Изобретение относится к электротехнике и может использоваться для эксперимен- тального определения индуктивных сопротивлений рассеяния фаз обмоток статора и ротора асинхронных машин.
Целью изобретения является повышение точности определения индуктивного сопротивления рассеяния обмотки статора Xi и определения приведенного индуктивного
сопротивления рассеяния обмотки ротора Х2 асинхронных машин.
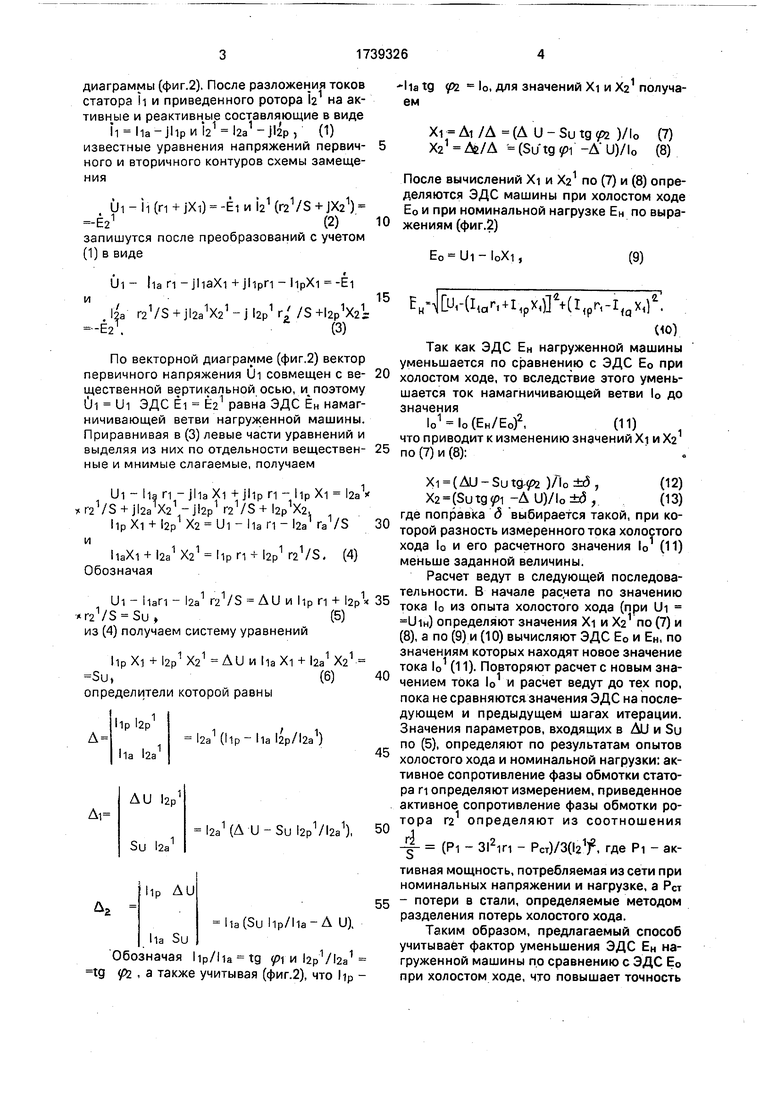
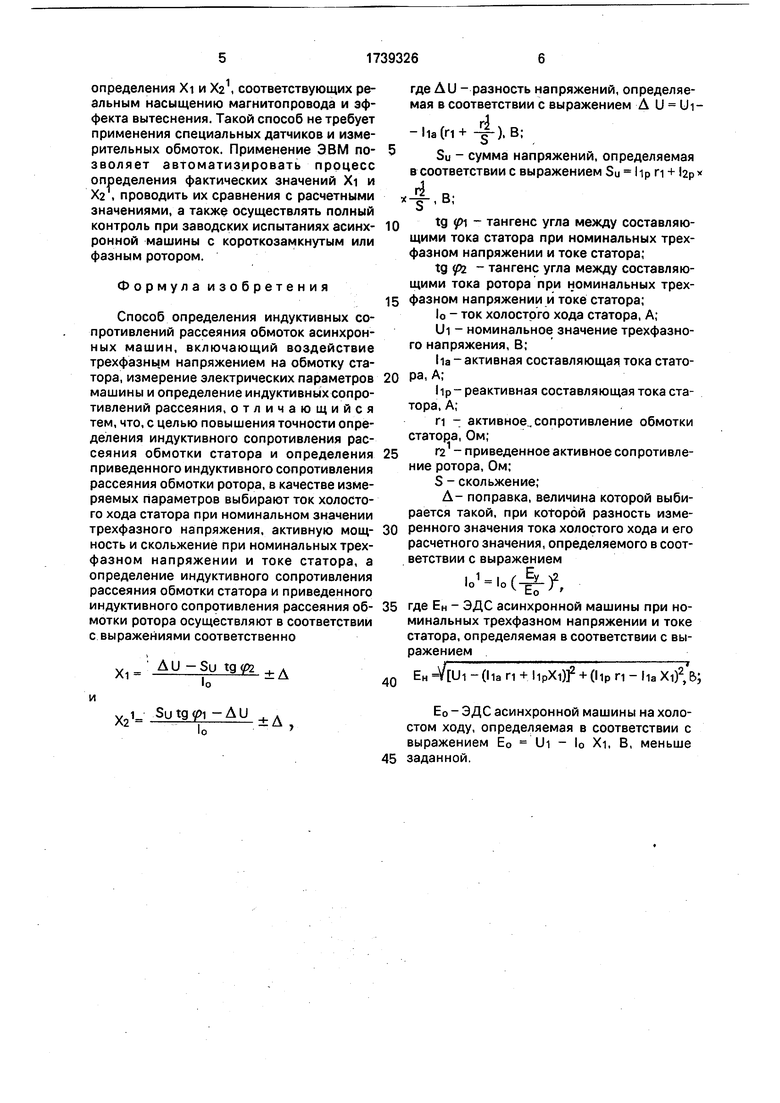
На фиг,1 показана Т-образная схема замещения асинхронной машины; на фиг,2 - векторная диаграмма, соответствующая указанной схеме замещения.
Обоснование предлагаемого способа определения Xi и Х2 следует из рассмотрения схемы замещения (фиг.1) и векторной
диаграммы (фиг.2). После разложения токов статора h и приведенного ротора Ь на активные и реактивные составляющие в виде
il lla-jhpni21 l2a -jl2p, (1)
известные уравнения напряжений первич- ного и вторичного контуров схемы замещения
Ui - Si (n + jXi) -Ё1 и I21 (r21/S + JX21) -Ё21(2)
запишутся после преобразований с учетом (1) в виде
ill- da ri -jhaXi +jlipn -hpXi -Ei и
l2a r21/S + jl2a1X21-j l2p1 r /S
c-iA™
-Ј2 .
