Изобретение относится к электротехнике, в частности к электроприводу с неограниченным углом поворота, и может быть использовано в прецизионных следящих системах.
Целью изобретения является упрощение электродвигателя..
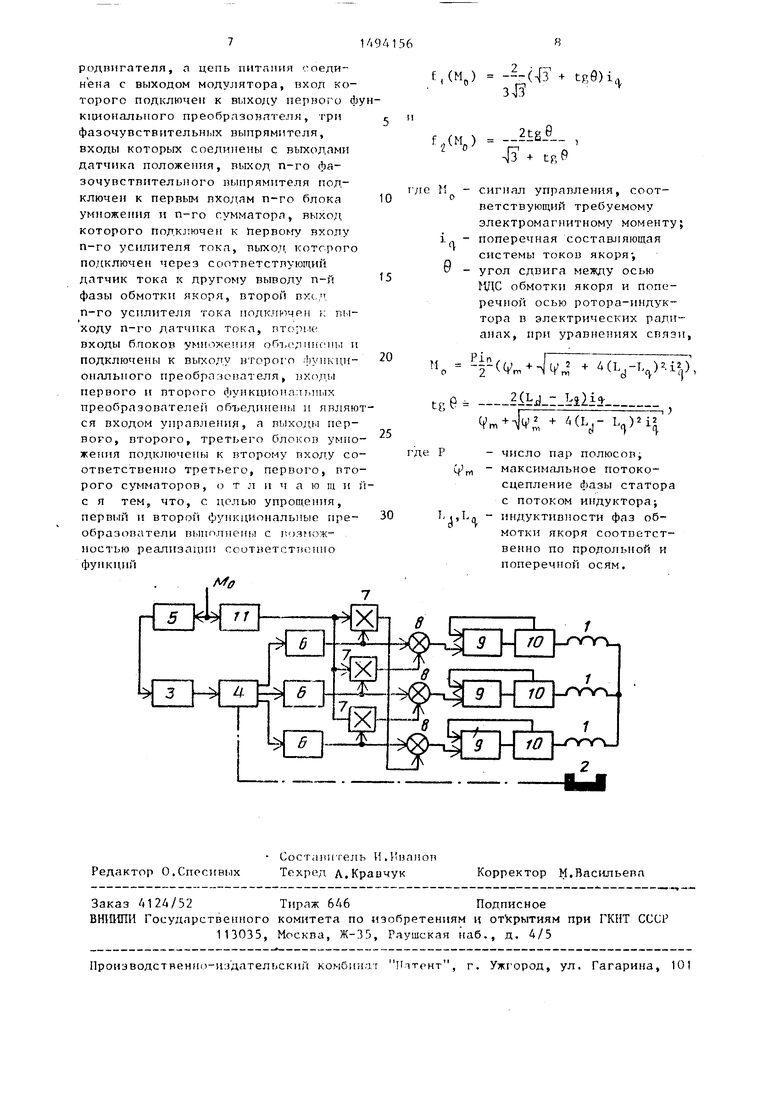
На чертеже изображена функциональная схема моментного вентильного электродвигателя.
Вентильны электродвигатель содержит статор с трехфазной обмоткой 1 якоря, явнополюсньш ротор-индуктор 2, модулятор 3, трехфазный датчик 4 положения, ротор которого механически связан с ротором 2 электродвигателя, а цепь питания соединена с выходом модулятора 3. Вход модулятора 3 подключен к выходу -первого функционального преобразователя 5. Входы фазочувствительных выпрямителей 6 соединены с выходами датчика 4 положения. Выход п-го фазочувст- вительного вьтрямителя 6 подключен к первому входу п-го блока 6 умножения и первому входу п-го сумматора 8. Выход п-го сумматора 8 подключен к первому входу п-го усилителя 9 тока, выход которого подключен через соответствующий датчик 10 тока к зажиму п-й фазы обмотки 1 якоря. Вторые входы блоков 7 умножения объединены и подключены к пыхолу второго функционального преобразователя 11.
СО
СП
о:
Входы первого 5 и второго 11 функциональных преобразователей объединены н являются вход.ом управления. Выход п-го блока 7 умножения подключен к второму входу (п-1)-го сумматора 8. Первый 5 и пторой 11 функциональные преобраэопатели выполнены с возможностью реализации соответственно функ1у1й
ния датчика 4. Н а выходных фазах датчика 4 возникают напряжения
-и,. sinex -sincOt)
-и, sin (ой- -- )sincot; ,„.
