Изобретение относится к оборудованию кабельной промышленности, предназначено для выявления повреждений оптических волокон (0В) в оптическом кабеле (ОК) в процессе его прокладки, и может быть использовано для прокладки ОК в грунт при организации волоконно-оптических линий связи и передачи информации,
Известны устройства для прокладки кабелей связи, например прицепной кабеле- укладчик, включающий ходовую опорную
раму, на которой укреплен ножевой рабочий орган и размещенный впереди него дополнительный нож для прорезки растительного слоя, а также кабелеукладчик, включающий тягач с управляемой рычажным механизмом муфтой сцепления, прицеп, на котором установлен отдающий барабан, совмещенный с прицепом рабочий орган ножевого типа с кабеленаправляющей кассетой и средствами контроля натяжения кабеля, датчик давления и электрически связанный с ним электромагнит, который связан с рычажным
о
механизмом управления муфтой сцепления тягача.
Однако указанные устройства приспособлены для прокладки стандартных коаксиальных кабелей и не позволяют контролировать состояние кабеля и своевременно выявлять повреждения в процессе его прокладки.
К прокладке оптического кабеля предъявляются особые требования, поскольку он критичен к изгибам, перекрутке, натяжению, особенно это проявляется на локальных участках при технологически свободной или винтовой укладке волокон, когда входной контроль дефектов не выявляет, и в процессе прокладки это может привести к трещинам, слому оптических волокон, что увеличивает вносимое оптическое затухание в ОК.
Наиболее близким к предлагаемому является устройство для прокладки кабелей, включающее ходовой механизм, сматывающий кабель с барабана и прокладывающий его в траншее, вырытой лемехом, механизм регулировки натяжения кабеля, состоящий из датчика натяжения, блока формирования управляющих сигналов двух гидравлических серводвигателей, устройство вращения барабана.
Хотя указанное устройство и предназначено для прокладки оптического кабеля, но оно также не позволяет контролировать состояние ОК в процессе его прокладки и обнаруживать его повреждения, что приводит к увеличению вносимого оптического затухания, росту экономических затрат, человеческого и технического ресурса при локализации и устранении места повреждения, а также повышению расхода кабеля.
Целью изобретения является повышение качества прокладки оптических кабелей.
Указанная цель достигается тем, что система автоматизированной прокладки оптического кабеля, содержащая транспортное средство, на котором установлен барабан с кабелем, привод барабана и узел регулировки натяжения, включающий датчик натяжения, первый и второй гидравлические серводвигатели и блок формирования сигналов, управляющий работой серводвигателей и привода барабана, она снабжена блоком слежения за состоянием волокон кабеля в процессе прокладки, электромеханической муфтой сцепления, передающим оптическим узлом, закрепленным на барабане и имеющим подвижный электрический соединитель, лазерным передатчиком, направленным
оптическим ответвителем, лавинным фотодетектором, усилителем и оптическим соединителем, соединяющим оптическое волокно кабеля с первым выходом направленного ответвителя, вход которого оптически соединен с входом лавинного фотодетектора, выход которого через усилитель, подвижный электрический соединитель соединен с входом блока слежения за
0 состоянием волокон кабеля, первый выход которого через подвижный электрический соединитель соединен с входом лазерного передатчика, а второй выход соединен с электромеханической муфтой сцепления,
