8
2
А
-п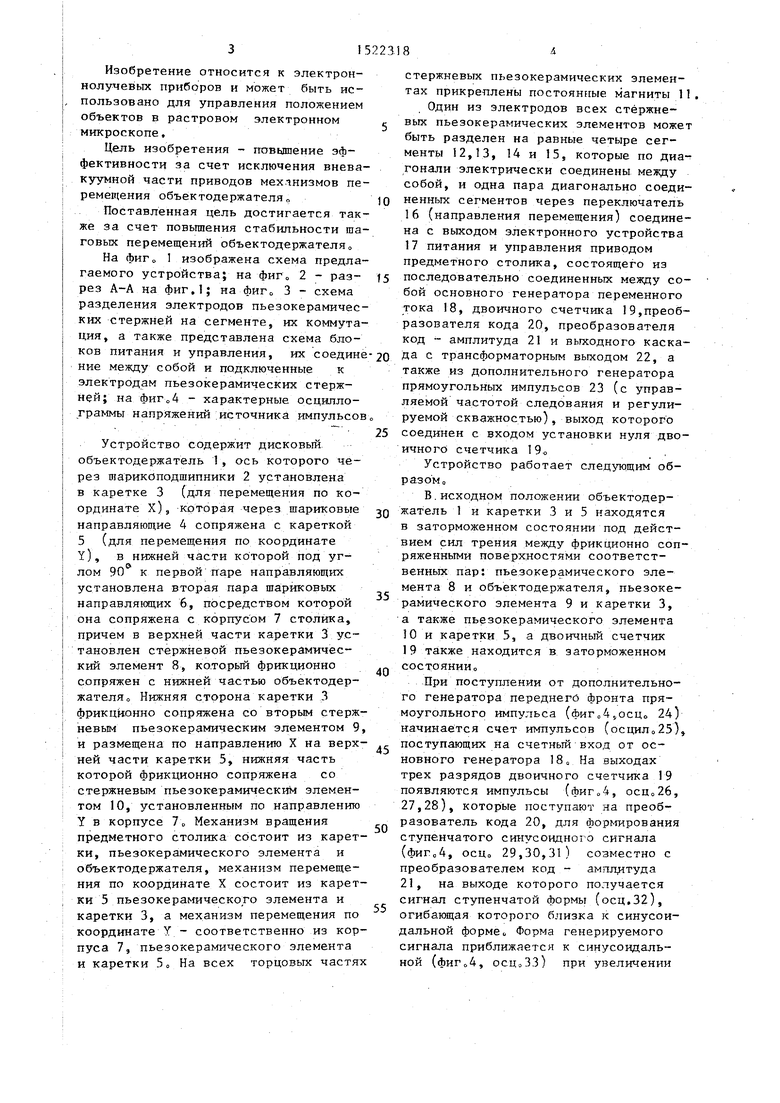

| название | год | авторы | номер документа |
|---|---|---|---|
| Многокоординатный предметный столик | 1990 |
|
SU1737557A1 |
| Вибрационный микротитратор | 1990 |
|
SU1712815A1 |
| Вибрационное лентопротяжное устройство | 1988 |
|
SU1597916A1 |
| Устройство позиционирования магнитных головок | 1985 |
|
SU1345252A1 |
| Устройство для считывания графической информации | 1981 |
|
SU1005103A1 |
| Электрогидравлический привод | 1988 |
|
SU1498983A2 |
| Двухкоординатный стол | 1980 |
|
SU948603A1 |
| УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ РАСТРИРОВАННЫХ | 1973 |
|
SU369756A1 |
| Устройство проекционного экспонирования промежуточных фотооригиналов | 1984 |
|
SU1267343A1 |
| ЛУЧЕВОЙ ТЕСТЕР | 1990 |
|
RU2018149C1 |
Изобретение относится к электровакуумным приборам и может быть использовано для управления положением объектов в растровом электронном микроскопе. Цель изобретения - повышение эффективности - достигается путем исключения вневакуумной части приводов механизмов перемещения объектодержателя и повышения стабильности его перемещения. Предметный столик растрового электронного микроскопа содержит дисковый объектодержатель 1, ось которого через шарикоподшипники 2 установлена на каретке 3, которая через шариковые направляющие 4 сопряжена с кареткой 5. В устройстве осуществляется жесткая синхронизация импульсов управления с работой основного генератора, что существенно повышает стабильность шаговых перемещений предметного столика. 1 з.п. ф-лы, 4 ил.
Y7)f/7/X///y.
хЧ-чч-ч X Ч. ЧХУ ЧЧХХХЛ .
