Изобретение относится- к силоизмери- тельной технике и может быть использовано для измерения крувтящего момента на роторе буровой установки нефтяных и газовых скважин.
Известен способ определения крутящего момента, согласно которому производят измерение момента на валу асинхронного короткозамкнутого электродвигателя путем его вычисления по значению напряжения и тока и параметрам электродвигателя 1.
Недостатком данного способа является то, что для вычисления момента на валу электродвигателя необходимо знать значение активных и реактивных сопротивлений статора и реактивных сопротивлений статора и ротора, которые различны даже для одной марки каждого электродвигателя. Кроме того, эти параметры изменяются в процессе работы электродвигателя в зависимости от температуры. Все это приводит к невысокой точности измерения.
Известен способ измерения момента погружного электродвигателя, в котором измерение момента производят по величине механической скорости проходки 2,
Недостатком данного способа является низкая точность, обусловленная необходимостью вводить коэффициенты, учитывающие потери в токопроводе и двигателе, величина которых изменяется, соответственно от длины токопровода и температуры работающего двигателя. Кроме того, при моментах, близких к максимальному, для любого типа электродвигателя линейная зависимость между активной мощностью, оборотами и моментом нарушается из-за перераспределения активных и реактивных мощностей в электродвигателе, что приводит к дополнительной погрешности измереА ния момента.
Из известных способов наиболее близким к предлагаемому является техническое решение на способ определения крутящего момента на роторе буровой установки. Сосл
о о
GO ЧЭ 00
ние крутящего момент а на роторе буровой установки по напряжениям и током, действующим в роторной цепи приводного асинхронного электродвигателя с фазным ротором с учетом передаточного отношения коробки передач 3.
Недостаткам этого способ являются невозможность его использования для измерения момента асинхронных короткозамкнутых двигателей, используемых, например, в электробурах установок нефтяных и газовых скважин, а также низкая точность измерения, обусловленная тем, что при моментах, близких к максимальному, линейная зависимость между активной мощностью, оборотами и моментом нарушается из-за перерасчпределе- ния активных и реактивных мощностей в электродвигателе, что приводит к дополнительной погрешности измерения момента.
Целью изобретения является повышение точности.
Цель достигается тем, что по способу определения крутящего момента на роторе буровой установки определяют потери холостого хода электропривода установки, а на рабочем режиме работы установки измеряют активную мощность Ра, потрубляемую электроприводом, и коэффициент а несимметрии питающей сети, дополнительно на рабочем режиме измеряют реактивную мощность Q, потребляемую электроприводом, а потери холостого хода находят путем измерения в режиме холостого хода активной РХХ и реактивной Qxx мощности, при этом величину М крувтящего момента определяют из выражения
м (Рхх -Pa+Qxx -Q) (Ра-Рхх) ,ч
М а PPxx(Qa+Q)+Qxx(Q-Pa) (1 } где а - коэффициент, постоянный для данного типа электропривода.
Существенным отличием предлагаемого способа является то, что для определения крутящего момента на роторе буровой установки исключается необходимость измерения активных и реактивных сопротивлени и электропривода, а также потерь в токопро- воде, что в значительной степени уменьшает погрешность и повышает точность измерения.
Экономический эффект от использования предлагаемого способа составляет порядка 60 тыс. руб. в год за счет упрощения изготовления и эксплуатации увстройства, реализующего предлагаемый способ, а также за счет повышения точности измерения.
