Изобретение относится к синхронным электрическим машинам и может быть использовано, например, в высокомоментных электроприводах.
Известен вентильный двигатель, содержащий статор с m-фазной обмоткой и ротор с постоянными магнитами, на одном валу с двигателем расположен датчик положения, выполненный в виде отдельной электрической машины.
Недостатком такого вентильного двигателя является сложная конструкция, что обусловлено наличием дополнительной электрической машины,
Известен вентильный индукторный двигатель, содержащий зубчатый ротор и статор с зубцами, в пазы между которыми уложена m-фазная обмотка двигателя и катушки m-фазного датчика положения, собранные в фазах в последовательные ветви, каждая ветвь образована катушками, смещенными вдоль расточки на угол 360 эл.град., соединенными между собой конец с концом, начало с началом.
Недостатком известного двигателя является ограниченная область применения вследствие низких точностных показателей датчика положения.
Целью изобретения является расшире- ние области применения вентильного индукторного двигателя за счет повышения точностных показателей датчика.
В вентильном индукторном двигателе, содержащем зубчатый ротор и статор с по- люсами, на котором расположены катушки m-фазного датчика, собранные в фазах в последовательные ветви, а в больших пазах между полюсами размещена обмотка двигателя, статор выполнен с 2тр полюсами (р 2, 3, 4,...), на внутренней поверхности которых расположено по zs элементарных зубцов, причем зубцовые деления статора и ротора tz выполнены одинаковыми, а расстояние между осями соседних зубцов, принадлежавшим различным полюсам, равно (Ktf 1/2.m)tz (К 1, 2, ...), в пазы между элементарными зубцами 2mq соседних полюсов (q 1, 2р) уложены катушки дат-
