Изобретение относится к электротехнике, в частности к электроприводу, и может быть использовано в следящих системах.
Целью изобретения является повышение надежности.
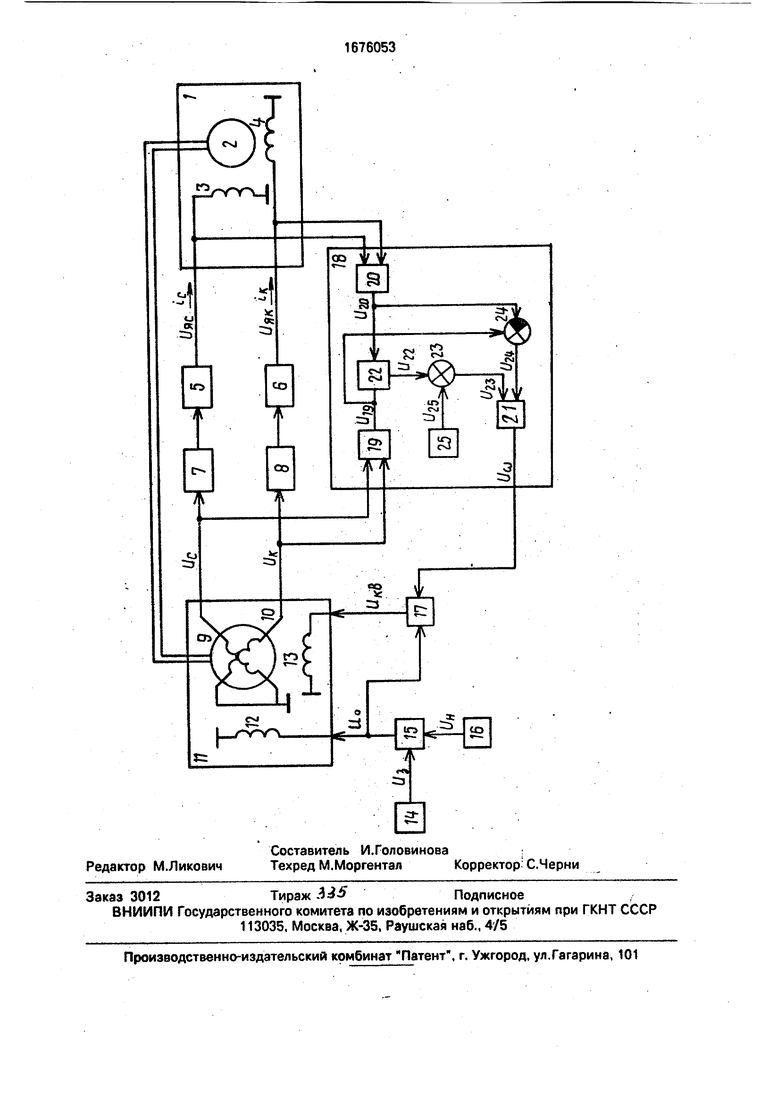
На чертеже представлена функциональная схема вентильного электропривода.
Вентильный электропривод содержит двухфазную синхронную машину 1 с постоянными магнитами на роторе 2 и обмоткой якоря, синусная секция 3 и косинусная секция 4 которой через соответствующие усилители 5 и б мощности и фазочувстви- тельные выпрямители 7 и 8 подключены соответственно к синусной вторичной обмотке 9 и косинусной вторичной обмотке 10 датчика 11 положения, кинематически связанного с ротором 2 двухфазной синхронной машины 1, снабженной основной обмоткой 12 возбуждения и квадратурной обмоткой 13 возбуждения. Основная обмотка 12 возбуждения подключена к выходу задатчика 14 частоты вращения через модулятор 15, опорный вход которого соединен с выводом источника 16 опорного напряжения, а квадратурная обмотка 13 возбуждения к выходу блока 17 умножения, первый вход которого подключен к выходу модулятора 15, а второй - к выходу электронного тахометра 18. Электронный тахометр 18 содержит первый, второй и третий блоки 19- 21 деления, блок 22 умножения, сумматор 23, сумматор-вычитатель 24 и блок 25 задания константы, причем первые и вторые входы первого и второго блоков 19 и 20 деления образуют входы электронного тахометра 18 и подсоединены соответственно к синусной и косинусной вторичным обмоткам 9 и 10 датчика 11 положения и синусной и косинусной секциям 3 и 4 обмотки синхронной машины 1, а их выходы соединены с входами блока 22 умножения, и соответственно с прямым и инверсным входами сумматора-вычитателя 24. Выход блока 22 умножения через сумматор 23, второй вход которого подключен к блоку 25 задания константы, соединен с первым
4«f W
Ё
о
2
8
W
входом третьего делителя 21. Второй вход третьего делителя 21 соединен с выходом сумматора-вычитателя 24, а его выход является выходом электронного тахометра 18.