А/////// /7А
ХУ ЧЧХХХЛ
(ригЛ -
Изобретение относится к электроннолучевых приборов и может быть использовано для управления положением объектов в растровом электронном микроскопе.
Цель изобретения - пивьшение эффективности за счет исключения внева- куумной части приводов мехлнизмов пе- ремеп(ения объектодержателя„
Поставленная цель достигается также за счет повышения стабильности шаговых перемещений объектодержателяо
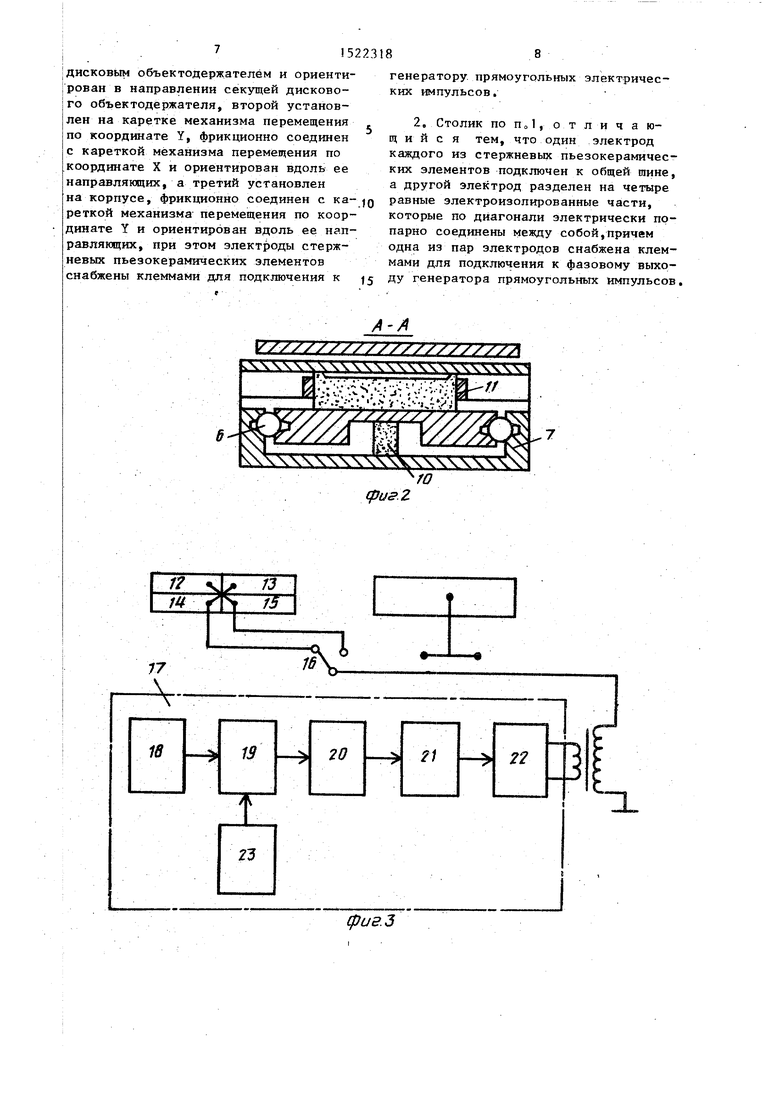
На фиг о 1 изображена схема предлагаемого устройства; на фиГо 2 - раз- рез А-А на фиг.1; на фиго 3 - схема разделения электродов пьезокерамичес- ких стержней на сегменте, их коммутация, а также представлена схема блоков питания и управления, их соедине ние между собой и подключенные к электродам пьезокерамических стержней; на фиго А - характерные осциллограммы напряжений источника импульсов
Устройство содержит дисковый
объектодержатель 1, ось которого через шарикоподшипники 2 установлена в каретке 3 (для перемещения по координате Х), которая через шариковые направляющие 4 сопряжена с кареткой 5 (для перемещения по координате Y), в нижней части которой под углом 90 к первой паре направляющих установлена вторая пара ша:ршсовых направлянщих 6, посредством которой она сопряжена с корпусом 7 столика, причем в верхней части каретки 3 установлен стержневой пьезокерамичес- кий элемент 8, который фрикционно сопряжен с нижней частью объектодер- жателяо Нижняя сторона каретки 3 фрикционно сопряжена со вторым стержневым пьезокерамическим элементом 9 и размещена по направлению X на верх- ней части каретки 5, нижняя часть которой фрикционно сопряжена со стержневым пьезокерамическим элементом 10, установленным по направлению Y в корпусе 7о Механизм вращения предметного столика состоит из каретки, пьезокерамического элемента и объектодержателя, механизм перемещения по координате X состоит из каретки 5 пьезокерамического элемента и каретки 3, а механизм перемещения по координате Y - соответственно из корпуса 7, пьезокерамического элемента и каретки 5 На всех торцовых частях
стержневых пьезокерамических элементах прикреплены постоянные магниты 1
Один из электродов всех стержневых пьезокерамических элементов может быть разделен на равные четыре сегменты 12,13, 14 и 15, которые по диагонали электрически соединены между собой, и одна пара диагонально соединенных сегментов через переключатель
16(направления перемещения) соединена с выходом электронного устройства
17питания и управления приводом предметного столика, состоящего из последовательно соединенных между собой основного генератора переменного тока 18, двоичного счетчика 19,преобразователя кода 20, преобразователя код - амплитуда 21 и выходного каскада с трансформаторным выходом 22, а также из дополнительного генератора прямоугольных импульсов 23 (с управляемой частотой следования и регулируемой скважностью), выход которого соединен с входом установки нуля двоичного счетчика 19«
