-5
Ј
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля дефектности полупроводниковых пластин и структур | 1990 |
|
SU1785054A1 |
| АДАПТИВНЫЙ ЛАЗЕРНЫЙ ДОПЛЕРОВСКИЙ ЛОКАТОР | 1990 |
|
RU2012013C1 |
| ЛАЗЕРНЫЙ ИМПУЛЬСНЫЙ ДАЛЬНОМЕР | 2014 |
|
RU2551700C1 |
| Метеорологическая радиолокационная станция | 1982 |
|
SU1058444A1 |
| НАКОПИТЕЛЬ ИНФОРМАЦИИ НА ОПТИЧЕСКОМ ДИСКЕ | 2006 |
|
RU2316060C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ ФОКУСИРОВКИ ИЗЛУЧЕНИЯ | 1991 |
|
RU2035772C1 |
| Цифровое устройство селекции движущихся целей | 1984 |
|
SU1841294A1 |
| ЛАЗЕРНАЯ СИСТЕМА ТЕЛЕОРИЕНТАЦИИ С КАНАЛОМ ОПТИЧЕСКОЙ ОБРАТНОЙ СВЯЗИ (ВАРИАНТЫ) | 2009 |
|
RU2410722C1 |
| Цифровой фильтр | 1986 |
|
SU1387174A1 |
| СТЕРЕОСКОПИЧЕСКИЙ КОГЕРЕНТНЫЙ ДОПЛЕРОВСКИЙ ЛОКАТОР | 2016 |
|
RU2627550C1 |
Использование: оптико-электронное приборостроение, метеорологии и навигации. Сущность изобретения: устройство содержит лазер с блоком управления, приемо-передающую оптическую систему, датчик опорного импульса, оптически сопряженный с лазером, счетчик, генератор счетных импульсов, запускающий счетчик, три схемы сравнения кодов, три регистра памяти, фотоприемное устройство, оптически сопряженное с приемопередающей оптической системой, логарифмический усилитель и на выходе фотоприемного устройства, два управляемых интегратора, два блока памяти, запоминающие выходные сигналы управляемых интеграторов, схему- вычитания, три цифроаналоговых преобразователя ЦАП на выходах соответствующих регистров памяти, три логарифмических усилителя, подключенных к выходу соответствующих ЦАП, квадратор, подключенный к выходу схемы вычитания, два сумматора, два интегратора, пять перемножителей, аналого-цифровой преобразователь и источник эталонного сигнала. 1 ил.
х|
CD
Јь 00
СО
Изобретение относится к оптико-электронному приборостроению и может быть использовано в метеорологии и навигации. Известен прибор для измерения оптической прозрачности по заявке ФРГ № 3309838, G 01 N 21/59, 1984, содержащий последовательно соединенные источник света и передающую оптическую систему, отражатель, оптически сопряженный с передающей оптиче ской системой, последо- вательно соединенные приемную оптическую систему, сопряженную с отражателем, фотоприемник и блок электронной обработки. Недостатки известного устройства вытекают из необходимости использо- вания в нем отражателя. Такими недостатками являются: громоздкость конструкции, ограниченный диапазон применения, продолжительное еремя подготовительных работ, связанное с уста- новкой отражателя и ориентацией приемопередающего устройства в направлении на отражатель.
Известно устройство для определения прозрачности оптической среды, взятое в качестве прототипа, по авторскому свидетельству СССР № 1404837, G 01Л/04, 1987, содержащее последовательно соединенные задающий генератор, источник излучения, передающую оптическую систему и два уголковых отражателя, установленные на границах исследуемого участка оптической среды, последовательно соединенные приемную оптическую систему, оптически сопряженную с уголковыми отражателями, фотоприемник и коммутатор, к выходам которого подключены два интегратора, а также схему деления, подключенную входами к выходам интеграторов, и линию задержки, подключенную к управляющим входам обоих интеграторов.
Наличие уголковых отражателей в прототипе приводит к громоздкости конструкции, ограниченному диапазону высот применения, продолжительности подготовительных работ, связанной с установкой отражателей на заданные расстояния и ориентацией приемо-передающего устройства в направлении на отражатели.