5 при этом блок слежения за состоянием волокон кабеля содержит кварцевый генератор, генератор возбуждающих импульсов, первую - четвертую схемы И, первую и вторую схемы НЕ, схему формирования им0 пульсов, генератор пилообразного напряжения, логарифмический усилитель, блок индикации, пиковый детектор, первый - третий интеграторы, первый - четвертый усилители, первое - третье пороговые уст5 ройства, схему сравнения, линию задержки, схему ИЛИ, триггер, счетчик импульсов, переключатель режима работы, индикатор Авария, причем первый выход кварцевого генератора через генератор возбуждающих
0 импульсов соединен с входом первой схемы НЕ, схемой формирования импульсов и первым выходом блока слежения, выход первой схемы НЕ соединен с вторым входом первой схемы И, выход которой соединен с входом
5 логарифмического усилителя и через пиковый детектор, первый усилитель соединен с первым входом первого порогового устройства, второй вход которого предназначен для установки необходимого уровня сраба0 тывания, а выход соединен с входом линии задержки и вторым входом триггера, выход логарифмического усилителя соединен с третьим входом блока индикации и через первый интегратор с вторым входом схема
5 сравнения, выход схемы формирования импульсов соединен с первым входом триггера и блока индикации и через генератор пилообразного напряжения с вторым входом блока индикации и входом второго интегра0 тора, выход которого соединен с первым входом схемы сравнения, выход которой через второй усилитель соединен с первым входом второго порогового устройства, второй вход которого предназначен для уста5 новки необходимого уровня срабатывания, а выход соединен с вторым входом схемы ИЛИ и вторым входом второй схемы И, выход которой соединен с входом счетчика импульсов, второй выход кварцевого гене- j3aTopa соединен с первым входом четвертой схемы И, второй вход которой соединен с выходом триггера, а выход - с первым входом второй схемы 1/1 и через третий интегратор с первым входом третьего порогового устройства, второй вход которого предназначен для установки необходимого уровня срабатывания, а выход соединен через третий усилитель с входом второй схемы НЕ и второй клеммой переключателя режима работы, выход схемы Н Е через первую клемму переключателя режима работы соединен с вторым входом третьей схемы И, первый вход которой соединен с выходом схемы ИЛИ, первый вход которой соединен с выходом линии задержки, выход третьей схемы И соединен с индикатором Авария и входом четвертого усилителя, выход которого является вторым выходом блока слежения и соединен с входом электромагнитной муфты сцепления.
Сущность изобретения заключается в том, что в 0В из ОК, намотанного на барабан и выходящего через его боковую стенку, через направленный оптический ответви- тель и оптический соединитель, являющийся выходом передающего оптического узла (ПОУ), из лазерного передатчика, запускающегося импульсами генератора возбуждающих импульсов, блока контроля, вводится оптический зондирующий импульс. Рассеянное на неоднородностях структуры 0В, возникающих при повреждениях ОК в процессе его прокладки, оптическое излучение зондирующего импульса принимается блоком слежения за состоянием волокон кабеля (БС), входом которого является первый вход первой схемы И. По форме обратнорас- сеянного оптического зондирующего импульса в БС проводится анализ состояния 0В на предмет появления трещин, изломов, изгибов с радиусом больше критического и в случае выявления какого-то повреждения 0В в БС формируется сигнал на остановку транспортного средства и загорание индикации Авария, причем в БС при этом фиксируется длина проложенного ОК, что позволяет легко локализовать место его повреждения.
Алгоритм идентификации дефектов 0В, возникающих при прокладке ОК, основан на анализе приращения мощности отраженного оптического сигнала от места повреждения 0В относительно мощности ралеевского рассеивания с участка ОВ.где находится повреждение, и за ним.
