Изобретение относится к электронно-лучевым приборам, в частности к устройствам для управления положением объектов в растровом электронном микроскопе.
Целью изобретения является расширение функциональных возможностей путем обеспечения перемещения объектодержателя в вертикальном направлении .
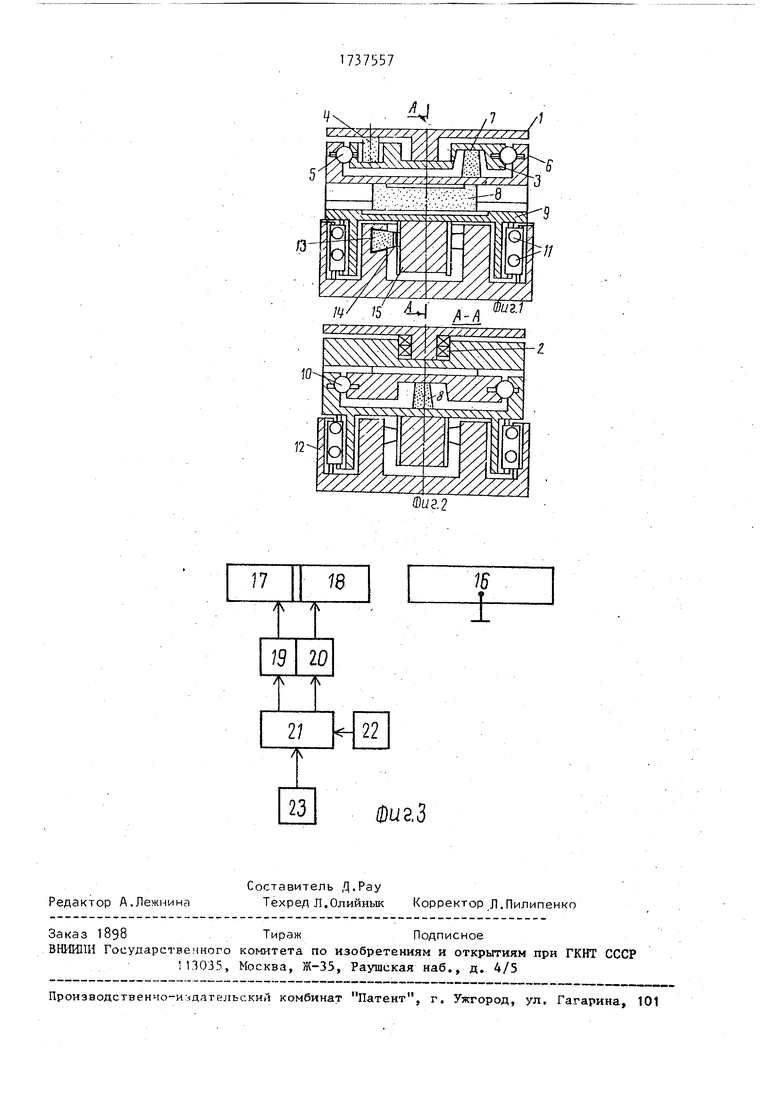
На фиг. 1 изображено предлагаемое устройство, общий вид, на фиг.2- разрез А-А на фиг.1, на фиг. 3 - схема подключения электронов стержневых пьезокерамических элементов к блок-схеме питания и управления устройством.
Устройство содержит цилиндрический объектодержатель 1, ось которого через шарикоподшипники 2 установ-1 лена в каретке 3. В каретке 3 для
перемещения объектодержателя- 1 в тангенциальном направлении установлен стержневой пьезокерамический привод 4, рабочий конец которого фрикционно сопряжен с нижней частью объектодержателя 1. Каретка 3 перемещения вдоль координаты X через шариковые направляющие 5 установлена в каретке 6 перемещения вдоль координаты Y, причем нижняя сторона каретки 3 фрикционно сопряжена с рабочими концами стержневого пьезоке- рамического привода 7, закрепленногс вдоль координаты X на верхней части каретки 6 перемещения по координате Y. Нижняя часть последней фрикционно сопряжена с рабочими концами стержневого пьезокерамического привода 8, упруго установленного вдоль координаты Y в корпусе 9 предметного столика, через шариковые направляю- -
СО 1
сд ел |
щие 10 сопряженном с кареткой 6, а через вертикально расположенные шариковые направляющие 11 - с дополнительным корпусом 12. В корпусе 12 упруго установлены три дополнительных стержневых пьезокерамиче- ских привода 13, в средних частях которых жестко закреплены башмаки И, при помощи резьбы сопряженные с винтом 15, верхний конец которого фрикционно сопряжен с нижней частью корпуса 9. Один электрод 16 каждого стержневого пьезокерамического привода заземлен, а другой разделен относительно его поперечной оси симметрии на две равные части 17 и 18, которые через выходные усилители 19 и 20 и коммутатор 21, управляемый от низкочастотного генератора 22, соединены с задающим генератором 23.