/
-U, sin(6i- -)-sin(Ot,
| название | год | авторы | номер документа |
|---|---|---|---|
| Моментный вентильный электродвигатель | 1985 |
|
SU1277308A1 |
| Моментный вентильный электродвигатель | 1985 |
|
SU1275680A1 |
| Моментный вентильный электродвигатель | 1988 |
|
SU1624617A1 |
| Моментный вентильный электродвигатель | 1989 |
|
SU1734172A1 |
| Моментный вентильный электродвигатель | 1986 |
|
SU1345292A1 |
| Моментный вентильный электродвигатель | 1987 |
|
SU1448373A1 |
| Моментный вентильный электродвигатель | 1989 |
|
SU1742949A2 |
| Моментный вентильный электродвигатель | 1984 |
|
SU1171916A1 |
| Автономная система электрооборудования с вентильным электродвигателем | 1987 |
|
SU1457140A1 |
| Способ управления вентильным электродвигателем | 1989 |
|
SU1690160A1 |
ИЗОБРЕТЕНИЕ ОТНОСИТСЯ К ЭЛЕКТРОТЕХНИКЕ И МОЖЕТ БЫТЬ ИСПОЛЬЗОВАНО В ПРЕЦИЗИОННЫХ СЛЕДЯЩИХ СИСТЕМАХ. ЦЕЛЬ ИЗОБРЕТЕНИЯ - УПРОЩЕНИЕ ЭЛЕКТРОДВИГАТЕЛЯ. С ЭТОЙ ЦЕЛЬЮ В МОМЕНТНОМ ВЕНТИЛЬНОМ ЭЛЕКТРОДВИГАТЕЛЕ ФУНКЦИОНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ 5 ВЫПОЛНЕН С ВОЗМОЖНОСТЬЮ РЕАЛИЗАЦИИ ФУНКЦИИ F1(*98M0)=2/3 √3 (√3+TGΘ)IQ , а функциональный преобразователь 11 реализует функцию F2 (*98M0)=2TGΘ(√3 +TGΘ), где μ0 - сигнал управления, соответствующий требуемому электромагнитному моменту
IQ - поперечная составляющая тока якоря
Θ - угол сдвига между осью МДС обмотки якоря и поперечной осью ротора - индуктора 2, при этом μ0=P.IQ/2(ψM+√ψ2+4(LD-LY)2.IG2), а TGΘ=2(LD-LG).IG/(ψM+√ψ2+4(LD-LG)2.IG2, где P - число пар полюсов
ψM - максимальное потокосцепление фазы статора с потоком индуктора
LD, LG - индуктивности фаз обмотки 1 якоря по продольной и поперечной осям. 1 ил.
f,(Ho) зТ Ч
(1)
)
2tS0 Л + tgO
де М - сигнал упрпп.мсния, iOCI ECT-- о
стпуоший требуемому электромагнишому моменту; 1д - поперечная составляющая сис20
темы токов якоря; 9 - угоп сдвига между осью МДС
обмотки якоря и поперечной jq осью ротора- индуктора 2 в электрических радианах, при уравнении связи
Н. 4(ци-4н - (Ь-Ч)Л, 30
tg0
2lLiJ I Li)i2
VmHv -
(2)
где р - число пар полюсOBJ ф - максимальное иотокосцеп- фазы статора с потоком индуктора,
L.,I,,j - индуктивности фаз обмот0 J
ки якоря соответственно
по продольной и поперечной осям,
а вторые зажимы фаз обмотки якоря 1 об7 единены.
Моментный вентильньп электродвигатель работает следующим образом.
На входы функциональных преобразователей 5, 11 подается сигнал, пропорциональный требуемому электро- агнитному моменту М. На выходе функционального преобразователя 5
полумается птгнал --- (л З + tp;6)ia ЗТЗ .55
и , моступлющи) }ia модулятор 3. На его ныхояе получается переменное напряженно, 11итли)шое обмотку позбужд.о
где сО - частота питающего напряжения; об - угол поворота ротора, эл..рад. Эти напряжения поступают на входы фазочувствительных выпрямителей 6, на входах которых образуются напряжения
2 ir -и, , -и. sinC.;, - --) ,
4 п -и, sin(oijr) ,
(4)
поступаюпще на входы блоков 8 суммирования.
На выходе функционального преобразователя 11 получается напряжение
I-I7
л1з + tgG
связанное с углом 0 между осью МДС обмотки якоря и поперечной осью ротора-индуктора 2, которое поступает на входы блоков 7 перемножения, на вторые входы которых подаются напряжения (4). На выходах блоков перемножения получаются напряжения
- L. . SinCoi,-) ,
3|Т
поступающие на вторые входы блоков 8 суммирования соответственно каналов С, А, В. Здесь i - продольная составляющая система токов якоря. На выходах блоков 8 cyм шpoвaния образуются сигналы
- |-i.8in(oi -9);
3 г«
2 ir sin(oi.-0 - --); (5)
9/
- - sinCoi -G-- -J-),
Я1шяюп(леся оптимальными значениями
.0 .0
токов 1д, ig, IP из условия минимума электрических потерь в обмотке при заданном значении электромагнитного момента. Здесь 1 - амплитуда системы статорных токов
4
+ 1
2
t80
ij/i,
На выходах усилителей 9 токов сравниваются оптимальные и действительные токи ip, ij, i° , пропорциональные им сигналы поступают с выходов датчиков 10 тока. Усилители 9 токо-в подают на фазы обмотки статора 1 напряжения, обеспечивающие выполнение равенства
.с
1
fl
.0
6
.0
ч
Соотношения (1), (2), (5) чают из уелопий:
полу
.ог .01
-ft - с
(6)
P(9oi., + ( L) ij.i) M,const (7)
.0
ifl 2/3(i , cosoi sinct),
.0
Ч
2/3(1, cos()-iQ.sin(cii--H
aJ DJ
/
- 2/3(i. cos(oi- --)-ia. sin(ci--) . о j a j
соответстпующих минимуму электрических потерь в обмотке статора и получению требуемого электромагнитного момента, р - число пар полюсов электродвигателя. Последние три ураннения в Teopvin обобщенной электрической машины и соответствуют нулевому току ее нулевой фаз1п.