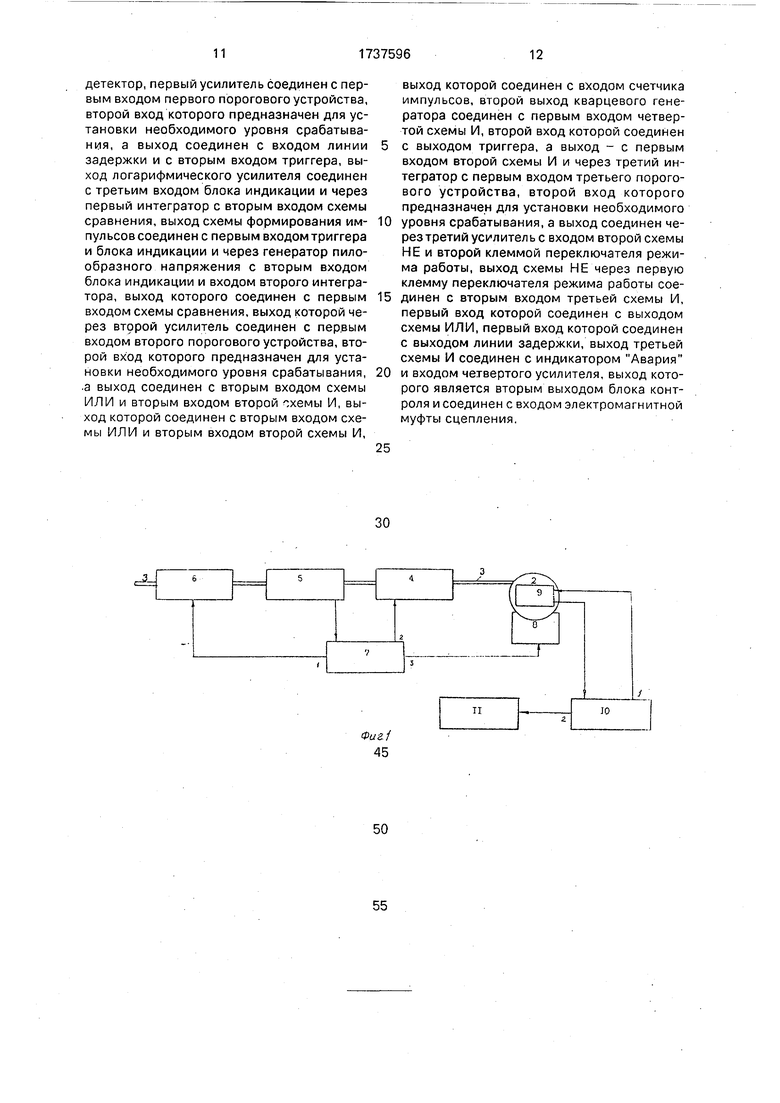
На фиг. 1 показана структурная схема предлагаемой системы; на фиг. 2 - структурная схема оптического передающего узла; на фиг. 3 - структурная схема блока контроля.
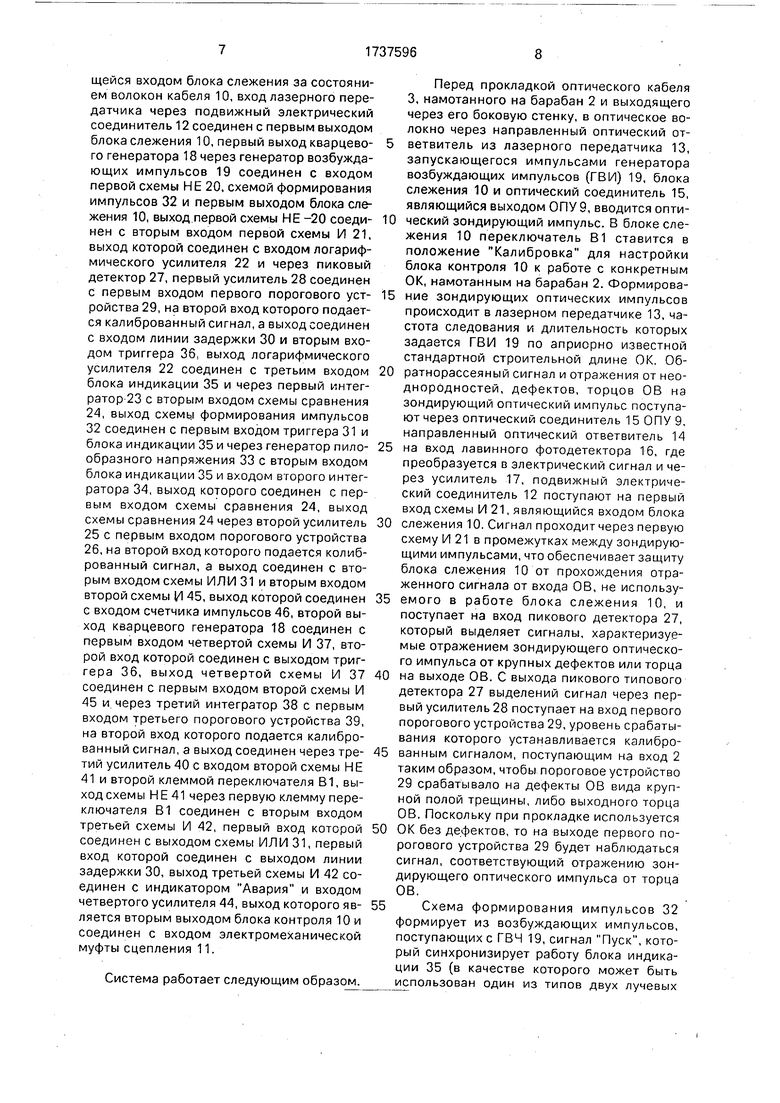
Система содержит транспортное устройство 1, барабан с намотанным оптическим кабелем 3, первый 4 и второй 6 гидравлические серводвигатели, датчик натяжения 5, блок формирования управляющих сигналов 7, устройство вращения барабана 8, оптический передающий узел 9, состоящий из подвижного электрического соединителя 12, лазерного передатчика 13,
0 направленного оптического ответвителя 14, оптического соединителя 15, лавинного фотодетектора 16 и усилителя 17, блок 10 контроля, состоящий из кварцевого генератора 18, генератора возбуждающих импульсов 19,
5 первой 20, второй 41 схемы НЕ, первой 21, второй 45, третьей 42 и четвертой 37 схем И, схемы формирования импульсов 32, генератора пилообразного напряжения 33, логарифмического усилителя 22, блока
0 индикации 35, пикового детектора 27, первого 23, второго 34 и третьего 38 интеграторов, первого 28, второго 25, третьего 40 и четвертого 44 усилителей, первого 29, второго 26 и третьего 30 пороговых устройств,
5 схемы сравнения 24, линии задержки 30, схемы ИЛИ 31, триггера 36, счетчика импульсов 46, переключателя режима работы В1, индикатора Авария 43, электромеханическую муфту сцепления 11.
0Транспортное устройство 1 представляет собой бульдозер с рабочим органом для рытья траншеи, куда будет укладываться оптический кабель 3, намотанный на барабан 2, который закреплен на транспортном уст5 ройстве. ОК 3 сматывается с барабана 2 устройством вращения барабана 8 при движении транспортного устройства 1. Контроль за натяжением ОК 3 в заданных пределах осуществляет датчик натяжения 5,
0 состоящий из пружины и потенциометра, сигнал с которого в зависимости от силы натяжения кабеля 3 подается в блок формирования сигналов 7, который вырабатывает сигнал для управления работой устройства
5 вращения барабана 2 и серводвигателей 4 и 6. Вход оптического волокна из оптического кабеля 3, намотанного на барабане 2 и выходящего через его боковую стенку, через оптический соединитель 15, являющийся
0 оптическим выходом передающего оптического узла 9, и через направленный ответви- тель 14 оптически соединен с выходом лазерного передатчика 13, второй выход направленного оптического ответвителя 14