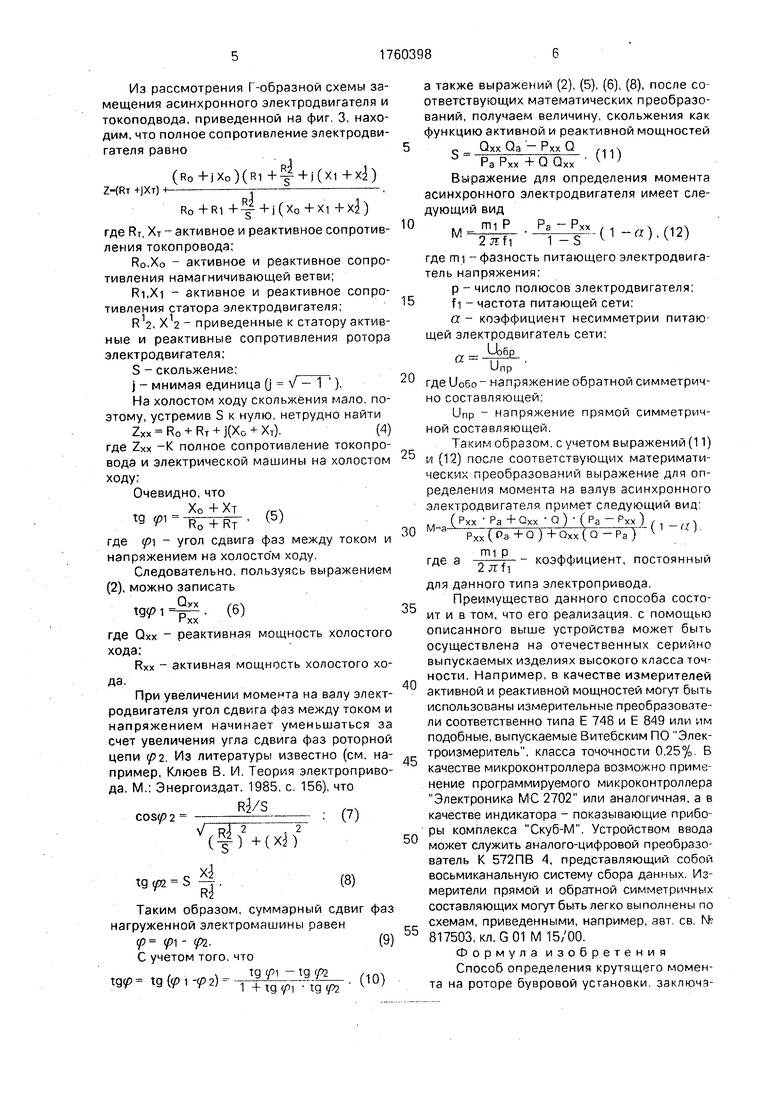
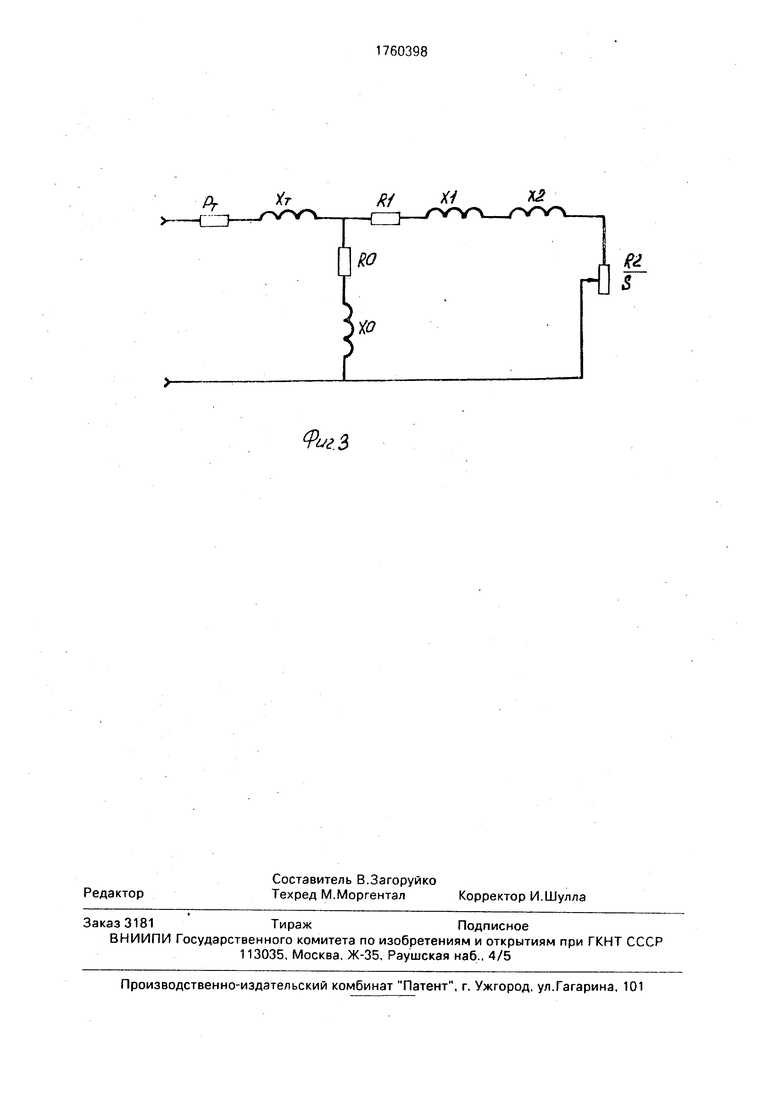
На фмг. 1 приведен функциональная схема устройства, реализующее предлагаемый способ; на фиг 2 приведен труугольник мощностей; на фиг. 3 приведан Г-образная
схема замещения асинхронного электродвигателя и токопровода.