Соотношения (6)-(8) сводятся к следующим условиям
l2
i min
.S ci-S- j S
м.
const,
Функция Лагранжа и условия ее
стационарности по i.
Ч
имеют вид
. Х ) i
Ч4)i.
+ 1
i2
I-
(J d- ) М °
)o.
(„-ь(1,-1.)
fJ
6
индуктивности фаз стато- ра по продольной и поперечной осям; множитель Лагранжа. его из равенства (9),
т Ч)П ,
.
о
откуда
с)
(Ldi.LUiii
2(L/Ц)
(10)
2(
t
.(L - Ц)
Положим, t;g6 ij/irt. тогда pa2Q венства (8) принимают вид (5), а из равенств; (10) вытекает равенство (3). Равенство (2) получается подста- новкой выражения (10) в выражение (7). Функция (1) не имеет явных аналн25 тических выражений. Поэтому целесообразно их затабулировать, задаваясь произвольным значениям тока in, и определяя по формуле (2) соответствующие значения MQ и tg0. Полученные
30 таблицы используются при настройке 8) функциональных преобразователей 5,11. Использование в каждом канале сигнала одного соседнего канала для формирования оптимального значения тока позволило применить блоки суммирования с двумя входаьн вместо трех. токов (5) равна нулю, что позволяет соединить фазы обмотки якоря в зиезду с изолирсзванной нейтралью.
40 Таким образом, благодаря изменению функщш, реализуемых функциональными преобразователями 5, 1,1, и соединению вторых зажимов фаз обмотки якоря в изолированн:,то нейтраль, .
45 обеспечивается упрощетше схемы мо- ментного вентильного электродвигателя при сохранении высокой стабильности момента и минимальных электрических потерях.
35
50
Формула изобретения
Моментный вентильньп электродвигатель, содержащий статор с трехфаз- 55 ной обмоткой якоря, одни выводы фаз которой объединены, явнополюсный ротор-индуктор, модулятор, трехфазньт датчик положения, ротор которого механически связан с ротором элект
родпигателя, n цепь питания лоеди- нена с выходом модулятора, вход которого подключен к выходу первого фу К1щоиальпого преобразователя, три фазочувствительных выпрямителя, входы которых соединены с выходами датчика положения, выход п-го Ла- зочувстиительного выпрямителя подключен к первым входам п-го блока умножения и п-го сумматора, выход которого подключен к Первому входу п-го усилителя тока, выход которого подключен через соответствующий датчик тока к другому выводу п-й фазы обмотки якоря, второй вхс,,, п-го усилителя тока подклмчр.р) к выходу п-го датчика тока, второю входы блоков умножения оГп,с;1инсч1ы и подключены к выходу второго функц - онального преобразователя, вхол.ы первого и второго функциона:т1 1 ых преобразователе объединены и являются входом управления, а выходы первого, второго, третьего блоков yNnio- жения подключены к второму входу соответственно третьего, первого, второго сумматоров, о т л и ч а ю щ и й с я тем, что, с целью упрощения, первый и второй функциональные пре- образователи выполнены с гозиож- иостью реализации соответственно функций
А//7
f,(M) tg9)i. з45
,)
. 4 -t- tgp
г /ге И - сигнал управления, соответствующий требуемому электромагнитному моменту; i, - поперечная составляющая
системы токов якоря-, У - угол сдвига между осью
НДС обмотки якоря и поперечной осью ротора-индуктора в электрических радианах, при уравнениях связи,
р ; I-1
н, -i-(Vn,HV. (L.-oup,
d Ч
tg е - lirj-i L-iiii
(Lj- L)i|
Р - число пар полюсов
максимальное потокосцепление фазы статора с потоком индуктора; I. .,1.д - индуктив)юсти фаз обмотки якоря соответственно по продольной и поперечной осям.
| Столов Л,И | |||
| и др | |||
| Лвиационные моментные двигатели | |||
| И.: Машиностроение, 1979, с | |||
| Спускная труба при плотине | 0 |
|
SU77A1 |
| 0 |
|
SU186019A1 | |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Моментный вентильный электродвигатель | 1985 |
|
SU1275680A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