Целью изобретения является упрощение конструкции, связанное с исключением из устройства уголковых отражателей.
Поставленная цель достигается тем, что в устройство, содержащее последовательно соединенные лазер с блоком управления и передающую оптическую систему, последо- вательно соединенные приемную оптическую систему и фотоприемник, введены соответствующие блоки и узлы, позволяющие по изменению мощности обратного
5 10 15 20
25 OQ «,-
0
рассеяния оценить метеорологическую дальность видимости. В основу работы устройства поданному изобретению положено уравнение лазерной локации рассеивающей среды, которое для горизонтальной трассы принимает вид:
P(D)P0ABX /п 7пР а ехр( - 2е D)/D2,
0)
где P(D) - мощность принимаемого импульсного сигнала однократного рассеяния с расстояния D от лазера;
Ро - мощность зондирующего импульсного излучения лазера;
Авх - площадь входного зрачка приемного устройства;
С - скорость саета;
ги - длительность импульса излучения;
7п, /пр - коэффициенты пропускания оптических систем передатчика и приемника соответственно;
а- показатель рассеяния;
Х модуль вектора индикатрисы рассеяния для угла 180°;
Ј -аЛ-а - показатель ослабления;
а - показатель поглощения лазерного излучения в атмосфере.
Так как текущая дальность D связана со временем t соотношением:
,(2)
то уравнение (1) можно преобразовать к виду:
т
PfrHPoAex 1 tin Ппр0-Х ( ectXt2,
(3)
Сигнал S(t) на выходе фотоприемника с интегральной чувствительностью у описывается выражением:
где: к
5(гНг exp(-ect), ги
(4)
2Р0 У Авх f - пр-а-я.
Логарифмическое преобразование выражения (4) дает
nS(t) - Ink - 2lnt - cct.(5)
Если отсчеты информационного сигнала (5) брать не в отдельные моменты времени, а в отдельные интервалы (ti, 12) и (ta, ts), то полученные отсчеты будут усреднены, что вызывает снижение флуктуационной составляющей и повышение точности. Отсчеты И и J2 в интервалы (ti, t2) и (ta, ta) характеризуются соотношениями:
11- JIJlnS(t)dt С1 t1)lnK + + 2(t2 - И -12 Int2 + tt Inti) - (IS - 3),
12 /$nS(t)dt (to - ta) InK +
+ 2(t3-t2 -t3lnt3+t2lnt2)-(e-ti),
Если длительность интервалов t2 - ti - -ta -12 Ati, то разность сигналов:
И -12 - e с(Дif + 2tilnti + - 4tzlnt2. (8)
Известно, что метеорологическая дальность видимости Ом определяется как расстояние, на котором стандартный наблюдатель в условиях достаточной освещенности может еще различить объект достаточных размеров, контраст которого относительно фона равен единице. Под стандартным наблюдением подразумевается наблюдатель, способный воспринимать изображение с некоторым минимальным контрастом Ко. Значение DM для горизонтальной трассы может быть найдено из уравнения:
DM ln(1/Ko)/e.(9)
Обычно контраст задают равным 0,02.
Таким образом, определив из (8) значение Ј , из выражения (9) можно найти метеорологическую дальность видимости Ом. Описанный алгоритм реализован в предложенном устройстве.