5 оптически соединен с входом лавинного фотодетектора 16,выход которого через усилитель 17, подвижный электрический соединитель 12, являющийся выходом передающего оптического узла 9, соединен с первым входом первой схемы И 21, являющейся входом блока слежения за состоянием волокон кабеля 10, вход лазерного передатчика через подвижный электрический соединитель 12 соединен с первым выходом блока слежения 10, первый выход кварцевого генератора 18 через генератор возбуждающих импульсов 19 соединен с входом первой схемы НЕ 20, схемой формирования импульсов 32 и первым выходом блока слежения 10, выход первой схемы НЕ -20 соединен с вторым входом первой схемы И 21, выход которой соединен с входом логарифмического усилителя 22 и через пиковый детектор 27, первый усилитель 28 соединен с первым входом первого порогового устройства 29, на второй вход которого подается калиброванный сигнал, а выход соединен с входом линии задержки 30 и вторым входом триггера 36. выход логарифмического усилителя 22 соединен с третьим входом блока индикации 35 и через первый интегратор 23 с вторым входом схемы сравнения 24, выход схемы формирования импульсов 32 соединен с первым входом триггера 31 и блока индикации 35 и через генератор пилообразного напряжения 33 с вторым входом блока индикации 35 и входом в горого интегратора 34, выход которого соединен с первым входом схемы сравнения 24, выход схемы сравнения 24 через второй усилитель 25 с первым входом порогового устройства 26, на второй вход которого подается колиб- рованный сигнал, а выход соединен с вторым входом схемы ИЛИ 31 и вторым входом второй схемы И 45, выход которой соединен с входом счетчика импульсов 46, второй выход кварцевого генератора 18 соединен с первым входом четвертой схемы И 37, второй вход которой соединен с выходом триггера 36, выход четвертой схемы И 37 соединен с первым входом второй схемы И 45 и через третий интегратор 38 с первым входом третьего порогового устройства 39, на второй вход которого подается калиброванный сигнал, а выход соединен через третий усилитель 40 с входом второй схемы НЕ 41 и второй клеммой переключателя В1, выход схемы НЕ 41 через первую клемму переключателя В1 соединен с вторым входом третьей схемы И 42, первый вход которой соединен с выходом схемы ИЛИ 31, первый вход которой соединен с выходом линии задержки 30, выход третьей схемы И 42 соединен с индикатором Авария и входом четвертого усилителя 44, выход которого является вторым выходом блока контроля 10 и соединен с входом электромеханической муфты сцепления 11.
Система работает следующим образом.