Устройство работает следующим образом .
В исходном положении объектодер- жатель Т находится в заторможенном состоянии под действием фрикционных сил торможения между соприкасающимися рабочими поверхностями первого стержневого пьезокерамического привода k и нижней плоской частью объек- тодержателя 1.
При подключении одной половины электрода пьезокерамического привода через выходной усилитель 19 и коммутатор 21, на выходе которого имеется низкий логический уровень от низкочастотного генератора 22, к задающему генератору 23, настроенному на резонансную частоту механических колебаний возбуждаемых пьезокерамических приводов, в приводе возбуждаются механические однокомпонентные толщин- ные колебания, асимметричной интенсивности в разделенных частях, траектория движения которых на поверхности привода k носит прямолинейный характер. При этом происходит вращение объектодержателя 1. Реверс вращения осуществляется путем подачи питающего напряжения на другую половину разделенного электрода привода . Практически это осуществляется подачей высокого логического уровня от генератора 22 на вход управления коммутатора 21, что приводит к пере41 ключению питающего напряжения от задающего генератора 23 на другую поло- вину пьезокерамического привода t и, I
17375574
следовательно, изменению направления вращения объектодержателя 1.
Перемещения по направлениям коор, динат X и Y осуществляются аналогично только под действием вибродвижущих сил, создаваемых аналогичными пьезокерамическими приводами 7 и 8, каретки 3 и 6 перемещаются прямоли10 нейно. Вертикальное перемещение объектодержателя 1 или перемещение по координате Z происходит следующим образом. В исходном состоянии винт 15 находится в заторможенном.состо15 янии под действием сил трения между резьбовыми поверхностями башмаков 1 и винта 15. Это означает, что отсутствует перемещение объектодержателя 1 по координате Z.
30
35
20 1
При подключении половины 17 электрода каждого из трех дополнительных стержневых пьезокерамических приводов 13 через выходной усилитель,
25 например усилителя 1$,и коммутатор 21, на входе которого при этом находится низкий логический уровень, например, от низкочастотного генератора 22, к задающему генератору 23, настроенному на резонансную частоту механических колебаний возбуждаемых элементов, в стержневых пьезокерамических приводах 13 возбуждаются механические колебания асимметричной интенсивности, т.е. амплитуда механических колебаний существенно выше в той половине стержневого пьезокерамического привода 13, в которую подается электрическое напряжение. Это позволяет возбудить интенсивные ме40 ханические колебания не только в конце пьезокерамического привода 13, но и в его средней части, в которой жестко закреплены башмаки 14, имеющие резьбовую поверхность. Таким образом, интенсивные механические колебания возбуждаются не только в средних частях дополнительных пьезокерамических приводов 13, но и в жестко с ними связанных башмаках . Под воздействием башмаков, которые жестко соединены со средней частью пьезокерамических приводов 13, винт 15 осуществляет вращение в сторону действия менее интенсивных механических
55 колебаний. Под действием вращающегося1 винта 15 корпус 9 перемещается вверх, обеспечивая перемещение объектодержателя 1 по координате Z.
45
SO
1
При подключении половины 17 электрода каждого из трех дополнительных стержневых пьезокерамических приводов 13 через выходной усилитель,
например усилителя 1$,и коммутатор 21, на входе которого при этом находится низкий логический уровень, например, от низкочастотного генератора 22, к задающему генератору 23, настроенному на резонансную частоту механических колебаний возбуждаемых элементов, в стержневых пьезокерамических приводах 13 возбуждаются механические колебания асимметричной интенсивности, т.е. амплитуда механических колебаний существенно выше в той половине стержневого пьезокерамического привода 13, в которую подается электрическое напряжение. Это позволяет возбудить интенсивные механические колебания не только в конце пьезокерамического привода 13, но и в его средней части, в которой жестко закреплены башмаки 14, имеющие резьбовую поверхность. Таким образом, интенсивные механические колебания возбуждаются не только в средних частях дополнительных пьезокерамических приводов 13, но и в жестко с ними связанных башмаках . Под воздействием башмаков, которые жестко соединены со средней частью пьезокерамических приводов 13, винт 15 осуществляет вращение в сторону действия менее интенсивных механических
колебаний. Под действием вращающегося1 винта 15 корпус 9 перемещается вверх, обеспечивая перемещение объектодержателя 1 по координате Z.