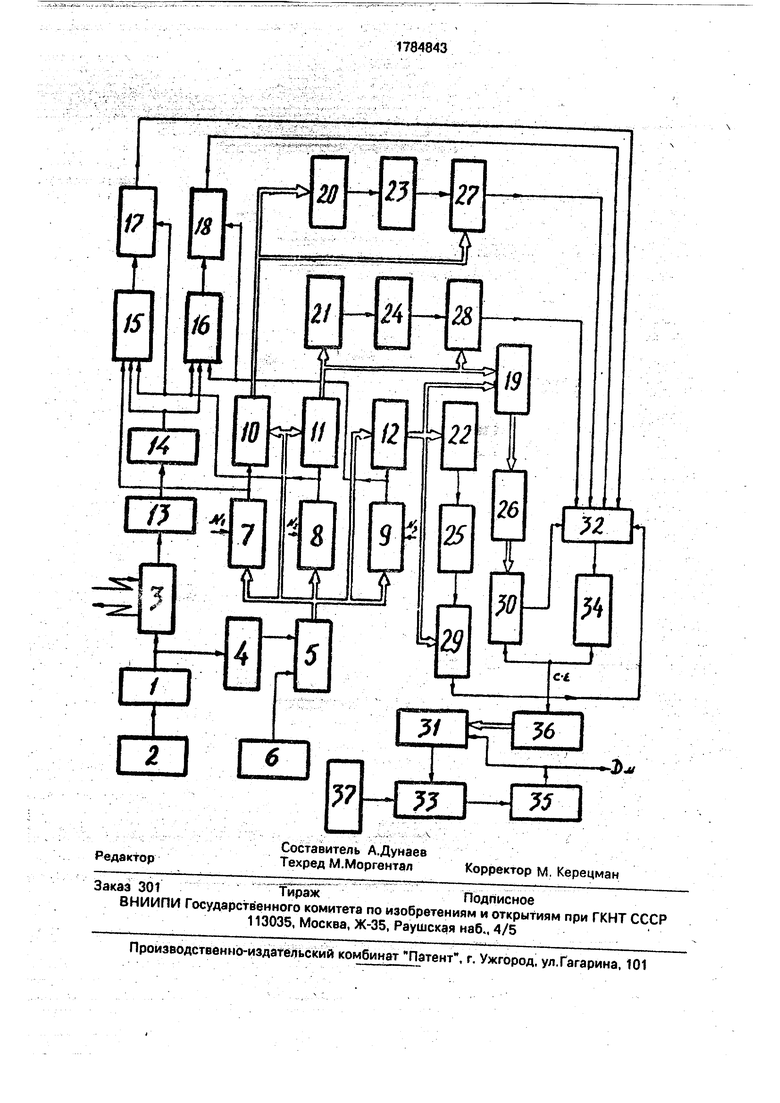
На чертеже приведена функциональная схема измерителя метеорологической дальности видимости.
Устройство содержит лазер 1 с блоком 2 управления, приемо-передающую оптическую систему 3. датчик 4 опорного импульса, оптически сопряженный с лазером, счетчик 5, обнуление которого осуществляется импульсами датчика 4, генератор счетных импульсов б, запускающий счетчик 5, три схемы 7, 8 и 9 сравнения кодов, три регистра 10,11 и 12 памяти, фотоприемное устройство 13, оптически сопряженное с приемной оптической системой, логарифмический усилитель 14, преобразующий выходной сигнал фотоприемного устройства 13, два управляемых интегратора 15 и 16, два блока 17 и 18 памяти, запоминающие в заданные моменты времени выходные сигналы управляемых интеграторов 15 и 16, схему вычитания 19. три цифрозналоговых преобразователя 20, 21 и 22, преобразующие выходные сигналы регистров памяти 10, 11 и 12 соответственно, три логарифмических усилителя 23,24 и 25, подключенные к выходу соответствующих цифроаналого- вых преобразователей 20. 21 и 22, квадратор 26, подключенный к выходу схемы вычитания 19, пять перемножителей 27,28, 29, 30 и 31, два сумматора 32 и 33. два интегратора 34 м 35, аналого-цифровой преобразователь 36 и источник 37 эталонного сигнала.
Устройство работает следующим образом. Лазер 1 под воздействием импульса 5 поджига, сформированного в блоке управления 2, вырабатывает оптический импульс, который через приемо-передающую оптическую систему 3 излучается в атмосферу по горизонтальной трассе. В момент излуче10 ния лазера 1 датчик 4 формирует опорный импульс, который обнуляет счетчик 5. Счетные импульсы, выработанные генератором 6, подаются на счетный вход счетчика 5 и изменяют его состояние. Текущий цифро15 вой код, выработанный счетчиком 5 и несущий информацию о времени с момента излучения лазером оптического импульса, одновременно подается на три схемы сравнения кодов 7,8 и 9 и на три регистра памяти
0 10, 11 и 12.
Оптическое излучение обратного рассеяния через приемо-передающую оптическую систему 3 поступает на фотоприемное устройство 13, в котором преобразуется в
5 электрический сигнал (4). Логарифмический усилитель 14 преобразует сигнал S(t) к виду (5).