Перед прокладкой оптического кабеля 3, намотанного на барабан 2 и выходящего через его боковую стенку, в оптическое волокно через направленный оптический ответвитель из лазерного передатчика 13, запускающегося импульсами генератора возбуждающих импульсов (ГВИ) 19, блока слежения 10 и оптический соединитель 15, являющийся выходом ОПУ 9, вводится опти0 ческий зондирующий импульс. В блоке слежения 10 переключатель В1 ставится в положение Калибровка для настройки блока контроля 10 к работе с конкретным ОК, намотанным на барабан 2. Формирова5 ние зондирующих оптических импульсов происходит в лазерном передатчике 13, частота следования и длительность которых задается ГВИ 19 по априорно известной стандартной строительной длине ОК. 060 ратнорассеяный сигнал и отражения от нео- днородностей, дефектов, торцов 0В на зондирующий оптический импульс поступают через оптический соединитель 15 ОПУ 9, направленный оптический ответвитель 14
5 на вход лавинного фотодетектора 16, где преобразуется в электрический сигнал и через усилитель 17, подвижный электрический соединитель 12 поступают на первый вход схемы И 21, являющийся входом блока
0 слежения 10.Сигнал проходитчерез первую схему И 21 в промежутках между зондирующими импульсами, что обеспечивает защиту блока слежения 10 от прохождения отраженного сигнала от входа 0В, не использу5 емого в работе блока слежения 10, и поступает на вход пикового детектора 27, который выделяет сигналы, характеризуемые отражением зондирующего оптического импульса от крупных дефектов или торца
0 на выходе 0В. С выхода пикового типового детектора 27 выделений сигнал через первый усилитель 28 поступает на вход первого порогового устройства 29, уровень срабатывания которого устанавливается калибро5 ванным сигналом, поступающим на вход 2 таким образом, чтобы пороговое устройство 29 срабатывало на дефекты 0В вида крупной полой трещины, либо выходного торца 0В. Поскольку при прокладке используется
0 ОК без дефектов, то на выходе первого порогового устройства 29 будет наблюдаться сигнал, соответствующий отражению зондирующего оптического импульса от торца 0В.
5 Схема формирования импульсов 32 формирует из возбуждающих импульсов, поступающих с ГВЧ 19, сигнал Пуск, который синхронизирует работу блока индикации 35 (в качестве которого может быть использован один из типов двух лучевых
осциллографов) по входу 1, устанавливает триггер 35 в состояние 1 и запускает генератор пилообразного напряжения (ГПН) 33. В ГП Н 33 форма выходного сигнала по блоку индикации 35 идентична выходному сигналу с логарифмического усилителя 22 для интервала времени, определяемого длиной 0В в ОК.