Устройство содержит датчик 1 напряжения, датчики 2 и 3 тока, включенные в цепь
электрической машины 4, измерители 5 и-6 прямой и обратной симметричнных напряжения сети, измерители 7 и 8 активной и реактивной мощностей, формирователь 9, устройство 10 ввода, пульт 11 управления,
микроконтроллер 12 и индикатор 13.
Устройство работает следующим образом.
При включении электродвигателя в сеть сигналы с датчика 1 напряжения поступают
на измерители прямой 5 и обратной 6 симметричных составляющих напряжения, формирователь 9. измерители активной 7 и реактивной 8 мощностей, на которые поступают также сигналы с датчиков 2 и 3 тока.
Двигатель начинает работать на холостом ходу. Нэ первом выходе формирователя 9 появляемся сигнал высокого уровня, свидетельствующий о включении электродвигателя и работе его на холостом ходу. При этом
значение активной и реактивной мощностей холостого хода заносятся в память микроконтроллера 12, после чего микроконтроллер воздействует через устройство 10 ввода на формирователь 9, снимает на его первом выходе напряжение высокого уровня, На втором выходе формирователя 9 поддерживается сигнал высокого уровня, свидельствующий о том, что на электродвигатель подано напряжение. Далее микроконтроллер 12 через устройство 10 ввода опрашивает измерители 5 и 6 прямой и обратной симметричных составляющих, измерители 7 и 8 активной и реактивной мощностей и формирователь 9
и по соответствующей программе управления производит вычисления значения момента согласно выражениям, приведенным ниже.
Известно, что полная, активная и реактивная мощности связаны между собой тре- нугопьником мощностей, приведенным на фиг. 2 (см. например, общая электротехника с основами электроники. В. А. Гаврилюк и др., Киев: Вищз школа, 1989, с. 92, 93).
Рполн
V р| + Q2
(1)
где Рполн - полная мощность.
р - угол сдвига фаз между током и напряжением на зажимах устройства, при этом
Л
Ра
tgp
(2)
Из рассмотрения Г-образной схемы замещения асинхронного электродвигателя и токоподвода, приведенной на фиг. 3, находим, что полное сопротивление электродвигателя равно
(Ro+jXo)(Rl+4-H(X1+X)
Z-KRT +JXT) н-г,
RO+R1 + +j(X0+Xi + Х21)
где RT, Хт - активное и реактивное сопротивления токопровода;
Ro.Xo - активное и реактивное сопротивления намагничивающей ветви;
Ri.Xi - активное и реактивное сопротивления статора электродвигателя;
R12, X12 - приведенные к статору активные и реактивные сопротивления ротора электродвигателя;
S - скольжение;
- мнимая единица 0 1 )
На холостом ходу скольжения мало, поэтому, устремив S к нулю, нетрудно найти
ZXX RO + RT + J(XO + XT).
(4)
где Zxx -К полное сопротивление токопровода и электрической машины на холостом ходу;
Очевидно, что
Хо г XTfr-
tg p -R-pf, (5)
где 1 - угол сдвига фаз между током и напряжением на холостом ходу,
Следовательно, пользуясь выражением (2), можно записать
w -fe- №
где Qxx реактивная мощность холостого хода;
Rxx активная мощность холостого хода.
При увеличении момента на валу электродвигателя угол сдвига фаз между током и напряжением начинает уменьшаться за счет увеличения угла сдвига фаз роторной цепи (р2. Из литературы известно (см. например, Клюев В. И. Теория электропривода. М.: Энергоиздат. 1985, с. 156), что
Rl/Sы
cosy 2 - : (7)
)2
.