чика по одной на каждой половине полюса, катушки, расположенные на одном полюсе,
соединены согласно конец с концом и образуют катушечную группу, катушечные группы, расположенные на полюсах с порядковыми номерами, различающимися на 2т, считая по часовой стрелке вдоль расточки статора, соединены последовательно конец с началом и образуют ветви, ветви с катушечными группами, расположенными на полюсах с порядковыми номерами, различающимися на m соединены последовательно конец с концом, в точках соединения выполнены выводы m-фазного входа датчика, а начала m ветвей, являющиеся началами катушечных групп, расположенных на полюсах с четными и нечетными номерами, соединены вместе и в точках соединения выполнены выводы однофазного входа датчика положения.
В вентильном индукторном двигателе катушки датчика в элементарных пазах могут быть собраны в две m-фазные схемы, причем обмотки каждой схемы датчика размещены не менее чем на 2т соседних полюсах.
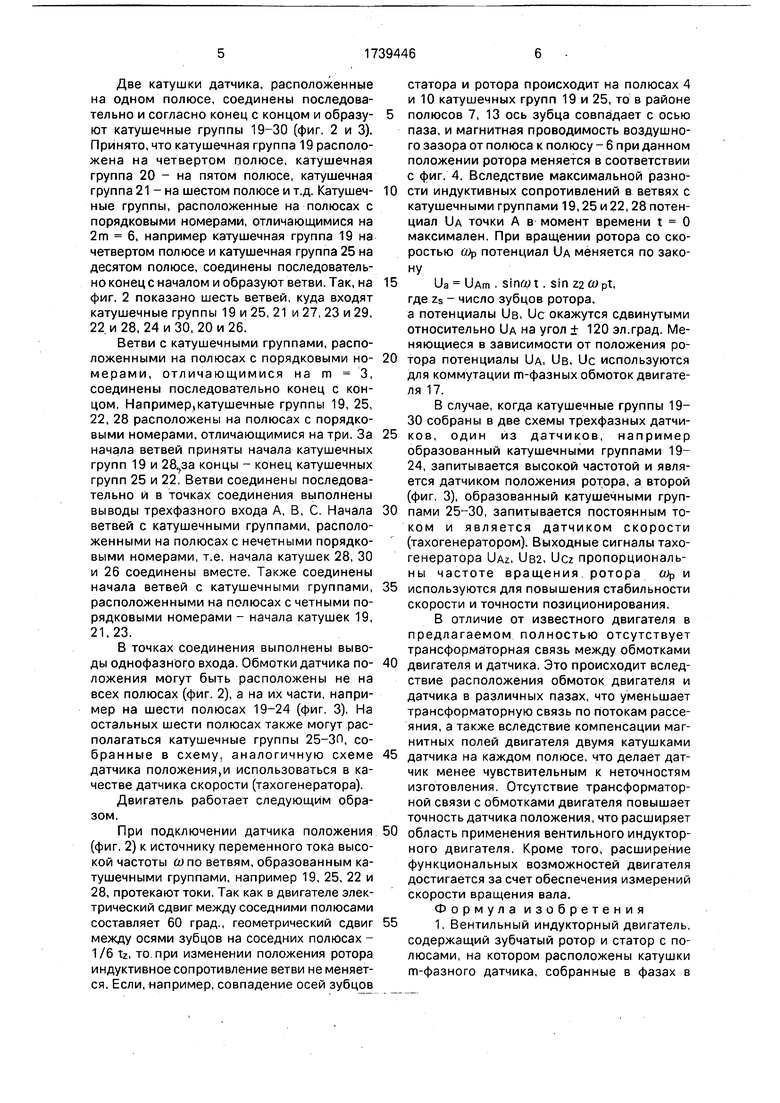
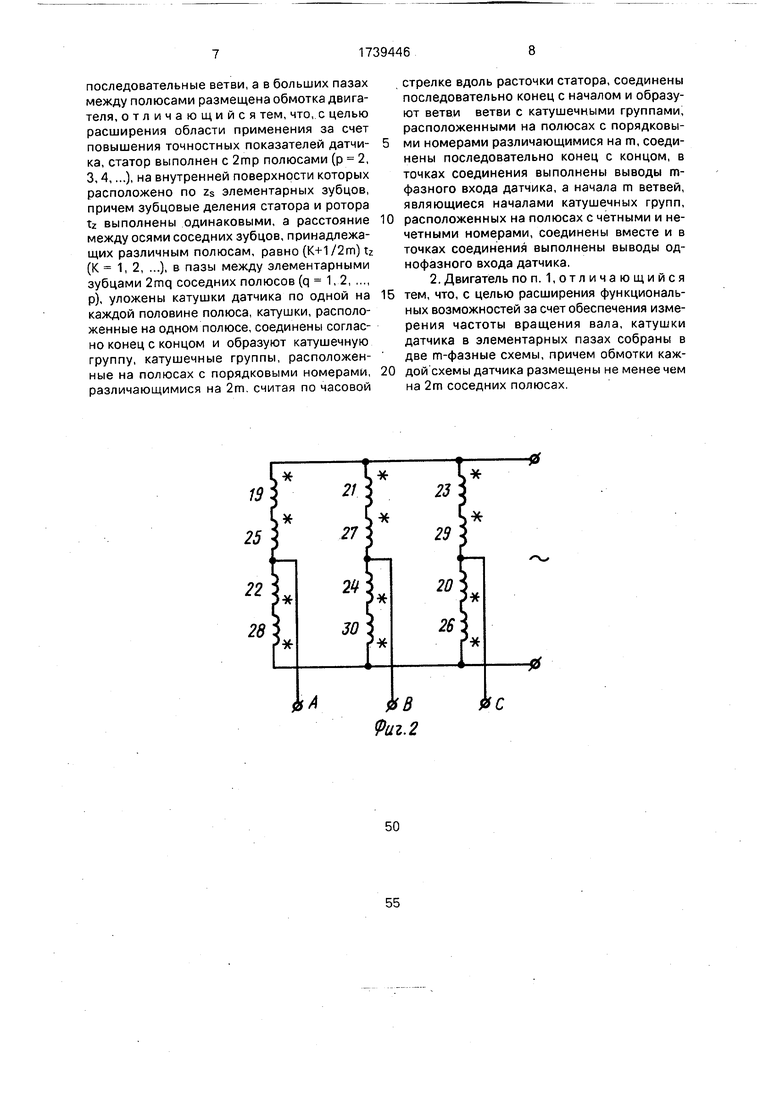
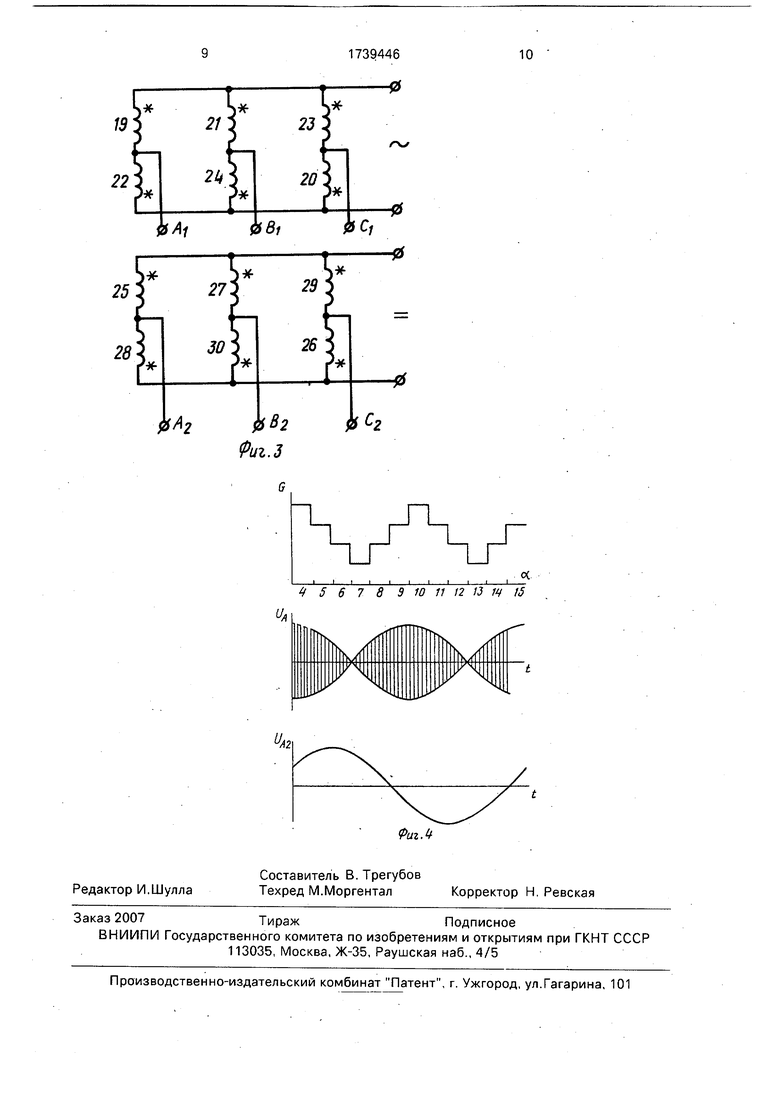
На фиг. 1 показан вертикальный индукторный двигатель, разрез; на фиг. 2 - схема соединения катушечных групп датчика; на фиг. 3 - схемы соединения катушечных групп датчика положения и датчика скорости тахогенератора; на фиг. 4-график распределения проводимости воздушного зазора.
Рассмотрим трехфазный вентильный индукторный двигатель с 12-ю полюсами,
Двигатель (фиг. 1) состоит из ротора 1 с зубцами 2 и статора 3 с полюсами 4-15, на внутренней поверхности полюсов выполнены элементарные зубцы 16. В большие пазы между полюсами уложена трехфазная обмотка двигателя 17. В двигателе число элементарных зубцов на полюсе zs принято равным