЛИ 18. Компоненты вектора отклонения измерительного накоС/) нечника вычисляются блоком 19 преобС разования координат на основании сигналов, поступающих с выходов фотоусилителя 15, пропорциональных компонентам векторов отклонения якорей 8 электромагнитных опор. 1 з.п. ф-лы, 4 ил.
| УСТРОЙСТВО ДЛЯ СВЕРЛЕНИЯ | 1988 |
|
SU1593050A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