(3)
По векторной диаграмме (фиг.2) вектор первичного напряжения Ui совмещен с ве- 20 щественной вертикальной осью, и поэтому Ui Ui ЭДС Ё1 Ё21 равна ЭДС Ен намагничивающей ветви нагруженной машины. Приравнивая в (3) левые части уравнений и выделяя из них по отдельности веществен- 25 ные и мнимые слагаемые, получаем
Ui - ha П - jha Xl + jhp П - lip Xl l2a1 r21/S + jl2aTX21-jl2P1r21/S+l2p1X2. .
lip Xl + l2p1 X2 Ui - Иа П - l2a raVS 30 И
llaXl + l2a1 X21 hp П + l2p1 ttVS. (4)
Обозначая
Ui - ИаП - l2a1 T21/S AU И lip П + I2p1 35
r21/S Su,(5)
из (4) получаем систему уравнений
1 v 1
1 v-1
hpXl + |2p X2 AU И haXl + l2a X2 Su,(6)40
определители которой равны
Д
Ilpl2p1
lla l2a
l2a1(llp-llal2p/l2a1)
Ai
AU l2p1
Su l2a
l2a1(A U-Sul2PYI2a1), 50
hp AU
ha(SuhP/ha-A U).
ha Su
Обозначая hp/ha tg и tepVtea1 tg де , а также учитывая (фиг.2), что Нр ha tg pz lo, для значений Xi и Х21 получаем
Xi Ai /Д (A U - Su tg (pi )/|0 (7) Х21 Д$/Д (SutgyJi -Д и) (8)
После вычислений Xi и Х21 по (7) и (8) определяются ЭДС машины при холостом ходе Ео и при номинальной нагрузке Ен по выражениям (фиг.2)
E0 Ui-l0Xi,
(9)
5
0 5
0
5
0
5
0
5
EH-uMlia . + I,pXiaS(l(prf-i Qx1)a.