четырем. Зубцовые деления tz ротора 1 и статора 3 выполнены одинаковыми, Расстояние между осями соседних зубцов, принадлежавших различным полюсам, например четвертому и пятому полюсам, принято равным 7/6 tz (К 1). В пазы между элементарными зубцами 16 уложена катушки датчика 18, по одной на каждой половине полюса.
Две катушки датчика, расположенные на одном полюсе, соединены последовательно и согласно конец с концом и образу- ют катушечные группы 19-30 (фиг. 2 и 3). Принято, что катушечная группа 19 расположена на четвертом полюсе, катушечная группа 20 - на пятом полюсе, катушечная группа 21 - на шестом полюсе и т.д. Катушеч- ные группы, расположенные на полюсах с порядковыми номерами, отличающимися на 2т 6, например катушечная группа 19 на четвертом полюсе и катушечная группа 25 на десятом полюсе, соединены последовательно конец с началом и образуют ветви. Так, на фиг. 2 показано шесть ветвей, куда входят катушечные группы 19 и 25, 21 и 27, 23 и 29, 22 и 28, 24 и 30, 20 и 26.
Ветви с катушечными группами, расположенными на полюсах с порядковыми но- мерами, отличающимися на m 3, соединены последовательно конец с концом. Например,катушечные группы 19, 25, 22, 28 расположены на полюсах с порядковыми номерами, отличающимися на три. За начала ветвей приняты начала катушечных групп 19 и 28ъза концы - конец катушечных групп 25 и 22. Ветви соединены последовательно и в точках соединения выполнены выводы трехфазного входа А, В, С. Начала ветвей с катушечными группами, расположенными на полюсах с нечетными порядковыми номерами, т.е. начала катушек 28, 30 и 26 соединены вместе. Также соединены начала ветвей с катушечными группами, расположенными на полюсах с четными порядковыми номерами - начала катушек 19, 21,23.
