телй тока 11, датчики тока 12. Ротор 2 механически соединен с ротором си- нусно-косинусного вращающегося трансформатора 3. На входы ФП 6, 7 подан сигнал от задатчика момента 13, На выходе ФП 6 вырабатывается сигнал i являющийся поперечной составляющей системы статорных токов, а на выходе ФП 7 - сигнал tgQ, где в угол сдвига между осью магнитодвижущей силы обмотки статора и поперечной осью ротора. На выходах множительных устройств получаются сигналы - inSinot ,
Изобретение относится к электротехнике, в частности к моментным вентильным электродвигателям с неограниченным углом поворота ротора, которые находят широкое применение, в прецизионных следящих системах.
Целью изобретения является снижение пульсаций электромагнитного момента.
На чертеже представлена блок-схема моментного электродвигателя.
Двигатель содержит статор с двухфазной синусной обмоткой 1 ,. ротор 2 являющийся индуктором, синусно-коси нусный вращающийся трансформатор 3, модулятор 4, фазочувствительные выпрямители 5, диодные функциональные преобразователи 6, 7, множительные устройства,8, блок 9 сложения, блок 10 вычитания, усилители 11 тока, датчики 12 тока.
В каждьй канал усиления входят усилитель 11, фазочувствительный выпрямитель 5 и множительное устройство 8. Блок 9 сложения введен в первый канал усиления, а блок 10 вычитания - во второй канал усиления. Вход каждого фазочувствительного выпрямителя 5 подключен к одной из вторичных обмоток синусно-косинусного вращающегося трансформатора 3,
Ротор 2 механически соединен с ротором синусно-косинусного вращающегося трансформатора 3, его вход соединен с выходом модулятора 4, а выходы соединены с входами фазочувстгде с угол поворота ротора и i cosot. Эти сигналы поступают на входы блоков сложения 9 и вычитания 10, на выходах к-рых получаются желаемые значения токов фаз i° и i , к-рые сравниваются с действительными значениями токов фаз i и i. Усилители 1 обеспечивают выполнение ра- венств i 1д, i. i°. В результате повышается стабильность вращающего момента из-за уменьшения чувствительности к погрешностям в определении углов oL и 0 . 1 ил.
вительНых выпрямителей 5, их выходы соединены с входами соответствующих блоков 8 перемножения и соответственно с входом блока 9 сложения и входом блока 10 вычитания. Выход первого функционального преобразователя 6 соединен с управляющим входом модулятора 4, а выход второго функционального преобразователя 7 - с вторыми входами множительных устройств В. К выходу фазочувствительного выпрямителя 5 подключен в первом канале усиления первый вход множительного устройства 8 и первый вход блока
9 сложения, а во втором канале - первый вход соответствующего множительного устройства 8 и первый вход блока 10 вычитания.
Выходы этих блоков соединены с
входами усилителей 11 тока, их вторые входы соединены с вьпсодами датт чиков 12 тока. Фазы 1 обмотки статора соединены с входами датчиков 12 тока и с выходами усилителей 11
тока. Входом двигателя являются входы функциональных преобразователей 6, 7, на которые подан сигнал, пропорциональный требуемому электромагнитному моменту от задатчика 13 величины момента.
Двигатель работает следующим образом.
Сигнал управления в аналоговой форме подается на входы функциональных преобразователей 6, 7, на выходах которых вырабатываются сигналы tg 9 согласно равенствам
M,f(v л;
tg0
.i )Ч
-«V
де M - управляющий сигнал, являюг щийся входным сигналом функциональных преобразовате- .- лей и равный желаемому значению электромагнитного момента;
„ выходной сигнал первого
функционального преобразова-.,. теля, равный поперечной составляющей системы статорнь1х токов; Ц0 - выходной сигнал второго
функционального преобразо- «д вателя
Q - угол сдвига между осью МДС обмотки статора и поперечной осью ротора;
Р - число пар полюсов; js
Ц - максимальное потокосцепле- ние одной фазы с потоком индуктора;
4 а иВДУКтивности фаз обмотки статора соответственно по продольной и поперечной осям.