Сигналы с выходов логарифмического усилителя 22 и ГПН 33 после интегрирования в первом 23 и втором 34 интеграторах соответственно поступают на входы схемы сравнения 24 и после второго усилителя 25 на вход второго порогового устройства 26, на второй вход которого поступает калиброванный сигнал, уровень которого превышает уровень шумов, оцениваемый по блоку индикации 35. В режиме Калибровка сигнал с выхода второго порогового устройства 26 будет появляться через промежуток времени, харакатеризуемый длиной 0В в ОК.
Установка триггера 36 в состояние 1 по сигналу Пуск разрешает прохождение сигнала тактовой частоты кварцевого генератора 18 через четвертую схему И 37. Сигнал тактовой частоты, период следования которого определяет разрешающую способность системы, используется для определения расстояния до дефекта 0В или его конца в счетчике 46, который управляется второй схемой И 45. Кроме того, сигнал тактовой частоты после суммирования в треть- ем интеграторе поступает в третье пороговое устройство, на второй вход которого поступает калиброванный сигнал, уровень которого устанавливается в соответствии с длиной 0В, определяемой в режиме Калибровка по индикатору Авария при наличии сигнала на первом и втором входах третьей схемы И 42.
В режиме Работа, если выявляются сигналы, превышающие пороговые значения на первом пороговом устройстве 29 или втором пороговом устройстве 25, при отсутствии сигнала на третьем пороговом устройстве 39, который инвертируется второй схемой НЕ 41, вырабатывается сигнал Авария третьей схемы И 42, который индицируется индикатором 43 и усиленный четвертым усилителем поступает на электромеханическую муфту 11.
По сравнению с прототипом предлагаемая система автоматизированной прокладки оптического кабеля повышает надежность прокладки ОК, тем самым позволяет экономить материальные, технические и людские ресурсы. Постоянный оптический контроль 0В в ОК при его прокладке позволяет увеличить скорость прокладки, что также ведет к экономии
временных затрат и экономии топлива. Кроме того, предлагаемая система позволяет экономить средства за счет возможности осуществления входного контроля 0В в ОК
перед его прокладкой.
Формула изобретения Система автоматизированной прокладки оптического кабеля, содержащая транспортное средство, на котором установлен
0 барабан с кабелем, привод барабана и узел регулировки натяжения, включающий датчик натяжения, первый и второй гидравлические серводвигатели и блок формирования сигналов, управляющих ра5 ботой серводвигателей и привода барабана, отличающаяся тем, что, с целью повышения качества прокладки, она снабжена блоком слежения за состоянием волокон кабеля в процессе прокладки,
0 электромеханической муфтой сцепления, передающим оптическим узлом, закрепленным на барабане и имеющим подвижный электрический соединитель, лазерным передатчиком, направленным оптическим от5 ветвителем, лавинным фотодетектором, усилителем и оптическим соединителем, соединяющим оптическое волокно кабеля с первым выходом направленного ответвите- ля, вход которого оптически соединен с вы0 ходом лазерного передатчика, а второй выход оптически соединен с входом лавинного фотодетектора, выход которого через усилитель, подвижный электрический соединитель соединен с входом блока контро5 ля, первый выход которого через подвижный электрический соединитель соединен с входом лазерного передатчика, а второй выход соединен с электромеханической муфтой сцепления, при этом блок сле0 жения за состоянием волокон кабеля содержит кварцевый генератор, генератор возбуждающих импульсов, первую - четвертую схемы И, первую и вторую схемы НЕ, схему формирования импульсов, генератор
5 пилообразного напряжения, логарифмический усилитель, блок индикации, пиковый детектор, первый - третий интеграторы, первый - четвертый усилители, первое - третье пороговые устройства, схему сравне0 ния, линию задержки, схему ИЛИ, триггер, счетчик импульсов, переключатель режима работы, индикатор Авария, причем первый выход кварцевого генератора через генератор возбуждающих импульсов
5 соединен с входом первой схемы НЕ, схемой формирования импульсов и первым выводом блока контроля, выход первой схемы НЕ соединен с вторым входом первой схемы И, выход которой соединен с входом логарифмического усилителя и через пиковый