В точках соединения выполнены выводы однофазного входа. Обмотки датчика по- ложения могут быть расположены не на всех полюсах (фиг. 2), а на их части, например на шести полюсах 19-24 (фиг. 3). На остальных шести полюсах также могут располагаться катушечные группы 25-ЗП, собранные в схему, аналогичную схеме датчика положения,и использоваться в качестве датчика скорости (тахогенератора).
Двигатель работает следующим образом.
При подключении датчика положения (фиг. 2) к источнику переменного тока высокой частоты ото ветвям, образованным катушечными группами, например 19, 25, 22 и 28, протекают токи. Так как в двигателе электрический сдвиг между соседними полюсами составляет 60 град., геометрический сдвиг между осями зубцов на соседних полюсах - 1/6 tz, то при изменении положения ротора индуктивное сопротивление ветви не меняется. Если, например, совпадение осей зубцов
статора и ротора происходит на полюсах 4 и 10 катушечных групп 19 и 25, то в районе полюсов 7, 13 ось зубца совпадает с осью паза, и магнитная проводимость воздушного зазора от полюса к полюсу - 6 при данном положении ротора меняется в соответствии с фиг. 4. Вследствие максимальной разности индуктивных сопротивлений в ветвях с катушечными группами 19,25 и 22,28 потенциал UA точки А в момент времени t О максимален. При вращении ротора со скоростью и)р потенциал UA меняется по закону
Ua UAm . Siflto t . Sin Z2 Ш pt,
где zs - число зубцов ротора, а потенциалы UB, Uc окажутся сдвинутыми относительно UA на угол + 120 эл.град. Меняющиеся в зависимости от положения ротора потенциалы UA, UB, Uc используются для коммутации m-фазных обмоток двигателя 17.
В случае, когда катушечные группы 19- 30 собраны в две схемы трехфазных датчиков, один из датчиков, например образованный катушечными группами 19- 24, запитывается высокой частотой и является датчиком положения ротора, а второй (фиг, 3), образованный катушечными группами 25-30, запитывается постоянным током и является датчиком скорости (тахогенератором). Выходные сигналы тахогенератора UAZ, UB2, Ucz пропорциональны частоте вращения ротора Wp и используются для повышения стабильности скорости и точности позиционирования.
В отличие от известного двигателя в предлагаемом полностью отсутствует трансформаторная связь между обмотками двигателя и датчика. Это происходит вследствие расположения обмоток двигателя и датчика в различных пазах, что уменьшает трансформаторную связь по потокам рассеяния, а также вследствие компенсации магнитных полей двигателя двумя катушками датчика на каждом полюсе, что делает датчик менее чувствительным к неточностям изготовления. Отсутствие трансформаторной связи с обмотками двигателя повышает точность датчика положения, что расширяет область применения вентильного индукторного двигателя. Кроме того, расширение функциональных возможностей двигателя достигается за счет обеспечения измерений скорости вращения вала.