30
Блоки перемножения, сложения и вычитания формируют желаемые значения фазных токов, а усилители тока под- держивают фазные токи близкими к желаемым.
Модулятор 4 преобразует сигнал in в переменное напряжение, питающее первичную обмотку синусно-косинусно- го вращающегося трансформатора 3. Напряжения на его выходных обмотках изменяются по законам
Uj,giaSirx6L sinu)t; и,К1оСозЫ Bin«3t,
где u3- угловая частота модуляций;
с1 - угол поворота ротора, эл : рад.
Эти напряжения вьтрямляются с учетом фазы и сглаживания фазочувствитель- ными выпрямителями 5, на выходе кото- рьпс получаются сигналы - i, sin ct и
1дСОБо(.
Сигналы с выходов фазочувствитель- ных вьтрямителей 5 и второго функционального преобразователя 7 поступают на входы блоков 8 перемножения, на - выходах которых получаются сигналы
.- .,.
«д
js
- t 0 1(1 Sin d- : - 1 J Sinct i t 0 IQ Cos - i j Cos ,
где i I - продольная составляющая системы статорных токов, На входы блока 9 сложения и блока 10 вычитания поступают сигналы с выходов фазочувствительных выпрямителей 5 по прямым связям и с выходов блоков перемножения - по перекрестным связям. На выходах блоков 9 и JO получаются, желаемые значения токов фач i и i° согласно формулам
А в
i °--- i Sind. ч. v Cosoi -1 S. h (о( - 0); (3) 16 - Ы - i J Sihct Г Cos (о/ - 0), (4 )
где 1 - амплитуда системы статорных
токов.
Эти сигналы поступают на входы : i усилителей 11 тока, где они сравниваются с действительными значениями фазных токов статора, поступающих от датчиков 12 тока. Усилителя II обеспечивают выполнение равенств
IA IA
.0 .0
1„ 1.
в В
Равенства (1) - (4) получаются из условия получения требуемого электромагнитного момента М при минимальных электрических потерях в обмотке статора
MO .
.2
(5)
(6)
r(i% i) r(ij +
где - активное сопротивление фазы
обмотки.
Функция Лагранжа и условия ее стационарности имеют вид
F(i,i ,А )г(4+ iJ)+Ap(H;i.f -(.iAi) ° 2ri/Ap ()
(4J, +() (7)
Исключая из равенст , (6) и (7) житель Лагранжа Л , получаем квадратное уравнение
()i5 + 4(,ia -()i 0 имеющие решение
1 2 1Ы:-ЬаД/.
(8)
V MiLj-L f Ц Подставляя выражения ( 8) в выражение (5), получаем равенство (I) .
Положим, что
.0
i (-e , ig
Cos (c -e). (9)
Из уравнений обобщенной электрической машины
ij -1 д CosoC -1° Sitid, iq -;.Sino. + i° CosdL
I CosQ
и равенств (9) следует, что
ij , Y
При изменении фазных токов вентильного электродвигателя по законам, определяемы равенствами (1)- (А), угол между МДС статора и продольной осью ротора отличается от /2 на корректирующий угол 0 ,, благодаря чему используется реактивный момент, требуемый электромагнитный момент достигается при минимальных электрических потерях, а работа в зоне максимума электромагнитного момента по углу 0 повышает его стабильность и делает двигатель нечувствительным к небольшим погрешностям в определении углов сЯ. и 0 .
Явные аналитические выражения для
10 отличающийся тем, что, с целью сниясения пульсаций электромагнитного момента, он снабжен модулятором, задатчиком величины момента, в первый канал усиления введен
15 блок сложения, а во второй - блок вычитания, управляющий вход модулятора соединен с выходом первого функционального преобразователя, к вьпсо- ду модулятора подключена первичная
20 обмотка вращающегося трансформатора, к выходу фазочувствительного вьшря- мителя подключен в первом канале усиления первый вход множительного устройства и первый вход блока сло25 жения, во втором канале - первый
вход множительного устройства и первый вход блока вычитания, вторые входы каждого множительного устройства соединены с выходом второго
функции if, f(M) и tg0 4(Mo) от- зо функционального преобразователя, вто35
40
X
сутствуют. Поэтому эти функции следует затабулировать с помощью равенств (1) и (2), задаваясь произвольными значениями тока ii и определяя соответствующие з.начения и tg©. Полученные таблицы используются при построении функциональных преобразователей 6 и 7.