Вентильный электропривод работает следующим образом.
С задатчика 14 частоты вращения напряжение Уз через модулятор 15, на опорный вход которого с источника 16 опорного напряжения подается напряжение
sln27Tf -t(1)
где U, f - амплитуда и частота опорного напряжения;
t-время,
поступает на основную обмотку 12 возбуждения датчика 11 положения.
Одновременно напряжение с выхода модулятора 15 через блок 17 умножения, где перемножается с напряжением U а поступа- ющим на его второй вход, подается на квадратную обмотку 13 возбуждения.
Таким образом, напряжения на основной и квадратурной обмотках 12 и 13 возбуждения датчика 11 положения опи- сываются выражениями
U0 K U3 sln2jrf t(2)
Uwsln23rf -t(3)
где К - коэффициент передачи модулятора.
Датчик 11 положения выполнен в виде вращающегося трансформатора. Следовательно, в соответствии с принципом его работы на синусной и косинусной вторичных обмотках 9 и 10 формируются напряжения, описываемые выражениями,
Uc К. U3 V, , ,Я )t +
I T U(JJ
4-0+$ sin27Tft;
(4)
Напряжения DC и UK через фазочувст- вительные выпрямители 7 и 8 и усилители 5 и 6 мощности поступают соответственно на синусную и косинусную секции 3 и 4 якорной обмотки синхронной машины 1 и описываются уравнениями
U.e W W К -U, и„к УҐф Wy -К -и,
1 +ивЯ «НтвМ+е+ДаЦ). (7) l (at+e4-/J(oi)J. (В)
где Wф, Wy - передаточные функции фазо- чувствительного выпрямителя и усилителя мощности.
В уравнениях (7) и (8), если пренебречь производными второго и высших порядков, произведения передаточных функций УУф Wy можно представить в виде передаточной функции N3 эквивалентного апериодического звена первого порядка
w°
где Кэ, Тэ - передаточный коэффициент и постоянная времени эквивалентного апериодического звена.
Таким образом, амплитудно-частотная А(ш) и фазочастотная W(co)характеристики последовательно соединенных фа- зочувствительного выпрямителя 7(8) и усилителя 5 (6) мощности описываются выражениями
(10)
1 + (то)Тэр
ip( т) arctg(m со Тэ ) (11)
С учетом выражений (10) и (11) уравнения (7) и (8), описывающие напряжения на синусной и косинусной секциях 3 и 4 якорной обмотки синхронной машины 1, преобразуются к виду

| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электропривод | 1990 |
|
SU1791953A1 |
| Вентильный электропривод | 1988 |
|
SU1713072A1 |
| Вентильный электропривод | 1987 |
|
SU1635243A1 |
| Вентильный электропривод | 1987 |
|
SU1480084A1 |
| Способ настройки моментного вентильного электродвигателя | 1987 |
|
SU1495944A1 |
| Вентильный электропривод | 1988 |
|
SU1654960A1 |
| Моментный вентильный электродвигатель | 1989 |
|
SU1742950A1 |
| РЕВЕРСИВНЫЙ ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1989 |
|
RU1711635C |
| Вентильный электропривод | 1986 |
|
SU1390765A1 |
| Вентильный электропривод | 1988 |
|
SU1510060A1 |
Изобретение относится к электротехнике, в частности к электроприводу, и может быть использовано в следящих системах. Цель изобретения - повышение надежности. В предложенном устройстве электронный тахометр выполнен в виде трех блоков деления, блока умножения, сумматора, сумматора-вычитателя и блока задания константы. Предлагаемая конструкция электронного тахометра позволяет исключить из конструкции устройства третью электрическую машину тахогенератора при сохранении оптимальности настройки во всем диапазоне изменения скорости ротора и линейности механических и регулировочных характеристик, за счет чего достигается поставленная цель. 1 ил.