Устройство работает следующим образом „
В.исходном положении объектодержатель 1 и каретки 3 и 5 находятся в заторможенном состоянии под действием сил трения между фрикционно сопряженными поверхностями соответственных пар: пьезокерамического элемента 8 и объектодержателя, пьезокерамического элемента 9 и каретки 3, а также пьезокерамического элемента 10 и каретки 5, а двоичньш счетчик 19 также находится в заторможенном состоянии
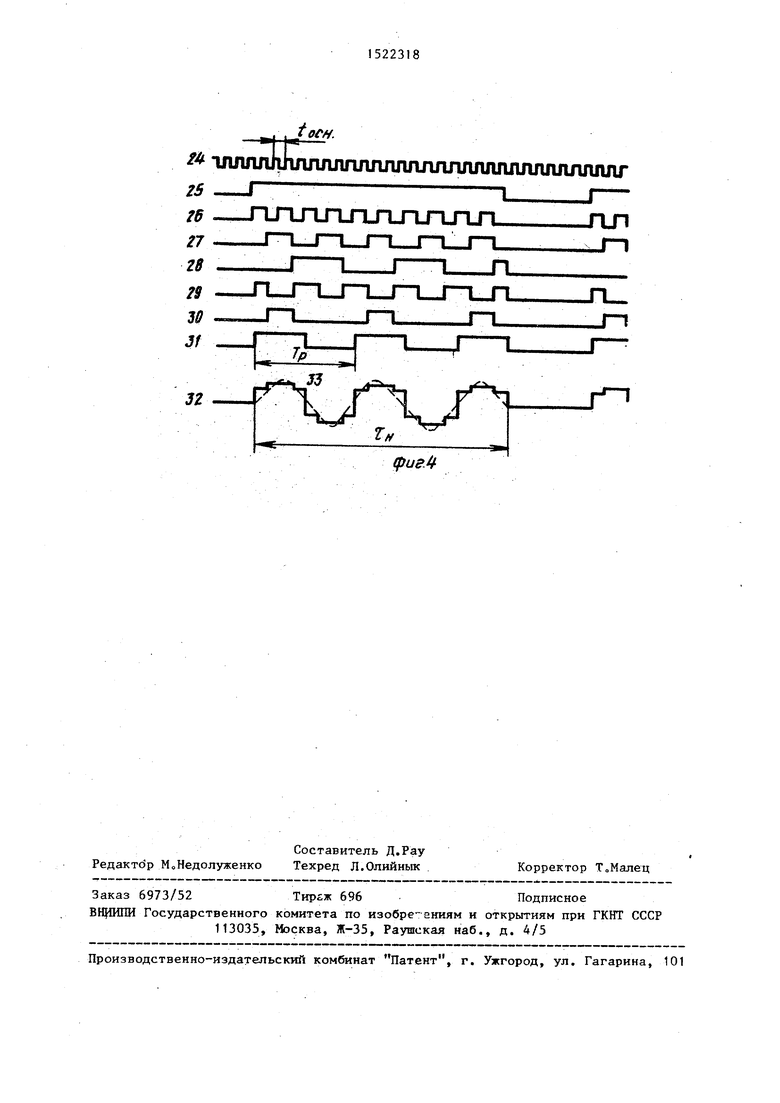
При поступлении от дополнительного генератора переднего фронта прямоугольного импульса (фиГоД„осцо 24) начинается счет импульсов (осцило25), поступающих На счетный вход от основного генератора 18„ На выходах трех разрядов двоичного счетчика 19
появляются импульсы (фИГ„4, ОСЦо26,
27,28), которые поступают на преоб- разоЕ1атель кода 20, для форьшрования ступенчатого синусоидного сигнала (фиг,4, осЦо 29,30,31) совместно с преобразователем код - 21, на выходе которого получается сигнал ступенчатой формы (осц,32), огибающая которого близка к синусоидальной форме о Форма генерируемого сигнала приближается к синусоидальной (фиГо4, осЦоЗЗ) при увеличении
F 2 F
ООНp
515
количества разрядов двоичного счетчика. Частоту основного генератора Fpj. определяют по формуле
(1)
где N - количество разрядов двоичного счетчика; FP - рабочая частота пьезокерамического элемента,
Сигнал ступенчатой формы (близкой к синусоццальной) поступае.т на конеч- ньй усилитель 22с трансформаторным выходом, с которого поступает на сег- менть 13,14 или 12,15 в зависимости от положения переключателя (направления перемещения) 16, под действием которого в стержневых пьезокерамичес- ких элементах возбуждаются продольные и изгибные колебания, результи- рующие колебания которых на рабочих концах пьезокерамических элементов имеет эллипсообразную форму
Под действием этих колебаний, например между рабочим концом стерж- невого пьезокерамического элемента 8 и фрикционно с ним сопряженного ципиндрического объектодержателя I, последний осуществляет вращательное движение в ту или другую сторону, в Зависимости от направления траектории эллипсообразных результирующих колебаний на рабочем ко нце пьезоэле- мента, который в свою очередь зависит от положения переключателя 16 (направления перемещения).Величина осуществляемых перемещений и частота их повторения регулируется путем установки длительности прямоугольного импульса на выходе блока 23, так как величина отдельных шаговых перемещений S определяется по формуле
S -4i--0-.
где ср - координата перемещений;
TO - длительность импульса возбуждения;t - время
Величина шага, определенная выра- жением (2), справедлива, когда продолжительность импульса возбуждения позволяет достичь установившегося режима колебаний стержневого пьезокерамического элемента,