(8)
Таким образом, суммарный сдвиг фаз нагруженной электромашины равен
Ф pi - (.(9)
С учетом того, что
tg y3i - tg tpi
tgy tg ((p 1 2)
1 + tg р tg (pi
(10)
10
15
20
25
30
35
40
45
50
55
а также выражений (2), (5), (6), (8), после соответствующих математических преобразований, получаем величину, скольжения как функцию активной и реактивной мощностей
QxxQa-PxxQ М1ч
PaPxx+QQxx {
Выражение для определения момента асинхронного электродвигателя имеет следующий вид
-ИГ )
где mi - фазность питающего электродвигатель напряжения;
р - число полюсов электродвигателя;
fi - частота питающей сети;
а - коэффициент несимметрии питающей электродвигатель сети;
„ Шэбр
Unp
где Уобо - напряжение обратной симметрично составляющей;
Unp - напряжение прямой симметричной составляющей.
Таким образом, с учетом выражений (11) л (12) после соответствующих материмати- ческих преобразований выражение для определения момента на валув асинхронного электродвигателя примет следующий виц(РХХ Ра +0хх Q) (Ра - РХХ
М-аPxx(Pa+Q)+Qxx(Q -Ра) Ш1 Р
а)
где a о jrf коэФФиЦиент постоянный
для данного типа электропривода.
Преимущество данного способа состоит и в том, что его реализация, с помощью описанного выше устройства может быть осуществлена на отечественных серийно выпускаемых изделиях высокого класса точности. Например, в качестве измерителей активной и реактивной мощностей могут быть использованы измерительные преобразователи соответственно типа Е 748 и Е 849 или им подобные, выпускаемые Витебским ПО Электроизмеритель, класса точочности 0,25% Б качестве микроконтроллера возможно применение программируемого микроконтроллера Электроника МС 2702 или аналогичная, а в качестве индикатора - показывающие приборы комплекса Скуб-М. Устройством ввода может служить аналого-цифровой преобразователь К 572ПВ 4, представляющий собой восьмиканальную систему сбора данных. Измерители прямой и обратной симметричных составляющих могут быть легко выполнены по схемам, приведенными, например, авт св. № 817503, кл. G 01 М 15/00.
Формула изобретения Способ определения крутящего момента на роторе бувровой установки, заключзющийся в том, что определяют потери холостого хода электропривода установки, а на рабочем режиме работы установки измеряют активную мощность Ра, потребляемувю электроприводом, и коэффициент несимметрии питающей сети, отличающийся тем, что. с целью повышения точности, дополнительно на рабочем режиме измеряют реактивную мощность Q. потребляемую электроприводом, а потери холостого хода находят путем
измерения в режиме холостого хода активной Рхх и реактивной Qxx мощности, при этом величину М крутящего моментаределя- ют из выражения
м (рхх Pa+Qxx -Q) (Ра-Рхх) ( , ч M-aV Pxx(Qa+Q)+QXx(Q-Pa) (1-°° где а - коэффициент постоянный для данного типа электропривода.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Устройство для измерения крутящего момента на роторе буровой установки | 1978 |
|
SU717573A1 |
| Электропривод переменного тока | 1986 |
|
SU1379933A2 |
| СПОСОБ СТАБИЛИЗАЦИИ ЧАСТОТЫ ВРАЩЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕЙ ПЕРЕМЕННОГО ТОКА (ВАРИАНТЫ) | 2000 |
|
RU2164053C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2014 |
|
RU2564692C1 |
| СИНХРОННО-АСИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ С КОРОТКОЗАМКНУТОЙ ОБМОТКОЙ РОТОРА | 1997 |
|
RU2153755C2 |
| Электропривод переменного тока | 1985 |
|
SU1272463A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2014 |
|
RU2570363C1 |
| Устройство управления асинхронным электродвигателем | 1974 |
|
SU524298A1 |
| Устройство для измерения крутящего момента на роторе буровой установки | 1986 |
|
SU1377630A1 |
Сущность изобретения: определяют потери холостого хода электропривода установки в виде активной Рхх и реактивной QXx мощностей, а на рабочем режиме работы установки измеряют активную Ра и реактивную Q мощности и коэффициент а несимметрии питающей цепи, при этом величину М крутящего момента определяют из выражения М а(Рхх Ра + Qxx Q) (Ра-Рхх) / Pxx(Pa+Q) + Qxx(Q-Pa) (1-а), где a - коэффициент, постоянный для данного типа электропривода. 3 ил.
Сеть
Фиг
Рполн
Фиг. &
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ крашения тканей | 1922 |
|
SU62A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| И | |||
| о- ом И. | |||