«0)
Так как ЭДС Ен нагруженной машины уменьшается по сравнению с ЭДС Е0 при холостом ходе, то вследствие этого уменьшается ток намагничивающей ветви )0 до значения
101 1о(Ен/Е0)2,(11)
что приводит к изменению значений Xi и Х2 по (7) и (8):
Xi (AU-Sut 0fc )Ло±3,(12)
X2 ( -Д U)/lo ,(13)
где поправка д выбирается такой, при которой разность измеренного тока холостого хода IQ и его расчетного значения 10 (11) меньше заданной величины.
Расчет ведут в следующей последовательности. В начале расчета по значению тока 10 из опыта холостого хода (при Ui UiH) определяют значения Xi и Х21 по (7) и (8), а по (9) и (10) вычисляют ЭДС Е0 и Ен, по значениям которых находят новое значение тока 101 (11). Повторяют расчет с новым значением тока 1о1 и расчет ведут до тех пор, пока не сравняются значения ЭДС на последующем и предыдущем шагах итерации. Значения параметров, входящих в AU и Su по (5), определяют по результатам опытов холостого хода и номинальной нагрузки: активное сопротивление фазы обмотки статора п определяют измерением, приведенное активное сопротивление фазы обмотки ротора Г21 определяют из соотношения
-§- (Pi - 3121П - PCT)/3(l21f, где Pi - активная мощность, потребляемая из сети при номинальных напряжении и нагрузке, а РСт - потери в стали, определяемые методом разделения потерь холостого хода.
Таким образом, предлагаемый способ учитывает фактор уменьшения ЭДС Ен нагруженной машины по сравнению с ЭДС Е0 при холостом ходе, что повышает точность
определения Xi и Х21, соответствующих реальным насыщению магнитопровода и эффекта вытеснения. Такой способ не требует применения специальных датчиков и измерительных обмоток. Применение ЭВМ позволяет автоматизировать процесс определения фактических значений Xi и Хз , проводить их сравнения с расчетными значениями, а также осуществлять полный контроль при заводских испытаниях асинхронной машины с короткозамкнутым или фазным ротором.
Формула изобретения
Способ определения индуктивных сопротивлений рассеяния обмоток асинхронных машин, включающий воздействие трехфазным напряжением на обмотку статора, измерение электрических параметров машины и определение индуктивных сопротивлений рассеяния, отличающийся тем, что, с целью повышения точности определения индуктивного сопротивления рассеяния обмотки статора и определения приведенного индуктивного сопротивления рассеяния обмотки ротора, в качестве измеряемых параметров выбирают ток холостого хода статора при номинальном значении трехфазного напряжения, активную мощность и скольжение при номинальных трехфазном напряжении и токе статора, а определение индуктивного сопротивления рассеяния обмотки статора и приведенного индуктивного сопротивления рассеяния обмотки ротора осуществляют в соответствии с выражениями соответственно
А Ц - Su tg Р2 ± д
о
Su tg ц - A U Л и-
где AU - разность напряжений, определяемая в соответствии с выражением A U Uid-Иа(п + -Ј-), В;
°
Su - сумма напряжений, определяемая в соответствии с выражением Su Ир п + lap
. в.
tg p - тангенс угла между составляющими тока статора при номинальных трехфазном напряжении и токе статора;
tg (pi тангенс угла между составляющими тока ротора при номинальных трех- фазном напряжении и токе статора;
lo - ток холостого хода статора, А;
Ui - номинальное значение трехфазного напряжения, В;
ha -активная составляющая тока статоРа А
Ир - реактивная составляющая тока статора, А;
п - активное,сопротивление обмотки статора, Ом;
га -приведенное активное сопротивление ротора, Ом; S - скольжение;
А- поправка, величина которой выбирается такой, при которой разность изме- ренного значения тока холостого хода и его расчетного значения, определяемого в соответствии с выражением
- - «(-й-)2.