детектор, первый усилитель соединен с первым входом первого порогового устройства, второй вход которого предназначен для установки необходимого уровня срабатывания, а выход соединен с входом линии задержки и с вторым входом триггера, выход логарифмического усилителя соединен с третьим входом блока индикации и через первый интегратор с вторым входом схемы сравнения, выход схемы формирования импульсов соединен с первым входом триггера и блока индикации и через генератор пилообразного напряжения с вторым входом блока индикации и входом второго интегратора, выход которого соединен с первым входом схемы сравнения, выход которой через второй усилитель соединен с первым входом второго порогового устройства, второй вход которого предназначен для установки необходимого уровня срабатывания, .а выход соединен с вторым входом схемы ИЛИ и вторым входом второй схемы И, выход которой соединен с вторым входом схемы ИЛИ и вторым входом второй схемы И,
0
5
0
выход которой соединен с входом счетчика импульсов, второй выход кварцевого генератора соединен с первым входом четвертой схемы И, второй вход которой соединен с выходом триггера, а выход - с первым входом второй схемы И и через третий интегратор с первым входом третьего порогового устройства, второй вход которого предназначен для установки необходимого уровня срабатывания, а выход соединен через третий усилитель с входом второй схемы НЕ и второй клеммой переключателя режима работы, выход схемы НЕ через первую клемму переключателя режима работы соединен с вторым входом третьей схемы И, первый вход которой соединен с выходом схемы ИЛИ, первый вход которой соединен с выходом линии задержки, выход третьей схемы И соединен с индикатором Авария и входом четвертого усилителя, выход которого является вторым выходом блока контроля и соединен с входом электромагнитной муфты сцепления.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перемотки оптического волокна | 1988 |
|
SU1645867A1 |
| Устройство для обнаружения места дефекта оптического кабеля | 1989 |
|
SU1684750A1 |
| Способ ультразвукового контроля изделий и устройство для его осуществления | 1990 |
|
SU1727050A1 |
| Измеритель метеорологической дальности видимости | 1990 |
|
SU1784843A1 |
| СТАНЦИЯ РАДИОЭЛЕКТРОННОЙ РАЗВЕДКИ И ПОДАВЛЕНИЯ | 1998 |
|
RU2150178C1 |
| Устройство для измерения скорости ультразвука в жидкости | 1984 |
|
SU1260688A1 |
| Устройство для измерения расстояния до места повреждения линий электропередачи | 2017 |
|
RU2654958C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ОПТИЧЕСКИХ ВОЛОКОН И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2546718C1 |
| СИГНАЛИЗАТОР ОБЛЕДЕНЕНИЯ | 2022 |
|
RU2791724C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА ПОВРЕЖДЕНИЯ КАБЕЛЯ ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧИ И СВЯЗИ С ПОМОЩЬЮ МЕТОДА МАРКЕРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2215298C2 |
Изобретение относится к оборудованию кабельной промышленности. Цель изобретения - повышение качества прокладки оптических кабелей. В оптическое волокно кабеля, намотанного на барабан и выходящего через его боковую стенку, через направленный оптический ответвительи оптический соединитель, являющийся выходом передающего оптического узла, из лазерного передатчика, запускающегося импульсами генератора возбуждающих импульсов блока контроля, вводится оптический зондирующий импульс. Рассеянное на неоднородностях структуры оптического волокна, возникших при повреждениях кабеля в процессе его прокладки, оптическое излучение зондирующего импульса принимается блоком слежения за состоянием волокон кабеля, входом которого является первый вход первой системы И. По форме обратно- рассеянного оптического зондирующего импульса в блоке слежения проводится анализ состояния волокон на предмет появления повреждений и в случае их наличия в блоке сложения формируется сигнал на остановку транспортного средства 3 ил (Л Х| СО х|
| Прицепной кабелеукладчик | 1977 |
|
SU630692A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Штамм актиномицета Streptomyces tsukubensis -продуцент такролимуса и способ получения такролимуса | 2019 |
|
RU2722699C1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Борисов К,В | |||
| Методы идентификации и локализации дефектов световодов в оптических кабелях | |||
| Шланговое соединение | 0 |
|
SU88A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