Та ким образом, практически при сохранении электромашинной части датчика положения и силовой части схемы питания снижения потребляемая от электрической с.ети мощность за счет введения нелинейной коррекции в маломощную часть схемы питания, т.е. увеличен КПД, а также повьщ1ена стабильность электромагнитного момента по углу поворота ротора за счет работы в зоне максимума электро- магнитного момента.
Формула изобретения
рой вход блока суммирования соединен с выходом множительного устройства второго канала, второй вход блока вычитания соединен с выходом множительного устройства первого канала, выходы блоков сложения и вычитания соединены в своем канале с входом усилителя, входы функциональных пре- образователей.соединены с выходом за- датчкка величины момента, первый функциональный преобразователь выполнен с возможностью реализации функции
45
(./4,.4(VL/i
а второй - с возможностью реализации функции
50
tg
0 2ьа(.
() ic
Моментный. вентильный электродвигатель, содержащий электромеханичес кий преобразователь, включаюш,ий в себя ротор, статор с двухфазной обмоткой, якоря, каждая нз фаз которой
подключена к выходу одного из каналов усиления, содержащего усилитель с обратной связью по току фазы, и фазочувствительный выпрямитель, вход
которого подключен к одной из вторичных обмоток синусно-косинусного вращающегося трансформатора, множительное устройство, а также первый и второй функциональный преобразователь,
отличающийся тем, что, с целью сниясения пульсаций электромагнитного момента, он снабжен модулятором, задатчиком величины момента, в первый канал усиления введен
блок сложения, а во второй - блок вычитания, управляющий вход модулятора соединен с выходом первого функционального преобразователя, к вьпсо- ду модулятора подключена первичная
обмотка вращающегося трансформатора, к выходу фазочувствительного вьшря- мителя подключен в первом канале усиления первый вход множительного устройства и первый вход блока сложения, во втором канале - первый
вход множительного устройства и первый вход блока вычитания, вторые входы каждого множительного устройства соединены с выходом второго
рой вход блока суммирования соединен с выходом множительного устройства второго канала, второй вход блока вычитания соединен с выходом множительного устройства первого канала, выходы блоков сложения и вычитания соединены в своем канале с входом усилителя, входы функциональных пре- образователей.соединены с выходом за- датчкка величины момента, первый функциональный преобразователь выполнен с возможностью реализации функции
45
(./4,.4(VL/i
а второй - с возможностью реализации функции
tg
0 2ьа(.
55
() ic
где М - выходной сигнал задатчика
момента;
щ - выходной сигнал первого функционального преобразователя;
ВЫХОДНОЙ сигнал второго
функционального преобразователя;
угол сдвига между МДС обмотки статора и поперечной 5 осью ротора; число пар полюсов;
ор Н. Швыдкая 6755/52
Составитель А. Санталов Техред В.Кадар
Корр Подп
Тираж 631 ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
5
8
Ц/ - максимальное потокосцепле- ние одной фазы с потоком индуктора;
Ld,L индуктивности фаз обмо тки статора соответственно по продольной и поперечной осям.