где Ен - ЭДС асинхронной машины при номинальных трехфазном напряжении и токе статора, определяемая в соответствии с выражением
Ен -VtUi-Olan-HipXijf + Olpn - И.
ЕО - ЭДС асинхронной машины на холостом ходу, определяемая в соответствии с выражением Е0 LH - I0 XL В, меньше 45 заданной.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения частотной характеристики проводимости асинхронной машины | 1990 |
|
SU1780062A1 |
| Способ измерения индуктивного сопро-ТиВлЕНия РАССЕяНия МНОгОфАзНОй ОбМОТ-Ки CTATOPA СиНХРОННОй МАшиНы | 1978 |
|
SU817878A1 |
| Способ определения индуктивных сопротивлений рассеяния обмоток трехфазной синхронной машины | 1985 |
|
SU1343364A1 |
| Способ измерения индуктивности рассеяния обмотки статора синхронной машины | 1985 |
|
SU1330591A1 |
| Способ определения активных и индуктивных сопротивлений рассеяния обмотки ротора асинхронного двигателя | 1986 |
|
SU1372259A1 |
| Способ параметрического управления асинхронным короткозамкнутым электродвигателем с вентиляторной нагрузкой и устройство для его осуществления | 1989 |
|
SU1697250A1 |
| Способ определения крутящего момента на роторе буровой установки | 1989 |
|
SU1760398A1 |
| Способ косвенного контроля неравномерности воздушного зазора асинхронного двигателя | 1984 |
|
SU1168878A1 |
| Способ косвенного контроля неравномерности воздушного зазора асинхронного двигателя | 1980 |
|
SU900226A1 |
| Способ определения индуктивного сопротивления рассеяния обмотки статора синхронной машины | 1990 |
|
SU1810849A1 |
Изобретение относится к электроизмерительной технике и может быть использовано для определения индуктивных сопротивлений рассеяния обмоток асинхронных машин. Цель изобретения - повышение точности определения индуктивного сопротивления рассеяния обмотки статора и определение приведенного индуктивного сопротивления рассеяния обмотки ротора. Для осуществления предлагаемого способа на статорные обмотки машины воздействуют переменным напряжением и измеряют несколько значений тока статора и активной мощности на холостом ходу при различных значениях переменного напряжения, при номинальных значениях переменного напряжения и токе статора измеряют активную мощность и скольжение, а индуктивное сопротивление рассеяния обмотки статора и приведенное индуктивное сопротивление рассеяния обмотки ротора определяют в соответствии с выражениями соответственно: Xi AU - Sytg р2} /lo± А и Х21 (S tg (p - -AU)/lo ± А, где AU Ui - Иа (п + г2 YS) и Su Ир п + l2p Г213, а поправка Двыбира- ется такой, при которой разность измеренного значения тока холостого хода и его расчетного значения, определяемого в соответствии с выражением 101 lo(EH/E0)2, меньше заданной, причем ЭДС машины при номинальных переменном напряжении и токе статора Ен определяется в соответствии с выражением Ен - ha П + hp Xi)r+ + (Ир П - На Xi) ЭДС холостого хода Е0 машины определяется в соответствии с выражением ЕО 1Н - 10 XL Подставляя каждый раз в выражения для индуктивных сопротивлений рассеяния вновь полученное расчетное значение тока холостого хода, определяют индуктивные сопротивления рассеяния с требуемой точностью. 2 ил. (Л VJ со ю (л hO ON
Фм г 2оа п hp
Фаг.
-J
Фиг. 2
| Электротехника, 1982, № 3, с.40-41 | |||
| Способ определения индуктивного сопротивления рассеяния обмотки статора электрической машины | 1975 |
|
SU565353A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