Пусть ti - момент времени после излучения оптического импульса соответствует
0 цифровому коду Ni, tz - момент времени после излучения оптического импульса соответствует цифровому коду N2, a ta - момент времени после излучения оптического импульса соответствует цифровому коду N3. Тогда в момент времени ti схема 7 сравне5 ния кодов вырабатывает импульсы одновременно поступающий на управляющий вход регистра 10 памяти и на первый управляющий вход управляемого интегратора 15. По этому сигналу в регистр 10 запишется
цифровой код, соответствующий моменту времени ti, а управляемый интегратор 15 будет интегрировать выходной сигнал логарифмического усилителя 14. По истечении некоторого времени At цифровой код,
5 сформированный счетчиком 5, будет совпадать с цифровым кодом N2. В момент совпадения кодов схема 8 вырабатывает импульс сравнения, по которому в регистр 11 заносится цифровой код, соответствующий мо0 менту времени t2 после получения оптического импульса, а управляемый интегратор 15 закончит интегрирование информационного сигнала. Поступление выходного сигнала на управляющий вход
5 блока 17 памяти приведет к тому, что в нем будет содержаться сигнал И (формула 6). выработанный в интеграторе 15.
Поступление же этого сигнала на первый управляющий вход управляемого интегратора 16 приведет к тому, что с момента времени ta интегратор 16 будет интегрировать выходной сигнал логарифмического усилителя 14.
По истечении времени 2 At цифровой код, сформированный счетчиком 5, будет совпадать с цифровым кодом Мз, соответствующим моменту времени ta. В момент совпадения кодов схема 9 вырабатывает импульс, по которому интегратор 16 закон- чит интегрирование информационного сигнала, а в регистр 12 будет занесен цифровой код, соответствующий моменту ta после излучения оптического импульса. Поступление выходного сигнала схемы сравнения 9 на управляющий вход блока памяти 18 приведет к запоминанию в нем сигнала h (формула 7), выработанного в управляемом интеграторе 16. В основу построения управ- ляемого интегратора положено, например, использование операционного усилителя, во входной цепи которого включены резистор и электронный ключ, а в цепи обратной связи - конденсатор. Управление электронным ключом осуществляется выходными импульсами схемы сравнения кодов. В качестве блоков памяти 17 и 18 могут использоваться устройства выборки-хранения.
Цифровые коды, снимаемые с регистров 10,11 и 12 в цифроаналоговых преобра- зователях преобразуются в аналоговые сигналы, которые затем поступают в логарифмические усилители 23, 24 и 25 соответ- ственно. Коэффициенты усиления усилителей 23 и 25 в два раза больше коэффициента усиления логарифмического усилителя 14, а коэффициент усиления логарифмического усилителя 24 - в четыре раза. Сигналы, сформированные логарифмическими усилителями 23, 24 и 25, поступают на перемножители 27, 28 и 29 соответственно. На другой вход этих перемножителей подаются сигналы с соответствующих регистров памяти 10, 11 и 12. Выходные сигналы перемножителей 27, 28 и 29 вместе с сигналами, содержащимися в блоках памяти 17 и 18, поступают на сумматор 32, где осуществляется их алгебраическое суммирование в соответствии с формулой:
Ui - h - 2 - 2tilnti + 4tafnt2 - 2тз1птз - -ec(Atf(10)
Цифровые коды, снимаемые с регистров 11 и 12, поступают также на схему вычитания 19, где вырабатывается их разность At -13 -12 t2 - ti. Найденное значение At подается на квадратор 26, а затем поступает на первый вход перемножителя 30, на второй вход которого подается напряжение об
5 0 5 0 5
0 5
0
5
5
ратной связи Doc. Перемножитель 30, сумматор 32 и интегратор 34 входят в состав контура автоматического регулирования. Поэтому сигнал рассогласования, являющийся выходным сигналом сумматора 32, отрабатывается этим контуром. При значении сигнала рассогласования, равном нулю, напряжение Uoc на выходе интегратора 34 будет иметь некоторое постоянное значение, после умножения которого в перемножителе 30 на (Atf получится сигнал, соответствующий значению U. Следовательно, после отработки сигнала рассогласования имеет место соотношение:
Ul Uoc(At)2,
из которого следует:
Uoc Ui(Atr.