UK К U3 . и tot +
+ 0+j3(a))-slirtwft,(5)
где m - число пар полюсов синхронной ма- шины 1 и датчика 11 положения;
ш - частота вращения ротора 2 синхронной машины 1;
6 90 эл.град. - угол взаимного расположения статора датчика 11 положения и статора синхронной машины 1, устанавливаемый при наладке вентильного электропривода;
/3 ( о) - угол фазового сдвига, вводи- мый напряжением, поступающим на квадратную обмотку возбуждения и определяемый выражением
/3(о) arctg arctgU о. (6)
U,c К, К U,-ШШ- slntmttit ))-Ч ((В)); (12) Vl +(,f
и,«а|{.-К-и..;..-т«{тт1+а+Дю)-Ф(п|И- (13) Vl +(mo)T, f
Напряжения ияс и 11як вызывают в синусной и косинусной секциях 3 и 4 якорной обмотки синхронной машины 1 токи, описываемые уравнениями
lt-4/K.-K-U,-t±M чЩивИ-в+Д)- Rl.VI + (mot Т. у
-Ща) ч1п(тшг +9)};(14)
|« 4 (К, К U,-r: -wstmait+9+Л«)- R IVi +(та)Т,У
-Ч(о)Д-КЈ-о) -со$(тои )J;(15)
где КЕ - конструктивный коэффициент синхронной машины 1;
R - сопротивление синусной 3 и косинусной А секций якорной обмотки синхронной машины 1.
В соответствии с принципом действия вентильный двигатель настроен оптимально, если угол между вектором магнитодвижущей силы статора FCT, образованной токами, протекающими в секциях якорной обмотки, и вектором магнитодвижущей силы ротора, равен л/2 эл.град.
Таким образом, предлагаемый вентильный электропривод, напряжения и токи в секциях якорных обмоток которого описы- ваются уравнениями (12)-{15) работает в оптимальном режиме во всем диапазоне изменения скорости вращения ротора, если выполняется условие
(0)-44u)-f-(16)
Условие (16) выполняется,если 0(о)1р(й).(17)
Введение угла фазового сдвига 0(ш) обеспечивается подачей на квадра- турную обмотку 13 возбуждения датчика 11 положения напряжения, пропорционального произведению напряжения Уз задания и напряжения информируемого электронным тахометром 18.
Формирование напряжения Ucu осуществляется следующим образом.
На первые и вторые входы первого и второго делителей 18 и 20 электронного тахометра 18 подаются соответственно на- пряжения Uc и UK с синусной и косинусной выходных обмоток 9 и 10 датчика 11 поло- жения и напряжения ияс, ияк с выхода усилителя 5 и 6 мощности. Напряжения Uig, Uao на их выходах, таким образом, описываются уравнениями
Uig Kg -tg mu t+0+0(о); (18) Uao Kg )t+0+0(й)-Чг(о)1,
(19)
где Kg - коэффициент передачи блоков деления.
Эти напряжения поступают на входы блока 22 умножения и входы сумматора-вы- читателя 24. Следовательно, уравнения, описывающие напряжения U22, U24 по выходам указанных блоков, имеют вид
U22 + 0+0 (ft)) -tgtmwt + + 0+0(0))(у);(20)
U24 Kgftg m со t + в + 0 ( а)) - tg m со t + + 0+0(w)-4 (u))j.(21)
В сумматоре 23 к напряжению IJ22 прибавляется напряжение U25, поступающее с блока 25 задания константы, т.е.
U23 U25 + K| tg m и) t + в + 0 (со ) )t+0+0(0)) -ЧЧо)Ь (22) где IJ23 - напряжение на выходе сумматора 23.