Аналогично происходит направление перемещения, кареток по координатам X и Y, Только в этом случае нап86
ряжение от устройства 17 питания поступает на соответствующие пьезоке- рамические элементы 9 и 10, а постоянный фрикционный контакт между пьезо- элементами и перемещаемьгми объектами осуществляется при помощи постоянных магнитов 11, упруго закрепленных на торцах стержневых пьезоэлементов в непосредственной близости от поверхностей перемещаемых объектов (соответственно объектодержателя и кареток)
Созда;ние вибродвижущей силы непосредственно в направляющих предметного столика, находящегося в вакууме, управляемой диctaнциoннo при помощи электронного блока питания и управлеимя, позволяет исключить вневакуумную механическую часть предметного столика, что существенно упрощает герметизацию предметного столика Формирование питающего и управлякяцего напряжения при помощи элементов вычислительной техники позволяет осуществить жесткую синхронизацию импульсов управления с работой основного генератора, что существенно повьппает стабильность шаговых микроперемещений предметного столика
Формула изобретения
i а Пpeд seтный столик растрового электронного микроскопа, содержащий корпус, механизм вращения и механизмы перемещения по координатам X и Y, снабженные каретками, дисковый объек- тодержатель, ось которого установлена на подшипниках в каретке механизма перемещения по координате X,которая установлена с возможностью линейного перемещения по первой паре шари- ковык направляющих относительно каретки механизма перемещения по координате Y, снабженной второй парой шариковых направляющих, ортогональной первой паре и установленной с возможностью линейного перемещения относительно корпуса, причем механизмы перемещения соединены с приводами, о тличающийся теп, что, с целью повьшеиия эффективности, каждый из приводов выполнен в виде стержневого пьезокерамического элемента с двумя электродами, причем Пс;рвый из элементов установлен на каретке механизма перемещения по координате X, фрикционно соединен с
дисковым объектодержателём и ориентирован в направлении секущей дискового объектодержателя, второй установлен на каретке механизма перемещения по координате Y, фрикционно соединен с кареткой механизма перемещения по координате X и ориентирован вдоль ее направляющих, а третий установлен на корпусе, фрикционно соединен с кареткой механизма перемещения по координате Y и ориентирован вдоль ее направляющих, при этом электроды стержневых пьезокерамических элементов снабжены клеммами для подключения к
.A-XXXX
.; - V j- ..: 1
77 Л
1 3
±±
18
13
20
генератору, прямоугольных электрических импульсов.
(ffuffZ
пП J
г1
п
(риг.З
toCH.
i
а11ллш1Ш1Л1игллплл1гллшш1шлллл1ш
25 JL
/5 ...-.Jr(,
ПЛ
m
(риеЛ
| Предметный столик растрового электронного микроскопа | 1981 |
|
SU1018175A1 |