(11)
Сопоставляя соотношения (11) и (10). заключаем, что
Uoc-C-e.(12)
Выработанное напряжение обратной связи, пропорциональное показателю ослабления, в аналого-цифровом преобразователе 36 преобразуется в цифровую форму и поступает на первый вход перемножителя 31, на другой вход которого подается сигнал Ub. Перемножитель 31, сумматор 33 и интегратор 35 входят в состав контура автоматического регулирования. Поэтому сигнал рассогласования, являющийся выходным сигналом сумматора 33, где выходной сигнал перемножителя 31 сравнивается с эталонным сигналом с-1п(1/Ко), выработанным источником 37, отрабатывается этим контуром. При значении сигнала рассогласования, равном нулю, напряжение UD на выходе интегратора 35 будет иметь некоторое постоянное значение, после умножения которого в перемножителе 31 на сигнал с Е. получится сигнал, соответствующий эталонному значению с -1л(1 /Ко).
Следовательно, после отработки сигнала рассогласования имеем:
с -InO/Ко)-UD , из которого следует:
UD ln(1/K0)/e.
то есть совпадает с формулой (9) и означает, что сигнал UD соответствует метеорологической дальности видимости.
Заметим, что перемножители 27,28,29, 30 и 31 могут быть выполнены на основе использования цифроаналогового преобразователя. - Из изложенного следует, что для работы предложенного устройства не нужны уголковые отражатели. А это значит, что предложенное техническое решение будет иметь более компактное конструктивное решение и содержать приемо-передающее устройство с блоком электроники, выполняющей указанные выше функции. Вместе с тем предложенное устройство может измерять метеорологическую дальность видимости по горизонтальной трассе в широком диапазоне высот и требует значительного сокращения подготовительных работ. Формула изобретения Измеритель метеорологической дальности видимости, содержащий лазер с блоком управления, оптически сопряженный с приемо-передающей оптической системой и датчиком опорного импульса, фотоприемное устройство, оптически сопряженное с приемо-передающей оптической системой, и два интегратора, отличающийся тем, что, с целью упрощения конструкции, в измеритель дополнительно введены два управляемых интегратора, два блока памяти, каждый из которых подключен к выходу соответствующего управляемого интегратора, два сумматора, источник эталонного сигнала, последовательно соединенные генератор счетных импульсов и счетчик, установочный вход которого соединен с выходом датчика опорного импульса, три параллельные цепи последовательно соединенных регистра памяти, цифроана- логового преобразователя, логарифмического усилителя и перемножителя, второй вход которого подключен к выходу соответствующего регистра памяти, а выход - к соответствующему входу первого сумматора, четвертый логарифмический усилитель, подключенный входом к выходу фотоприемного устройства, а выходом - к информационным входам управляемых интеграторов,
0
5
три схемы сравнения кодов, каждая из которых подключена входом к выходу счетчика, а выходом - к управляющему входу соответствующего регистра памяти, каждый из которых подключен информационным входом к выходу счетчика, причем выход первой схемы сравнения подключен к первому управляющему входу первого управляемого интегратора, выход второй схемы сравнения подключен к второму управляющему входу первого управляемого интегратора, к первому управляющему входу второго управляемого интегратора и к управляющему входу первого блока памяти, выход третьей схемы сравнения подключен к второму входу второго управляемого интегратора и к управляющему входу второго блока памяти, последовательно соединенные схема вычитания, два входа которой подключены к вы- 0 ходам второго и третьего регистров памяти, квадратор и четвертый перемножитель, подключенный к четвертому входу первого сумматора, пятый и шестой входы которого соединены с выходами блоков памяти, а выход - с входом первого интегратора, подключенного выходом к второму входу четвертого перемножителя, последовательно соединенные аналого-цифровой преобразователь, подключенный входом к выходу первого интегратора, и пятый перемножитель, выход которого соединен с входом второго сумматора, второй вход которого соединен с выходом источника эталонного сигнала, а выход - с входом второго интегратора, выход которого является выходом измерителя и подключен к второму входу пятого перемножения.
5
0
5
я