С выхода сумматора-вычитателя 24 и сумматора 23 напряжения поступают соответственно на первый и второй входы третьего блока 21 деления. Уравнение, описывающее напряжение DU) на его выходе, получают в результате деления выражения (21) на выражение (22). Таким образом
UM 4 io|mait+9+Ј(li01-Ki ma)|+9 + (m)-V(a,)
Uis-tll, 1« тш|+е+/;(ш) 15 та1г-гЈ+Д(а)ф(ги) 1
Если установить напряжение на выходе блока 25 задания константы U25 Kg2, то выражение (23) преобразуется к виду
. j
™
В соответствии с основными формулами тригонометрии можно запасать тождество
,(ш) . ps)
4lra«,+e+/J(e)-4.(«3l. ps)
Подставляя тождества (25) и (26) в уравнение (24) после преобразований получим
.. sin там+б+ДОи) - cos там±0+Й (а С«ф1. иш cosfmeut +У+ДГаТ5) eos т ом +в +/)(«))- Ч (б)) +
-co8 mam-0-f/}(a)l.:«m;inaM±9+g(ai)-4 ( TsiHTmiui +t)+li(u)Y-s(n mait +U + f (и)-Ч {«Л
) cos
г -«вЧЧ«.
(27)
С учетом уравнения (11) уравнение (27)
приобретает вид
Uy .(28)
Подставив уравнение (27) в уравнение
(6), находят
/J(a)) arctglb arctgte44o)4(w). (29)
Уравнение (29) показывает, что в предлагаемом электроприводе выполняется равенство (17), что приводит к выполнению условия (16) оптимальной настройки вентильного электропривода.
С учетом уравнений (27)-{29) уравнения (12) и (131 преобразуются к виду
ияс Кэ К U3 sin (m on Н-б): (30) иЯк Кэ К U3 -cos(mft)t+0); (31) 1с 1/Р.Кэ К U3 sin (mot+9)- -КЕ-ft sin (m cot+0)1;(32)
1к К -U3 -cos(mftn+0)
- KEO cos (m cot + 0).(33)
Если угол между векторами магнитодвижущей силы статора и ротора равен 90 эл.град, то в соответствии с принципом действия вентильного электропривода токи 1с и IK образуют в расточке статора вращающее магнитное поле, в результате взаимодействия которого с магнитным полем ротора 2 возникает вращающий момент, пропорциональный амплитуде токов ic и IK, протекающих в синусной и косинусной секциях 3 и 4 якорной обмотки синхронной машины 1, а ротор вращается со скоростью, пропорциональной амплитуде напряжений, прикладываемых к секциям якорных обмоток, т.е.
-(Кэ К -U3-KEft); (34)
со Кэ К U3, (35)
где Км - конструктивный коэффициент синхронной машины, устанавливающий связь между моментом и током.
Анализ уравнений (34) и (35) показывает, что механические и регулировочные характеристики вентильного электропривода линейны.
Формула изобретения
Вентильный электропривод, содержащий двухфазную синхронную мащину с постоянными магнитами на роторе и обмоткой якоря, синусная и косинусная секции кото- рой через последовательно соединенные
0
5
5
п
с
Q
усилитель мощности и фазочувствитель- ный выпрямитель подключены соответственно к синусной и косинусной вторичным обмоткам датчика положения, кинематически связанного с ротором синхронной машины и снабженного основной и квадратурной обмотками возбуждения, при этом основная обмотка возбуждения подключена к выходу задатчика частоты вращения через модулятор, опорный вход которого соединен с выходом источника опорного напряжения, а квадратурная обмотка возбуждения подключена к выходу блока умножения, первый вход которого подключен к выходу модулятора, а второй - к выходу датчика скорости, отличающийся тем, что, с целью повышения надежности, в качестве датчика скорости использован электронный тахометр, влкючающий первый, второй и третий блоки деления, блок умножения, сумматор, сумматор-вычита- тель и блок задания константы, причем первые и вторые входы первого и второго блоков деления образуют входы электронного тахометра и подсоединены соответственно к синусной и косинусной вторичным обмоткам датчика положения к синусной и косинусной секциям обмотки синхронной машины, а их выходы соединены с входами блока умножения и соответственно с прямым и инверсным входами сумматора-вычитателя, выход блока умножения через сумматор, второй вход которого подключен к блоку задания константы, соединен с первым входом третьего делителя, второй вход третьего делителя соединен б выходом сумматора-вычитателя, а его выход является выходом электронного тахометра.
| Вентильный электродвигатель | 1986 |
|
SU1418879A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