При поступлении высокого логического уровня от низкочастотного генератора 22 на вход управления коммутатора 21 напряжение от задающего генератора через усилитель 20 посту- пает на другие половины 18 электродов дополнительных стержневых пьезо- керамических элементов 13- При этом винт 15 перемещается в противоположном направлении и корпус 9 с объ- ектодержателем 1 перемещаются вниз.
Таким образом, возбуждение управляемых однокомпонентных механических колебаний в резьбовых поверхностях башмаков и винта позволяет дополнительно осуществлять перемещение предметного столика по координате Z, что расширяет его Функциональные возможности.
Формула изобретения
Многокоординатный предметный столик, содержащий корпус, первую каретку для перемещения вдоль координаты Y, установленную в корпусе на шариковых направляющих вторую каретку для перемещения вдоль координаты X, установленную на шариковых направляющих в первой каретке, цилиндрический объектодержатель, установленный на шарикоподшипниках во второй каретке с возможностью вращения вокруг вертикальной оси столика, и стержневые пьезокерамические приводы, первый из которых ориентирован в направлении координаты Y, одной гранью закреплен на корпусе, а противоположной гранью фрикционно сопряжен с нижней поверхностью пер0
5
0
вой каретки, при этом второй привод, ориентированный по координате X, одной гранью закреплен на верхней поверхности первой каретки, а противоположной фрикционно сопряжен с нижней поверхностью второй каретки, на верхней поверхности которой закреплен третий привод, фрикционно сопряженный с нижней поверхностью цилиндрического объектодержателя и ориентированный для перемещений в тангенциальном направлении, причем электроды стержневых пьезокерами- чес ких приводов разделены на секторы и подключены к задающему генератору электрических импульсов через усилители мощности, отличаю щи й- с я тем, что, с целью расширения функциональных возможностей путем . обеспечения перемещения объектодер- жателя в вертикальном направлении, введены дополнительный корпус с вертикально расположенными внутри него шариковыми направляющими, винт, три дополнительных стержневых пьезо-. керамических привода с башмаками, торцовая поверхность которых выполнена резьбовой, причем корпус через шариковые направляющие установлен в дополнительном корпусе, внутри которого вертикально размещен винт, фрикционно сопряженный торцовой поверхностью с нижней поверхностью корпуса, а резьбовой - с резьбовы- 5 ми поверхностями башмаков, закрепленных на соответствующих дополнительных стержневых пьезокерамических элементах, установленных в дополнительном корпусе равномерно вокруг винта.
5
0
0
ц/ 75 4-4
ШТ
| название | год | авторы | номер документа |
|---|---|---|---|
| Предметный столик растрового электронного микроскопа | 1987 |
|
SU1522318A1 |
| Вибрационный микротитратор | 1990 |
|
SU1712815A1 |
| Координатный вибропривод | 1979 |
|
SU851563A1 |
| Вибрационный двигатель | 1991 |
|
SU1824662A1 |
| Дозирующее устройство | 1989 |
|
SU1654786A2 |
| Электрогидравлический привод | 1988 |
|
SU1498983A2 |
| Устройство перемещения | 1985 |
|
SU1287088A1 |
| Устройство для получения вращательного движения Абрамова Валентина Алексеевича (Абрамова В.А.) | 2016 |
|
RU2654690C9 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП, СОВМЕЩЕННЫЙ С УСТРОЙСТВОМ МОДИФИКАЦИИ ПОВЕРХНОСТИ ОБЪЕКТА | 2012 |
|
RU2572522C2 |
| Устройство позиционирования магнитных головок | 1985 |
|
SU1345252A1 |
Использование: перемещение исследуемого объекта в электронных микроскопах по трем координатам и его вращение в плоскости XY. Сущность изобретения: для перемещения объектодержателя по оси Z в него введены дополнительный корпус, винт и три дополнительных пьезокерами- ческих привода с башмаками, торцовая поверхность которых выполнена резьбовой и сопряжена с резьбовой поверхностью винта, установленного в дополнительном корпусе вертикально и фрикционно сопряженного с корпусом столика. При этом корпус столика установлен на вертикальных шариковых направляющих в дополнительном корпусе. 3 ил.
E22
ifb
FIP4
TF
tW////77/.
17
18
/ л
19
10
/
/
2
л
///.///// //
VvVVvVvS
Ш|
N.N .
F
±3.
ж
16
| Авторское свидетельство СССР № 10181751, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