Корректор м. Шароши Подписное
| название | год | авторы | номер документа |
|---|---|---|---|
| Моментный вентильный электродвигатель | 1984 |
|
SU1171916A1 |
| Моментный вентильный электродвигатель | 1985 |
|
SU1275680A1 |
| Моментный вентильный электродвигатель | 1986 |
|
SU1345292A1 |
| Вентильный электропривод | 1987 |
|
SU1480084A1 |
| Бесконтактный регулируемый электропривод | 1982 |
|
SU1075344A1 |
| Моментный вентильный электродвигатель | 1989 |
|
SU1734172A1 |
| Реверсивный вентильный электродвигатель | 1983 |
|
SU1153381A1 |
| Вентильный электродвигатель | 1986 |
|
SU1418880A1 |
| Моментный вентильный электродвигатель | 1987 |
|
SU1494156A1 |
| Электропривод | 1979 |
|
SU864476A1 |
Изобретение относится к области электротехники, в частности к моментным вентильным электродвигателям с неограниченным углом поворота ротора, к-рые находят широкое применение в прицизионных следящих системах, ч Целью изобретения является снижение пульсаций вращающего момента. Двигатель содержит статор с двухфазной синусной обмоткой 1, ротор 2, являющийся индуктором, синусно-косинусный вращающийся трансформатор 3, модулятор 4, фазочувствительные выпрямители 5, диодные функциональные преобразователи (ФП) первый 6 и второй 7, множительные устройства 8, блок сложения 9, блок вычитания 10, усилиN9 СО о СХ)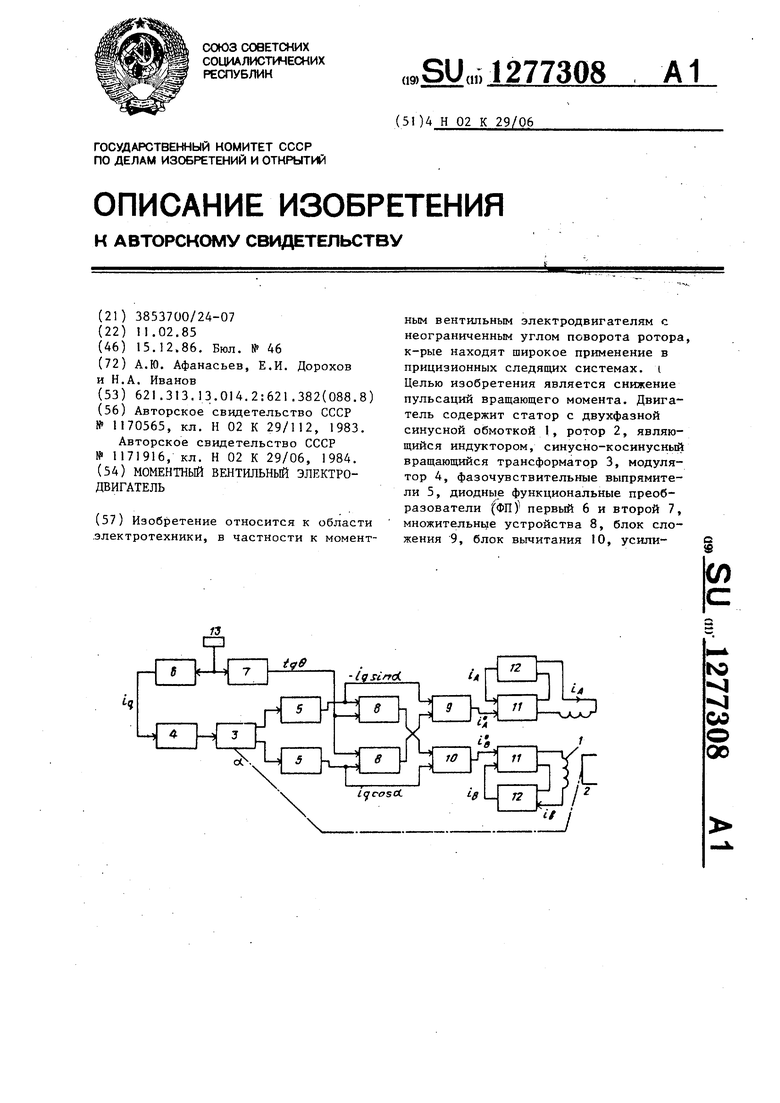
| Моментный вентильный электродвигатель | 1983 |
|
SU1170565A1 |