Формула изобретения
1. Вентильный индукторный двигатель, содержащий зубчатый ротор и статор с полюсами, на котором расположены катушки m-фазного датчика, собранные в фазах в
последовательные ветви, а в больших пазах между полюсами размещена обмотка двигателя, отличающийся тем, что, с целью расширения области применения за счет повышения точностных показателей датчи- ка, статор выполнен с 2тр полюсами (р 2, 3,4,...), на внутренней поверхности которых расположено по zs элементарных зубцов, причем зубцовые деления статора и ротора tz выполнены одинаковыми, а расстояние между осями соседних зубцов, принадлежащих различным полюсам, равно (К+1 /2m) tz (К 1, 2, ...), в пазы между элементарными
зубцами 2mq соседних полюсов (q 1,2
р), уложены катушки датчика по одной на каждой половине полюса, катушки, расположенные на одном полюсе, соединены согласно конец с концом и образуют катушечную группу, катушечные группы, расположен- ные на полюсах с порядковыми номерами, различающимися на 2т. считая по часовой
стрелке вдоль расточки статора, соединены последовательно конец с началом и образуют ветви ветви с катушечными группами, расположенными на полюсах с порядковыми номерами различающимися на т, соединены последовательно конец с концом, в точках соединения выполнены выводы т- фазного входа датчика, а начала m ветвей, являющиеся началами катушечных групп, расположенных на полюсах с четными и нечетными номерами, соединены вместе и в точках соединения выполнены выводы однофазного входа датчика,
2. Двигатель по п. 1,отличающийся тем, что, с целью расширения функциональных возможностей за счет обеспечения измерения частоты вращения вала, катушки датчика в элементарных пазах собраны в две m-фазные схемы, причем обмотки каждой схемы датчика размещены не менее чем на 2т соседних полюсах.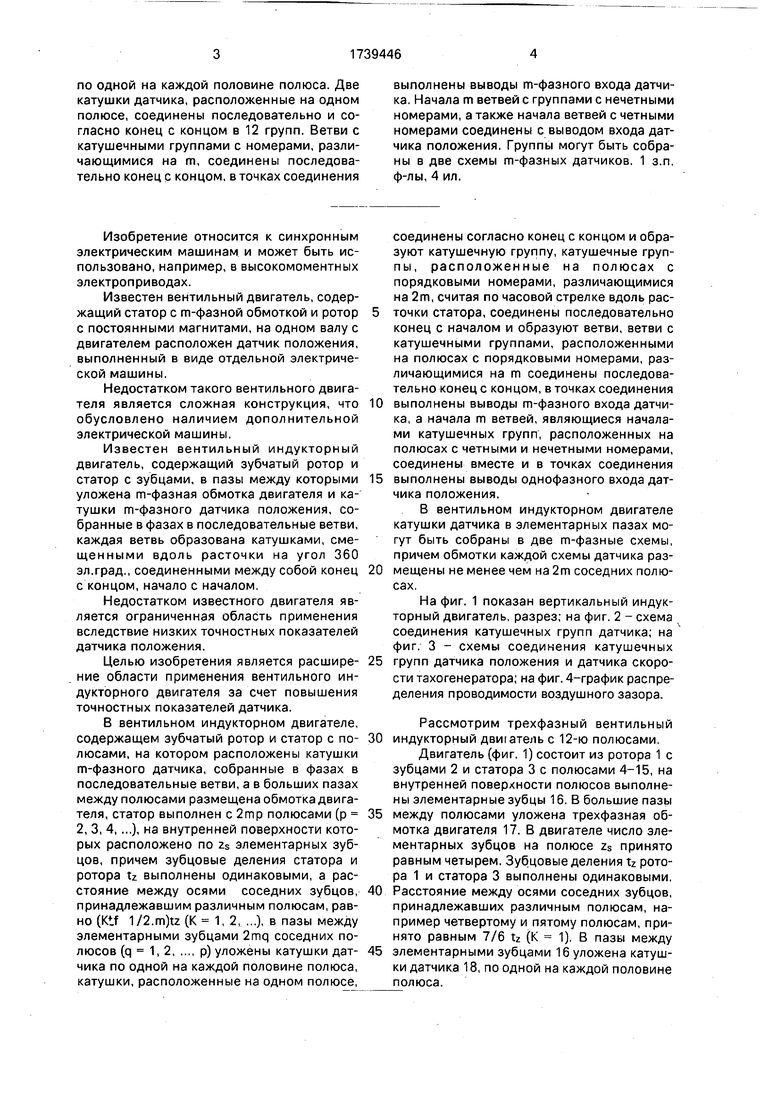
Использование: высокомоментные электроприводы. Сущность изобретения: двигатель состоит из ротора 1 с зубцами 2 и статора 3 с 2 тр полюсами, на внутренней поверхности которых выполнены элементарные зубцы 16. В больших пазах между полюсами уложена m-фазная обмотка двигателя 17. Зубцовые деления tz статора 3 и ротора 1 выполнены одинаковыми. В пазах между зубцами 16 на 2mq соседних полюсах (q 1, 2р) уложены катушки датчика 18,
13
21
25
27
22
24
28
30
ЬА
23
29
20
26
#в
Риг.2
0С
W j2J
22
24
20
M/
0Bi
0C/
25
29
25
J/7
26
ЈЛ2Л 20 C2
Риг.З
4 5 6 7 8 9 10 11 12 13 w 15
| Вентильная электрическая машина | 1987 |
|
SU1473026A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Вентильный индукторный электродвигатель | 1987 |
|
SU1464264A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
